Here you can find many details. The overall result is good. In the following there are fundamental considerations; some of them help to know what is really happening.
GPS shadowing.
Compasses.
Trying external compasses or mumetal didn’t help much. I ended with the internal one and one on the RTK GPS, which is placed far away from the motor. Calibration is done with the motor out. Many times before starting a mission “Compasses inconsistent” is heard; moving the car a few millimeters (fraction of rotor turn) makes this alarm disappear (change motor rotor magnet position).
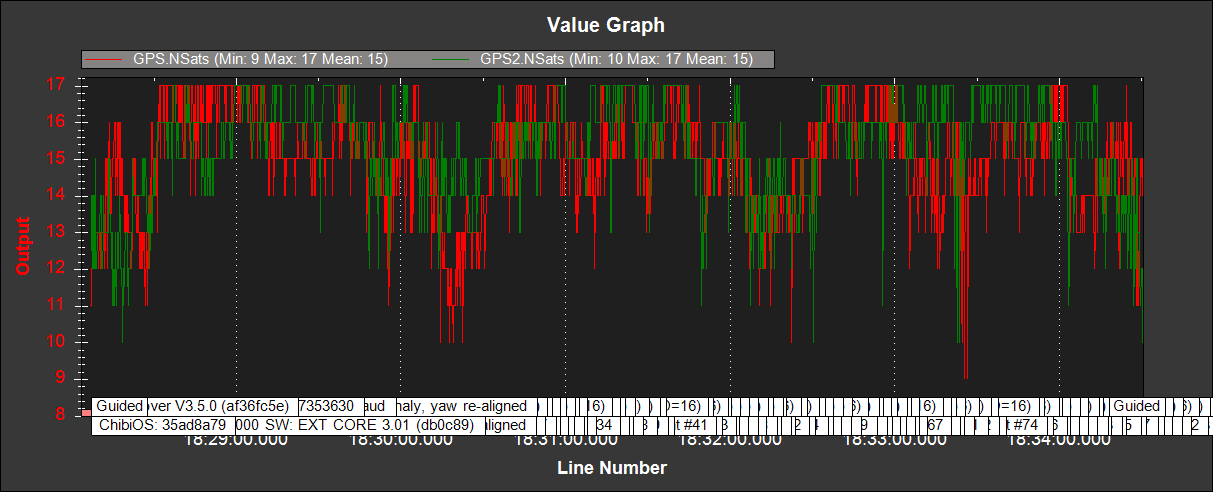
Satellites positioning.
This helps to know it in advance. I try rover missions with HDOP around 0.4.
Trajectory repeatability (rover and drones at the time with same mission).
Rover trajectory repeatability (with RTK) is quite good, but with fixed speed missions the car tends to go outside circuit limits, specially increasing speed. Drones (with conventional GPS’s) fit to trajectory is better, but with worse repeatability.
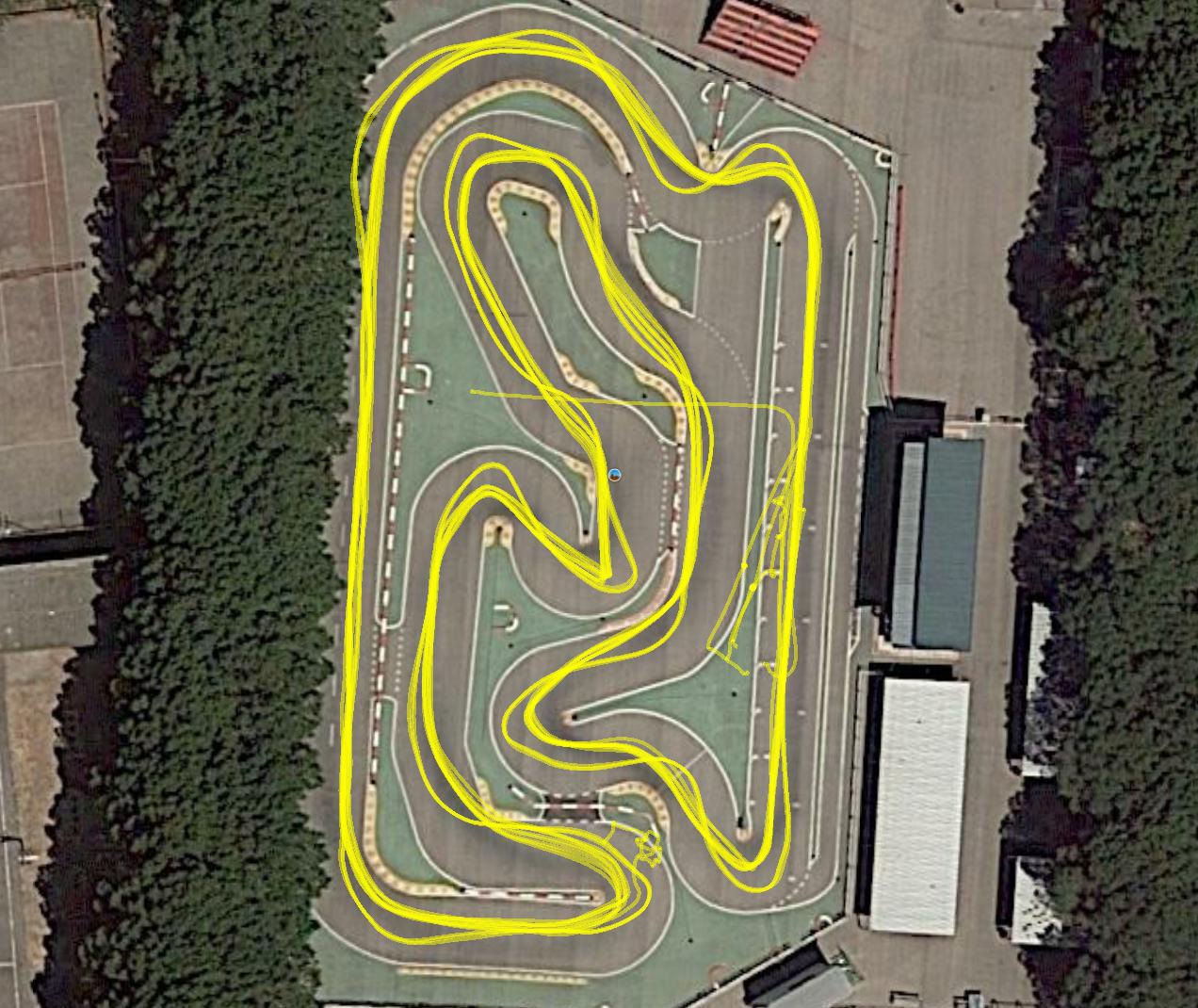
So if you try several laps (edit mission copying and pasting waypoints) you can check trajectory repeatability, and see if RTK is working.
RTK fixed/float.
Mostly rover works on RTK float. It is possible to get RTK fixed with the GPS’s used:
but that was with them still. Note that their physical separation matches the coordinates difference both NS and EW.
Conclusion: first analyze above points on your tests.