This is the second quad that I updated to this beta version and I get this same message.
I am using different gps’s.
I just flashed 4.5.7 back and the gps error went away
I dont get that issue with 4.6 Beta 2 or 3 (or earlier)
(unrelated messages removed from this output)
29/01/2025 11:06:08 AM : EKF3 IMU2 is using GPS
29/01/2025 11:06:08 AM : EKF3 IMU0 is using GPS
29/01/2025 11:06:08 AM : EKF3 IMU1 is using GPS
29/01/2025 11:05:53 AM : u-blox 1 HW: 00080000 SW: EXT CORE 3.01 (107900)
29/01/2025 11:05:51 AM : GPS 1: u-blox saving config
29/01/2025 11:05:47 AM : Field Elevation Set: 57m
29/01/2025 11:05:47 AM : EKF3 IMU2 origin set
29/01/2025 11:05:47 AM : EKF3 IMU0 origin set
29/01/2025 11:05:47 AM : EKF3 IMU1 origin set
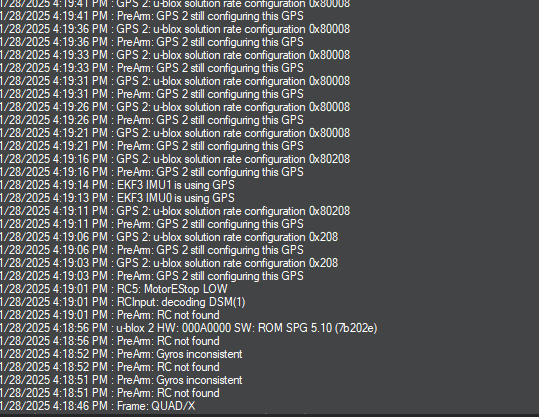
29/01/2025 11:05:37 AM : GPS 1: detected u-blox
29/01/2025 11:05:37 AM : GPS 1: probing for u-blox at 230400 baud
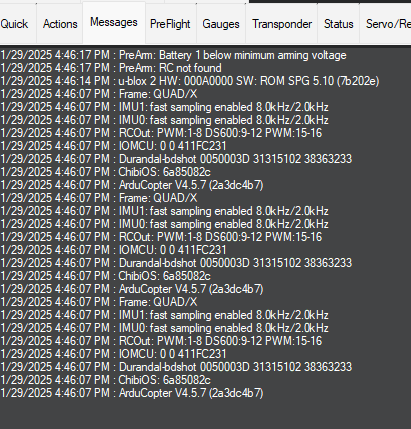
29/01/2025 11:05:29 AM : ArduCopter V4.6.0-beta3 (110acc96)
What are all of your GPS and SERIAL settings?
@xfacta Are you running single or dual gps units?
I’ll have to get my serial settings tomorrow and report back.
One other thing to note is after I flashed the beta 3 firmware my quad was unflyable. It all the sudden had terrible oscillations. When I flashed the 4.5.7 back they went away.
The flight controller is holy bro durandal.
1 gps is um982 and 1 is holy bro m10 in the case.
Hi @prsh8ya,
Can we see a log of the flyable-on-4.5 vs unflyable on 4.6?
It’s really difficult to investigate without logs
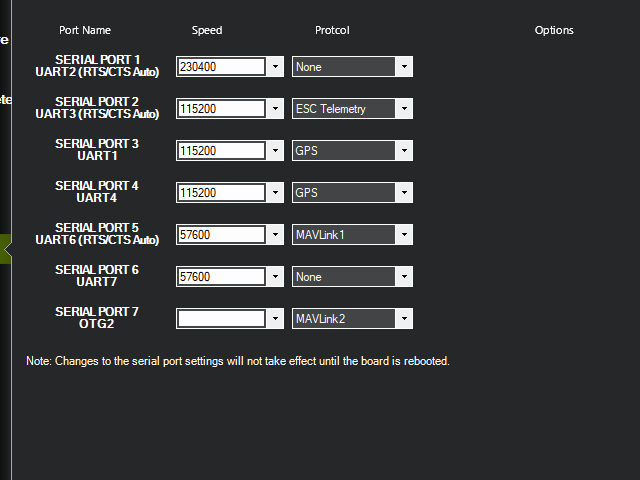
Serial ports should be:
SERIAL3_BAUD,230
SERIAL3_OPTIONS,0
SERIAL3_PROTOCOL,5
and same for SERIAL4 - Ardupilot tries all valid baud rates until a GPS unit responds (or not) unless you know your GPS unit will only do a specific baud rate.
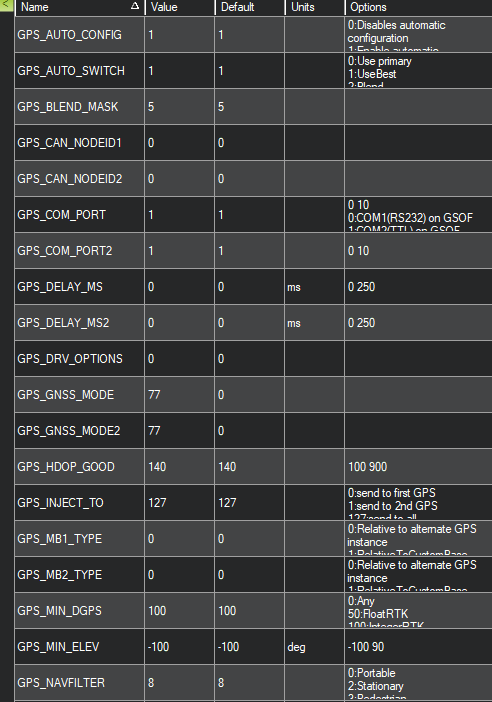
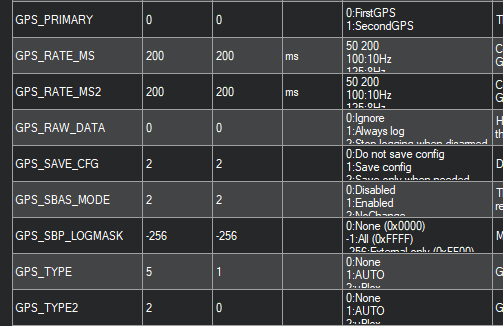
Your GPS_GNSS_MODE2 should be 5 or 65 - it wont do all those other constellations at once.
I tried both baud rates but didn’t change anything.
I’ll try the mode and see if that changes anything
I’d really like to see both the beta3 log and the 4.5.7 log showing this!
I will look back through my logs and get you a copy
@xfacta @rmackay9 @tridge
I havent looked through this logs on these files, the 4.5.7 was smooth and the beta 3 was all over the placewith oscillations, all I remember doing was a fw upgrade only.
Those three logs are no different for GNSS-related parameters. I did not see a config error message.
Try using GPS1_GNSS_MODE,5 since the first GNSS unit is erratic with it’s update rate.
Probably use GPS2_GNSS_MODE,65 for the other.
If that update rate is affecting the position controller you could set PSC_VELXY_D,0.25 to settle it down a bit.
These do change between the two 4.6 Beta logs, but nothing else of any consequence:
ATC_RAT_PIT_D
ATC_RAT_PIT_I
ATC_RAT_PIT_P
You should really set these:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
LOG_BITMASK,180222
I would say the instability is just general tuning - it would be nice to confirm if the harmonic notch filter is configured correctly too, but you should open a separate discussion if you have any trouble with tuning.
1 Like
: ArduCopter V4.6.0-beta3 (110acc96) Hi alI, I am getting a bad battery error for what it’s worth on two tests battery’s. using the standard # 4 in the params.

How can i tell if i have a bad battery I wonder.
I getting this error PreArm: “Need Position Estimate” this is keeping me from flying in loitor.
I have 12 sats currently. I can fly in Stabilize as normally I do.
I can fall back or replace the GPS will check the card as well.
I have downgraded to 4.5.7 so I can take off in loiter otherwise I get the gps 1 still config error.
Hi, I think i just fixed the issue.
I replaced the GPS with a new one and powered up in the location i am flying a few times now the home location is working. I normally take off in Stabilize then move to Loitor. oddly when doing the compass dance only one green bar came up but decided i try it.
1 Like
If you try and take off in loiter will it?
I will try it now and let you know.
I was able to take off in Loiter it was spongy drifting not normal Autopilot quality. I going to reseat everything screw it down to the body and recalibrate that should fix it unless Devs are changing Pids away from stock.
1 Like