Hello,
I got problem with my scanning/photography missions. Owning quadcopter 800 class and running arducopter 3.6.9 on it. When starting any auto mode (auto, rtl) the ground speed never exceeds 3m/s despite the WPNAV_SPEED is set to 800 or even higher values like 1200cm/s.
First I suspected ANGLE_MAX is too low but then I checked it, it is set to 5000cdeg.
During the auto mission speeds never exceeded 3.2m/s (by telemetry) and when switched to RTL the ground speed was still the same around 3m/s.
Can somebody please help me, how to increase effective ground speed during mission? I attached param-file from my copter and even one log file from mission too.
quad800.ac.3.6.9.param (13.8 KB)
2020-05-23 09-03-46.zip (620.9 KB)
The max you can reach is 10 m/s. Are you in the latest release.
This probably has to do with your quad size, Weight, motor, and battery power.
Quad is having difficulty maintaining the height hence cruising at slow speed to maintain the lift/Alt as defined.
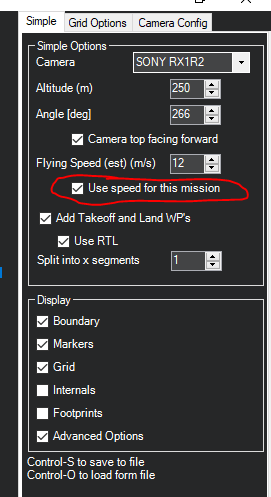
“The maximum horizontal speed of the copter can be adjusted with the Speed (aka WPNAV_SPEED) parameter from the Mission Planner’s Config/Tuning >> Copter Pids screen (see blue box above). The default is 500 meaning 5m/s. A typical copter can reach top speeds of 10m/s ~ 13m/s (i.e. 1000 ~ 1300) before it becomes unable to both maintain altitude and horizontal speed.”
During the mission throttle was about 30%. Does it means if I lift up the throttle bit the Ground speed would rise too?
No RTL speed is separate from throttle.
What type of drone do you have, motor size, battery size etc.
Not familiar with Owning quadcopter 800
4 x Sunnysky 4110S
4s4p Lion total capacity 12000mah
Total weight cca 4200g
Wheelbase cca 800mm
Funniest thing is it did higher speeds in auto modes for sure in the past
Props are 14/9 I guess
I cant find the spec sheets of the motor, do u have a link…
Sorry i misstyped it
What size of props are you using?
I’m not by the copter now but i guess I bought 14/9 2 blade props
The motor needs min 22.5 Volts, so you are under voltage to begin with.
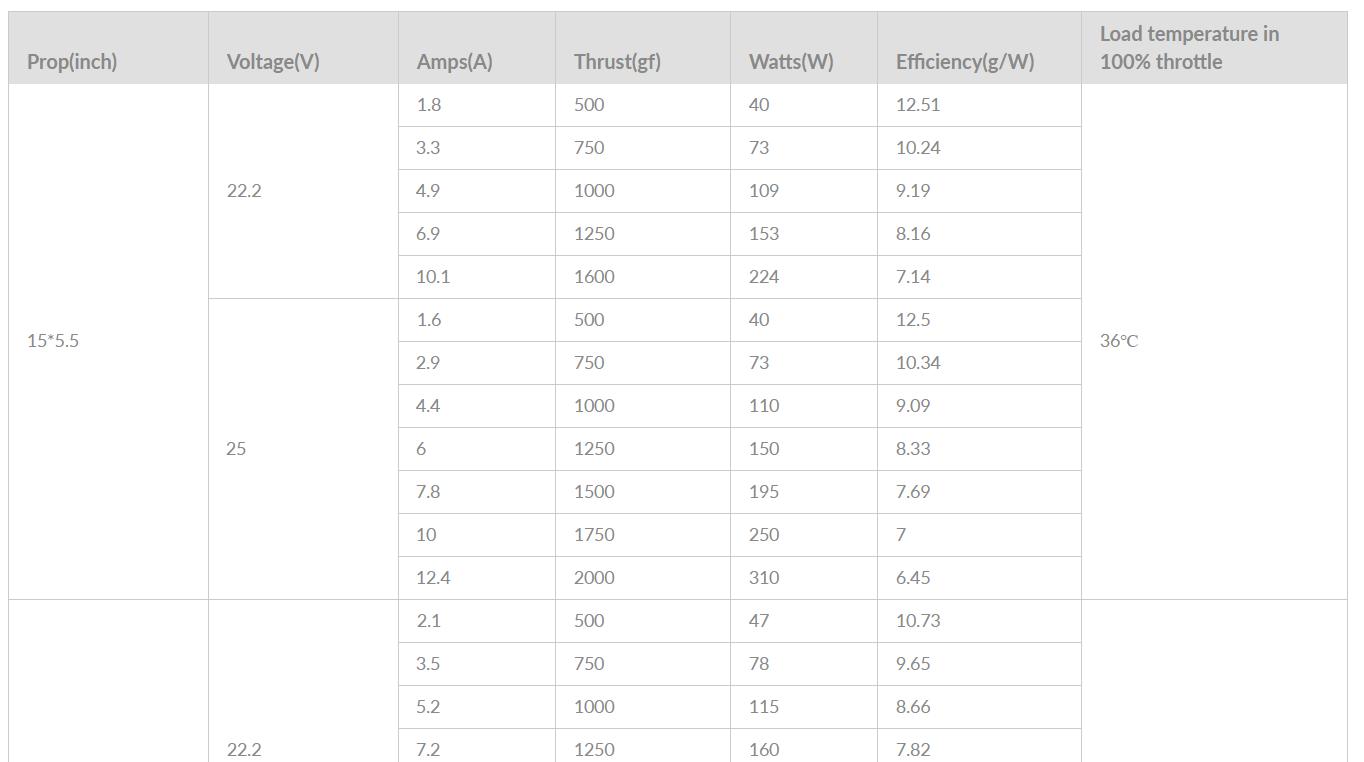
so if you are using lets say a 15.5 Pro, and using a 6S battery, you thrust is about 1600 g x 4 = 6400 grams. So about 2:1 ratio.
try a bigger voltage battery.
Do you have correct ESC’s to handle like 6S?
You have 6S motors and you are using 4S batteries…
Always read motors spec sheets.
the correct Engineering method is;
-
decide on motors based on the total thrust you want. You want min 2:1 ratio or 3:1 thrust ratio compare to drone weight.
-
ESC must support the battery required and must support voltage required of the Motors for optimal performance.
-
Decide on battery.
-
Always use recommended props suggested by Motor manufacture if you are new to these types of builds.
Also, you have not mentioned if you have 340KV or 400 Kv. That will also make a difference.
read specs…https://sunnyskyusa.com/products/sunnysky-x4110s-motors?variant=15989433892958
The motor is different not the one they offer now, I got it 4years ago. It is signed with 4110S KV580. See here
https://edge-china.en.alibaba.com/product/60458943036-804543289/Genuine_SUNNYSKY_X4110S_RC_Model_Multirotor_High_Power_Brushless_Motor_4110_for_FPV.html
And I definitely remember it was rated for 4s only, no more for sure, therefore I equiped it with 4s accu. The props are 1447 two blades.
ESCs are powerful too.
Anyway I would say it has lots of power, howering is about 25-30% of throttle.