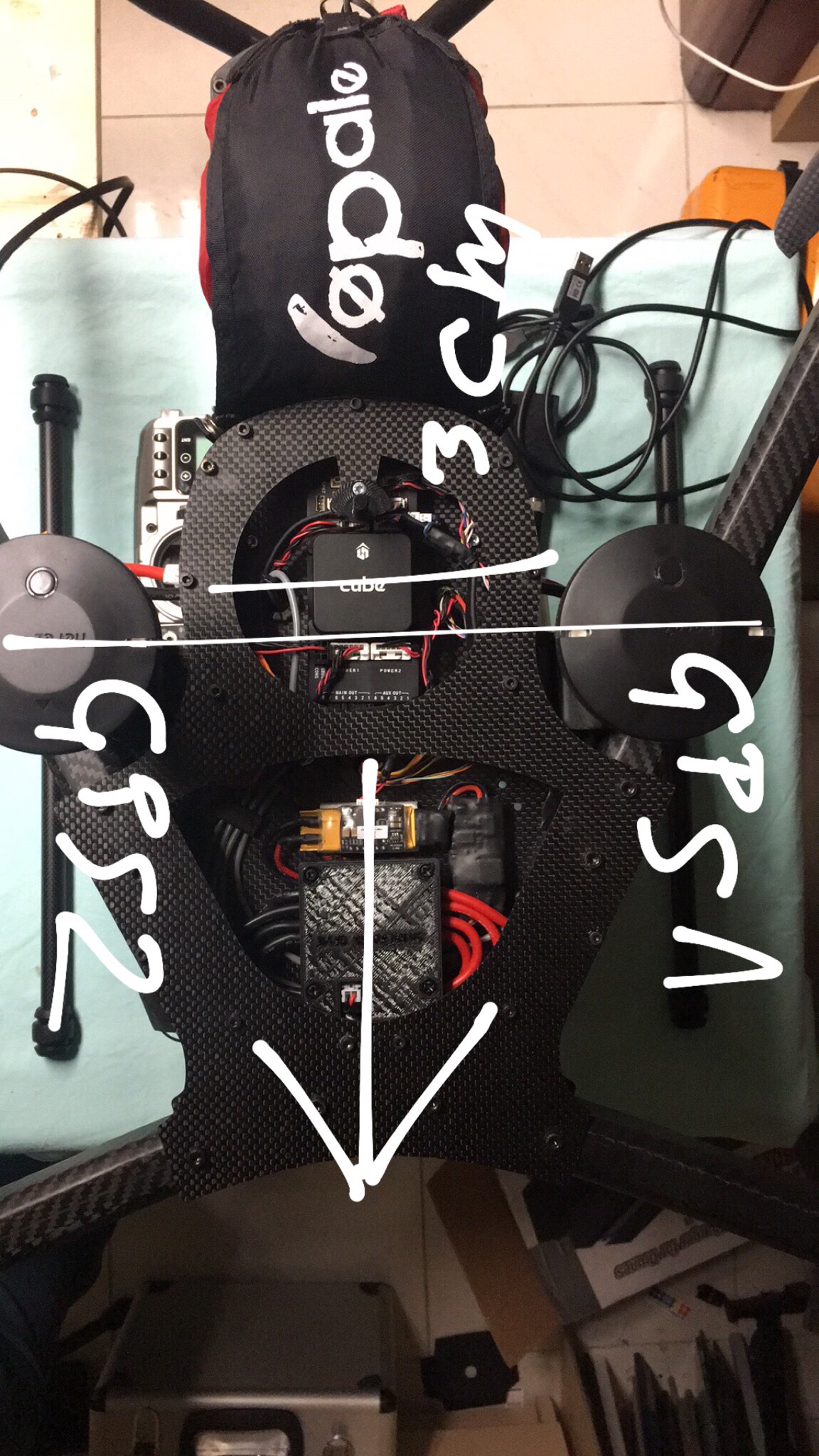
hello , I need help about x,y, and z for gps1 and gps2 …
the cube is mounted looking back of copter , so AHRS is set to yaw 180 …
but how should I correctly set x,y, and z for gps , is it just normal like when cube is oriented forward in frame or does it have to be set some other way…