Hi everyone,
i’m studying how to develop opensource code in Ardupilot so that I can receive sensor data that i want.
I use Pixhawk2.1 Orange cube and here3.
In Here3, the manual says it can use CAN protocol, and it can’t support gps raw measurement for PPK.(Manger say use F9P if i want PPK)
But in ublox chip in here3(M8P) support RXM-RAW data in U-center message configuration, I confirmed that M8P send RXM-RAWX by using U-center.
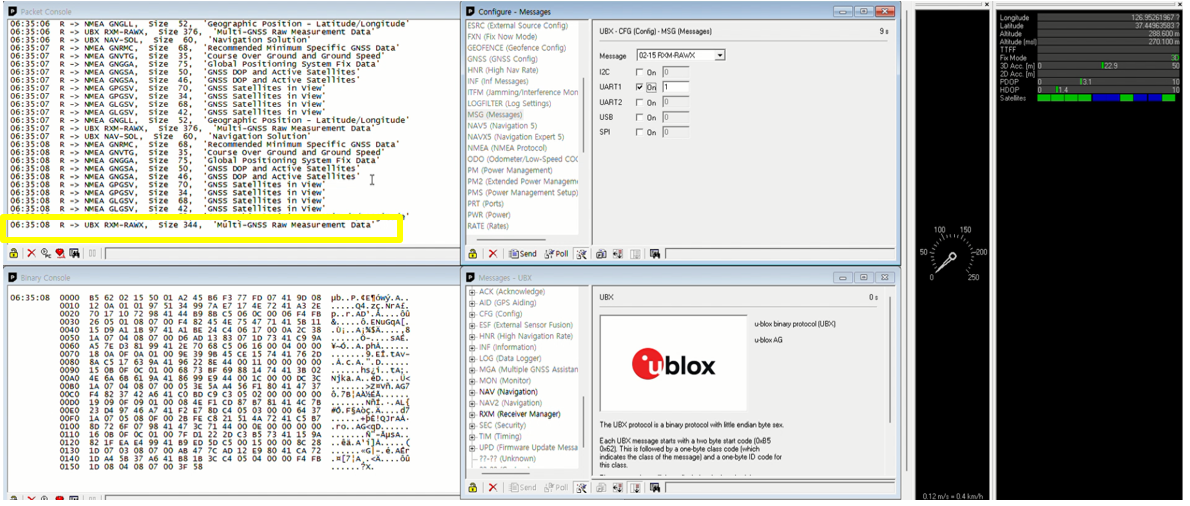
I think when sensor binary data is passed to the Pixhawk2.1,FC, there should exist code that read and parse binary data.(i.e I think here3 pass the RXM-RAW data but FC can’t read them cause CAN GPS type pkt does not support RAWX struct, only ublox GPS type supports it)
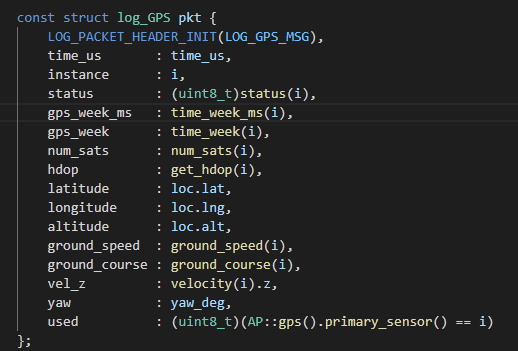
I want to read this data and log it in SD card, but i don’t know how to do this.
Is there any tip for develop to code ??(which function to be modified?)
Or I want to outsource to someone who can code to solve this problem.