Hi
I am kind of working on the Mavlink Telemetry Module based on Lora 2.4Ghz. I have done some preliminary testing with SITL and Mission Planner. I have few questions.
if I want to use telemetry , is it necessary to use GPS, can’t we fly quads without GPS and still use mission Planner or quad won’t take off in auto mode without GPS. My earlier PCB design has space for adding a GPS module.
Since I am using 2.4Ghz for Mavlink and ExLRS 2.4G on the same quad. How would I change the freq band on ExLRS, I can do the band selection on my Mavlink module .
For Auto mode or any modes that need position information, you need some sort of external position information. This could be GPS or other systems - read through the documentation.
Telemetry does not depend on position, but you may be lacking any position information in the data.
Sorry for the late reply here…
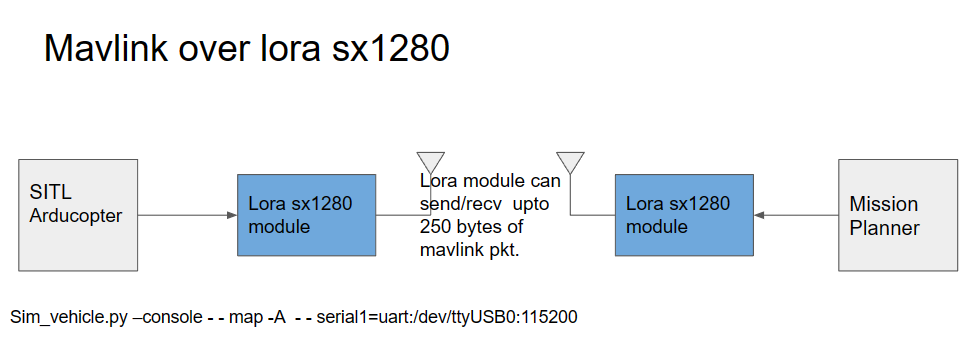
my setup is simple , I am kind of using the ExLRS for doing Mavlink telemetry.
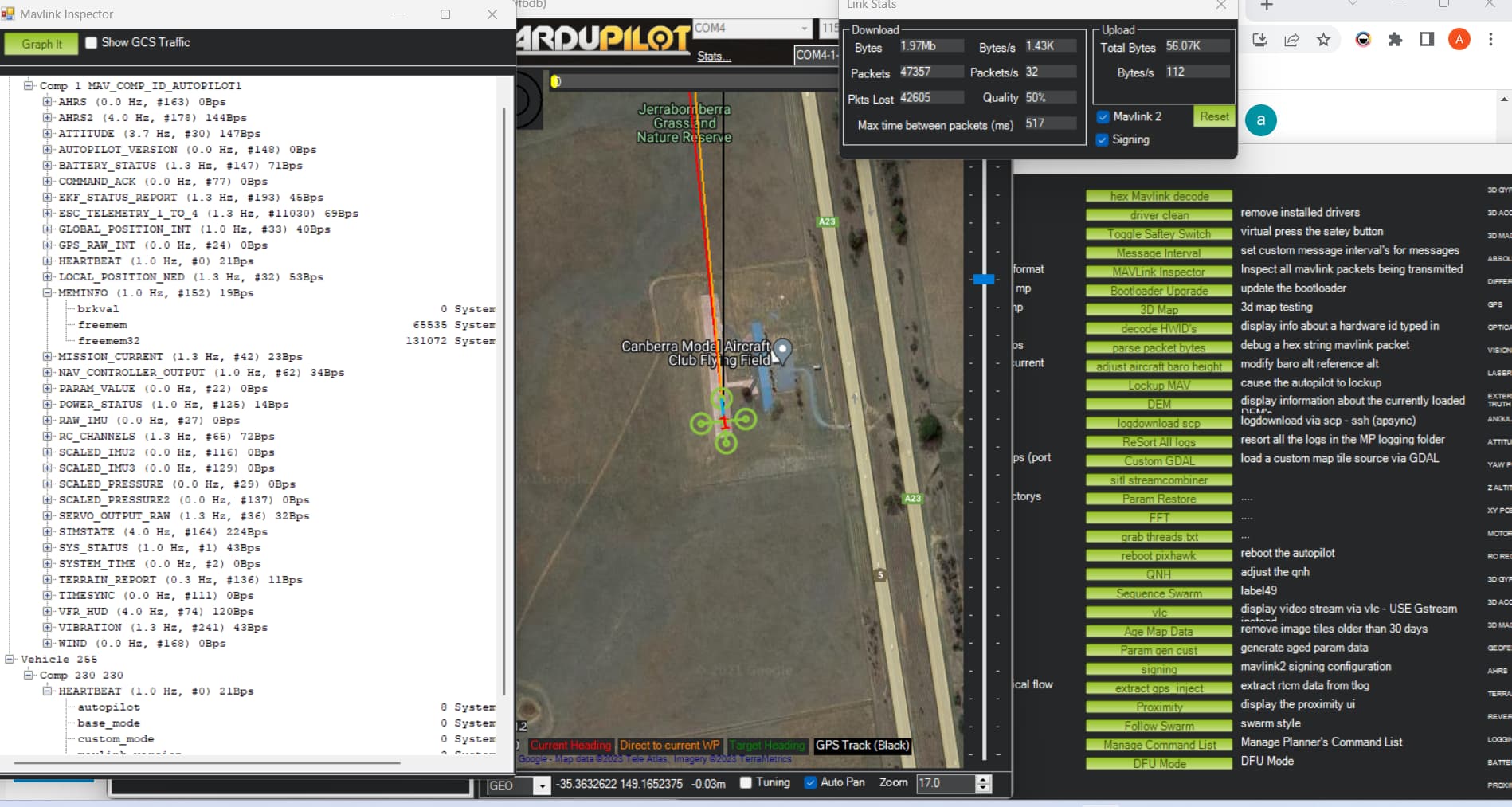
Run SITL(Sim_vehicle.py –console - - map -A - - serial1=uart:/dev/ttyUSB0:115200
) and connect to mission planner
It works but I am seeing lot of CRC errors hence link quality is kind poor(50%)
support 250byte Mavlink , so Mavlink ftp works… i can see the few mavparams files are getting uploaded from SITL to mission planner.