It took me a while to get your joke 
1 Like
Maybe a little off topic, but GPS question…
My GPS lost its config and went back to defaults. Whatever those defaults are don’t work w/ ardupilot… (if I leave autoconfig off, the FC doesn’t detect the GPS) But, in this state, inside my basement where I usually don’t receive any sats at all, I immediately, w/in a minute or so of powering on, receive a lock… The light on the GPS starts flashing. If I let it auto-config, it is detected by ardupilot again, but I don’t receive any sats… And am back to waiting 10+ minutes even outside in an open field w/ clear sky.
Why… Looking at the params in the ublox program, all I am noticing are the baud, and gps mode. (airborne 4g vs pedestrian or vehicle, etc) I’m not sure what the airborne mode does, but that is my best guess as to the difference.
Also, quick continuation to our interference discussion earlier, I just flew directly over the walmart (which I don’t usually do, just in case something goes wrong), and the gps started glitching. Then lowered and started losing satellites, and fairly low to the building, lost all sats. It’s probably not legal to cause interference like that, is it? Even my wife has been complaining that when she runs, her tracking app loses her there, and picks up some time later. Although I am not the one to complain with my probably illegal drone VTX.
Well I replaced the FC mounts and took it for a test ride today.
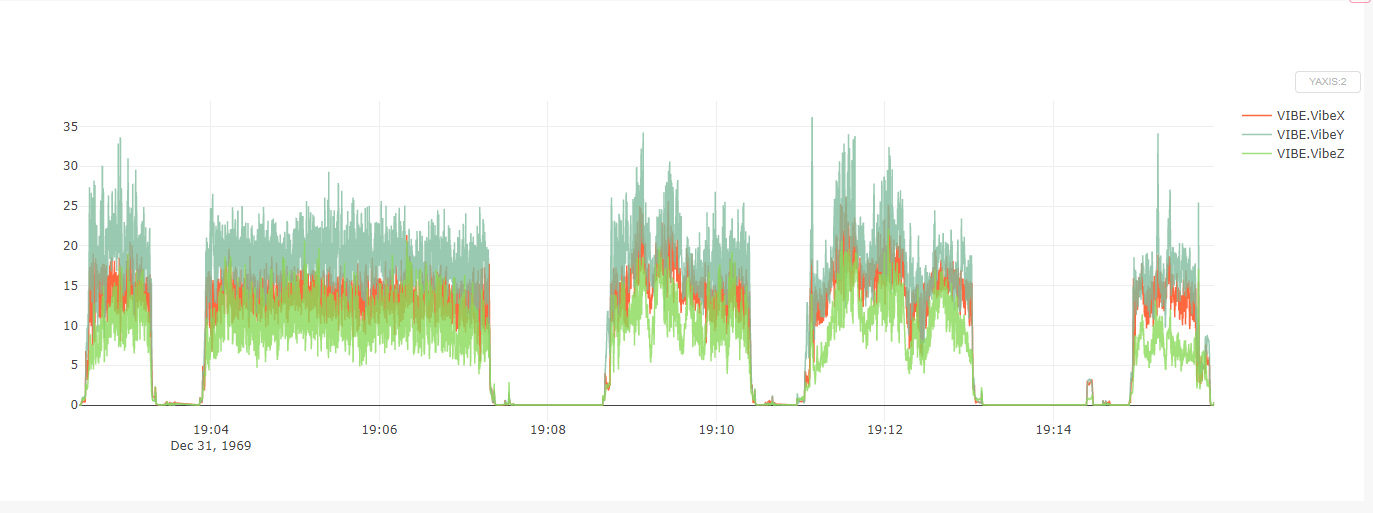
These are the vibes before the FC mount change
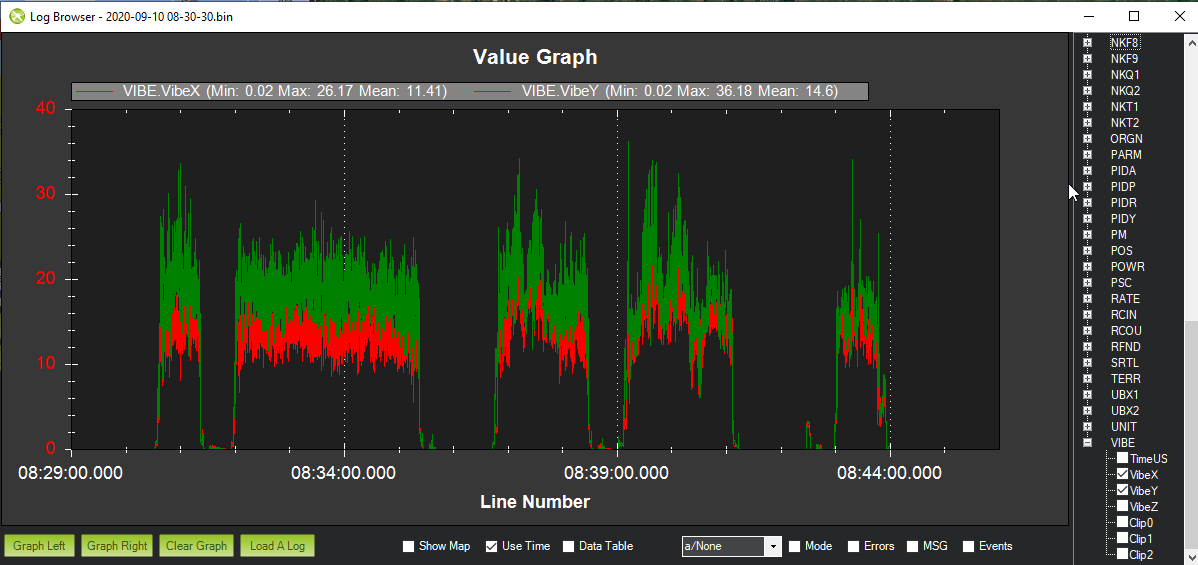
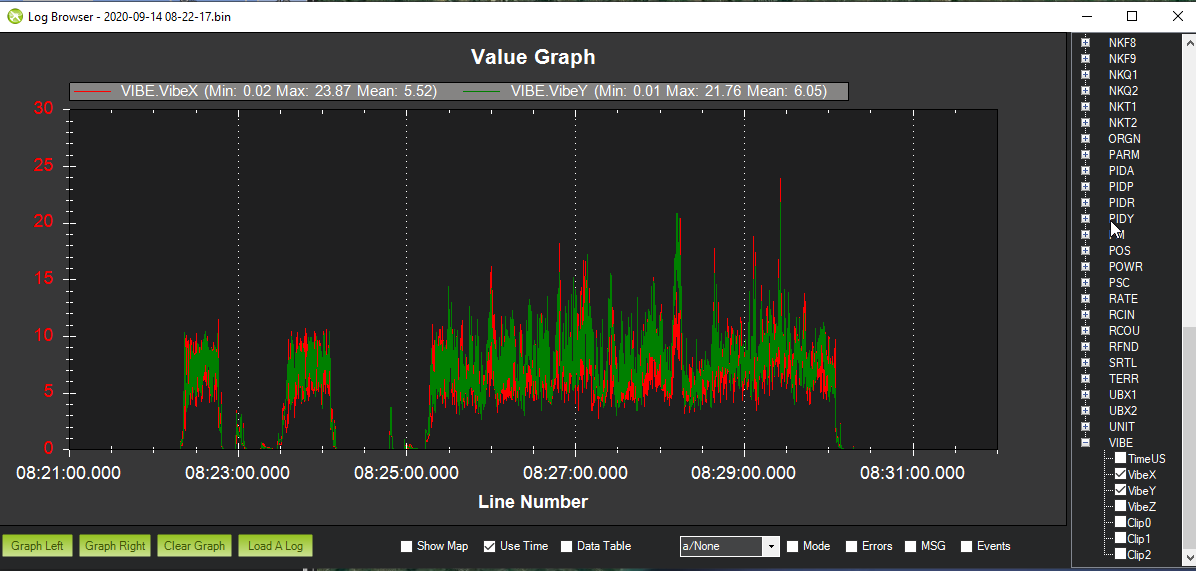
This is after.
Much better.
Still didnt’ resolve the GPS glitch. I still get them so I am guessing its the location I fly at or the GPS.
So will watch your progress @Patrik_Emilsson and see how it goes for you.
I seriously crashed my hexa today so I suspect a parts order is goign to get made. Perhaps a couple GPS are in the future.
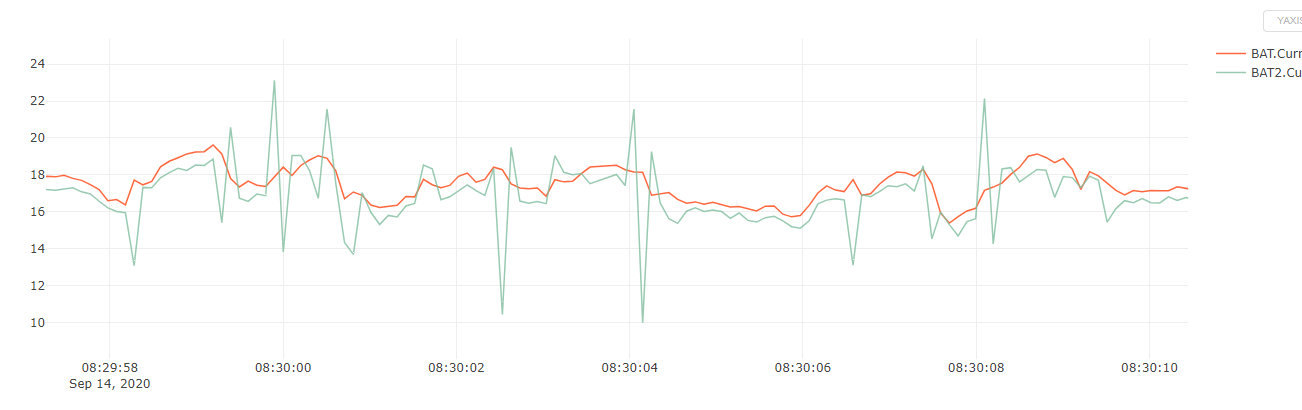
Also my Bat1 and Bat2 current and voltage measurements are nearly the same now.
Current is about .5 of an amp higher on average for Bat1…but I will leave it.
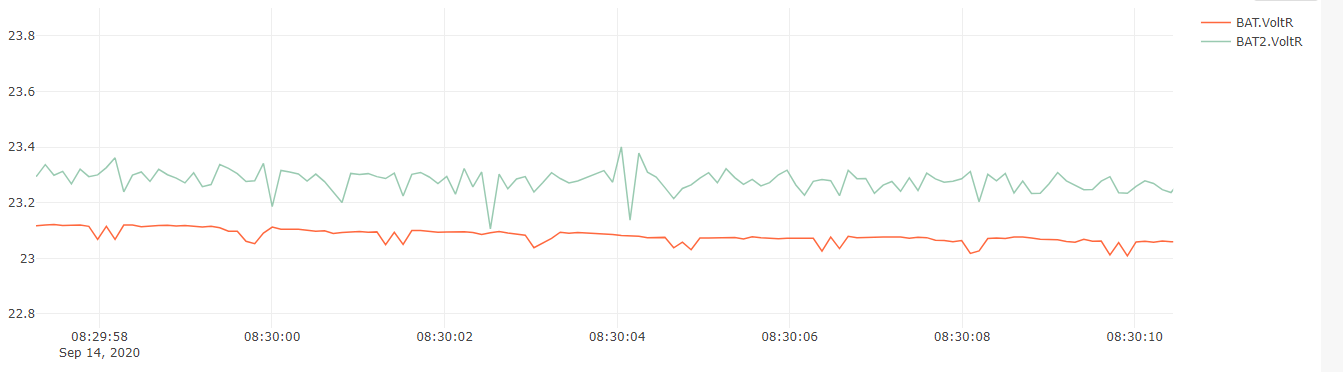
Voltage however needs a tweak
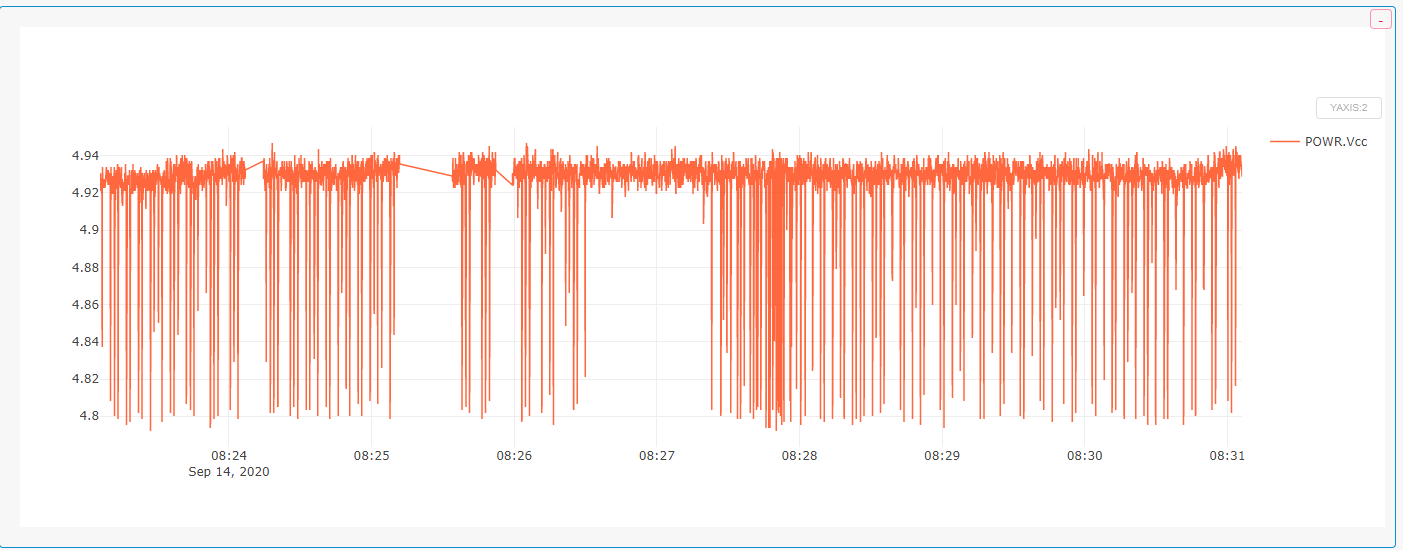
Also looks like I need to move the LED strobe off the receiver as it’s still affecting the FC VCC.
More work to do but getting close now.
Now to figure out why my hexa just hit the ground at a high rate of speed…ooooo it’s bad.
Two more successful flights without any GPS glitches, unfortunately the last flight anyway ended abruptly due to unwise fs setup, dropped dead at fs instead of rtl. No major parts broken but need fix some stuff before next flight.
So it is starting to sound like the GPS is the secret sauce. As for the failsafe…oh ya got nailed a few times on that. But I have now dialed in the Battery failsafe and so not to worried about it now.
But man it’s a lot of work to dial them in.
Yes the gps feels solid now.
Have not made any long run yet as I need to sort out the fs issue. Found yet another way to quickly get it out of the sky today  .
.
But gps have been good.
What failsafe is catching you.
Make sure you’ve got any low voltage cutoff in the ESCs turned off, or set so low it cant interfere, and let the FC handle battery management.
I’m using OpenHD and running RC through that. On ground there is a RaspBerryPi where I connect my Taranis over USB. The issue is that if I get a glitch in the USB it sends out some default values when it recovers that doesn’t match the Taranis actual state. It won’t update the values either until you make a change on every channel on the transmitter. First issue was that this triggered disarm as I had arming on one switch, fixed by using stick arming and an active kill switch instead. After that I started to test a few fail scenarios and found that when recover from USB glitch it send out throttle = 0 and changed flight mode to “stabilized”. This also aborted rtl an instead initialised “hard landing” 
But I’m ready again, replaced the broken GPS mast (flower pin) for the third time, and changed so default flight mode when USB returns is RTL this should keep it in the air and make a nice return independent of radio glitches.
Well I got out this morning.
Can’t say I am happy. More glitches. Time for a different GPS I think.
I have lowered my Vibrations considerably.
This is before
This is after FC mount replacement.
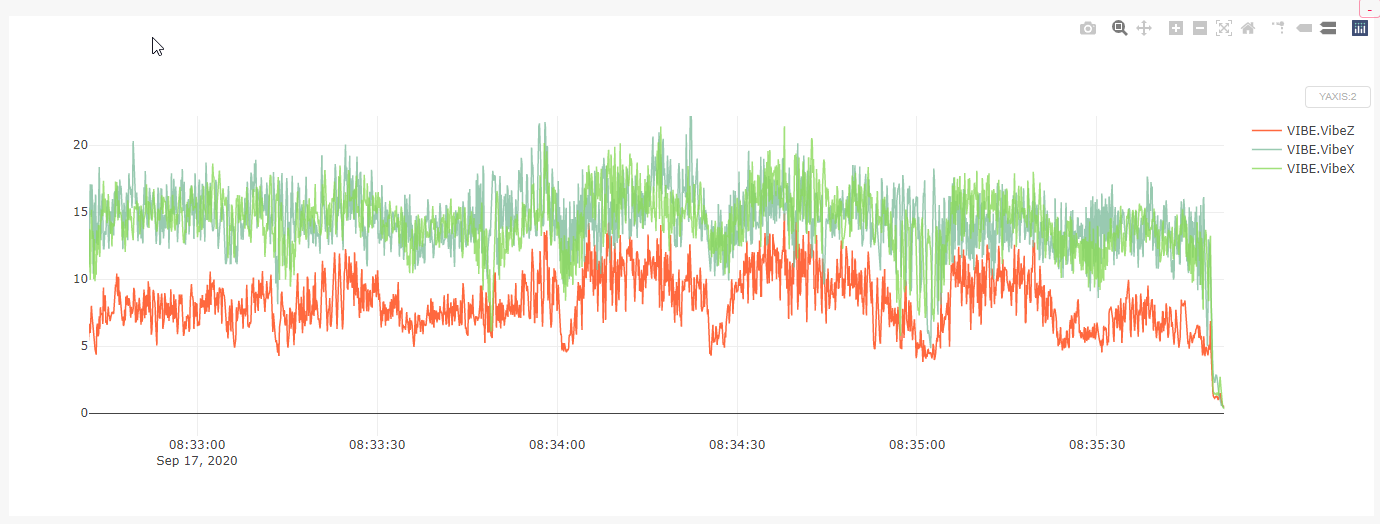
So I have an improvement
But I am also seeing clipping
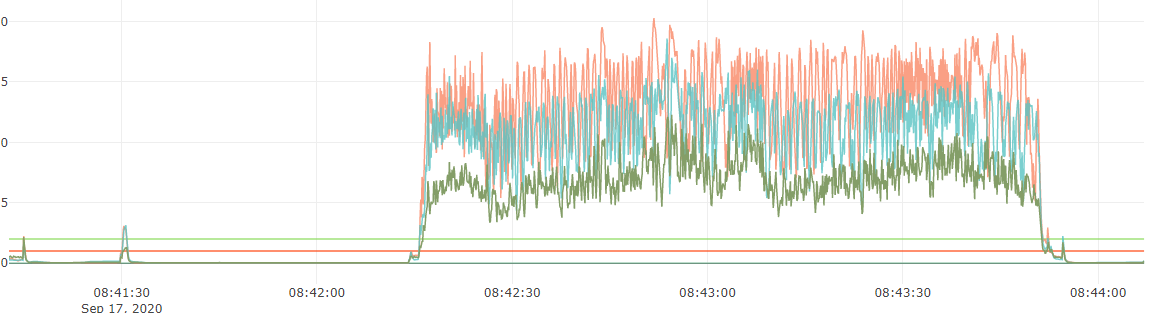
.
Going to focus on Motor balancing over the next few days, it’s the only other item I can think of.
But the vibration reduction didn’t stop the glitching.
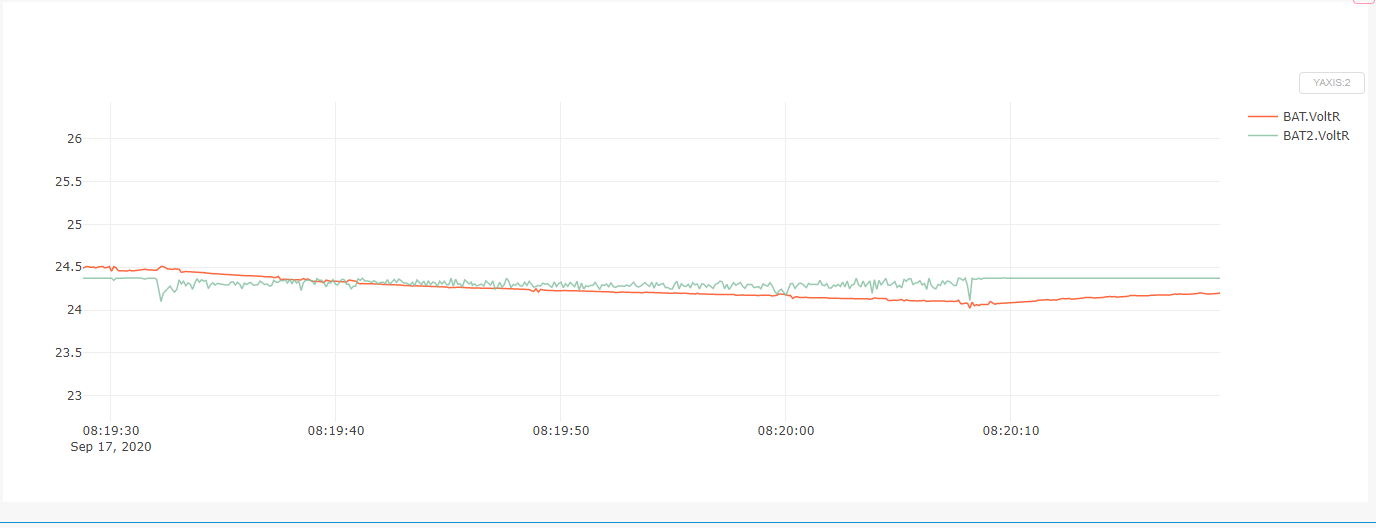
My Battery voltage monitoring appears dialed in now.
This is telemetry versus bat1
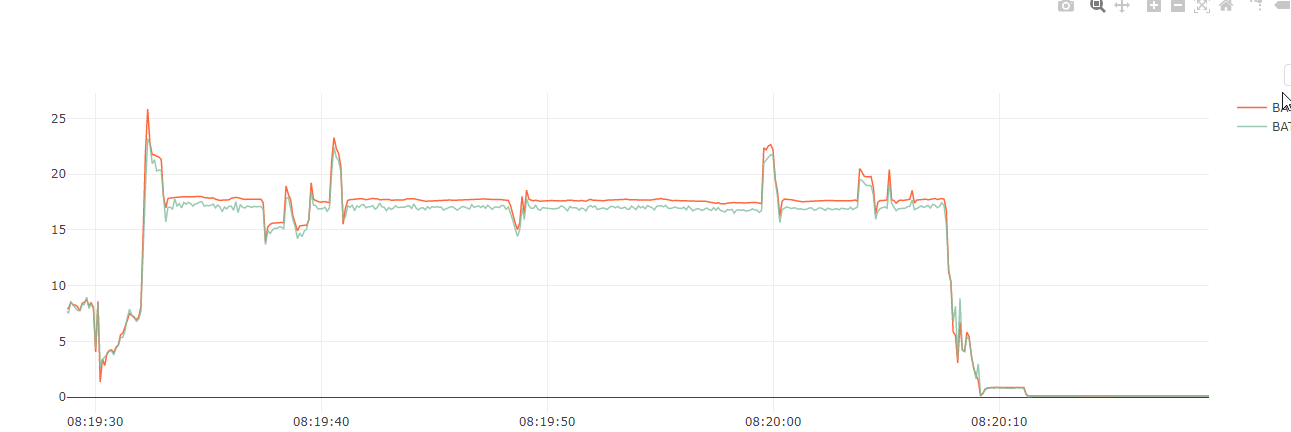
Current measuring seems dialed in.
This is Bat1 current versus telemetry current. Bat 1 should be about .5 amps higher so its pretty close.
I unplugged the strobe and my FC VCC is better…um I guess.
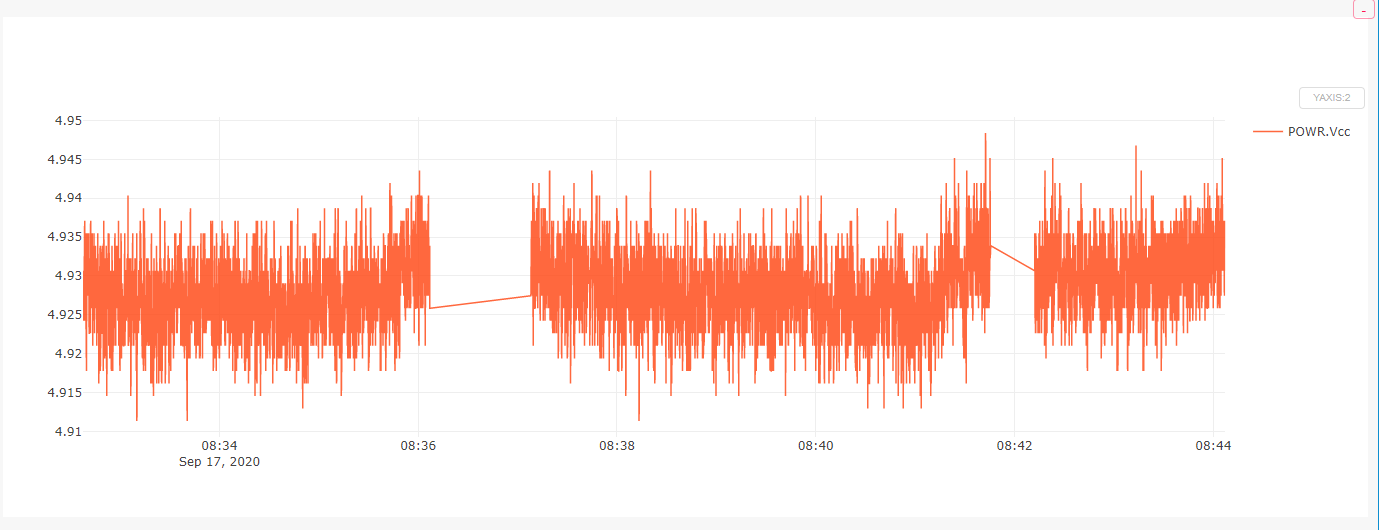
This is what it was like.
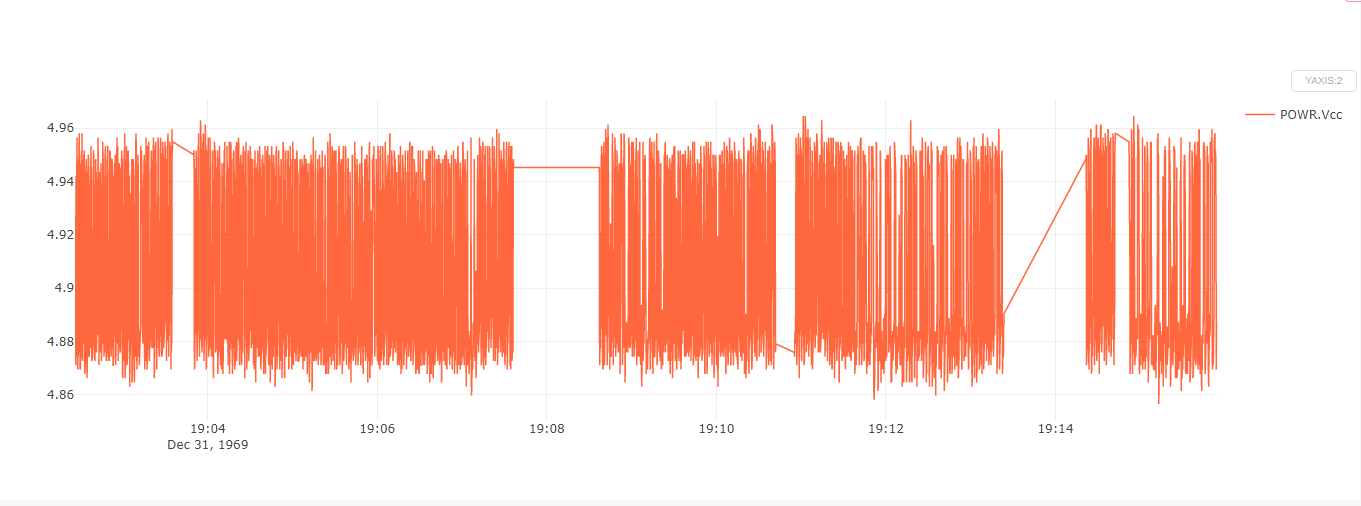
However this is how it was before the last major crash.
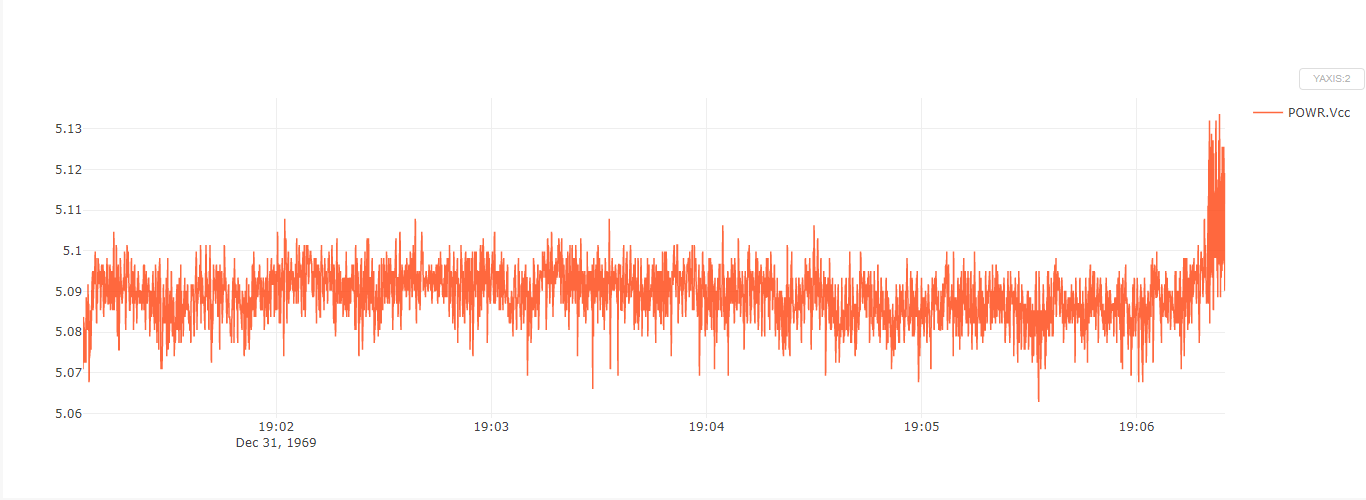
So I think I will replace it.
All in all I didn’t feel good flying it. The GPS glitches means in my mind that the bird isn’t safe. I can’t reasonably rely on RTL as it will likely Glitch in the middle of the RTL.
Today it glitched and drifted off a bit, it was breezy so the wind carried it.
I need better performance then this.
New GPS.
FLash with the newest code.
Balance the motors…
Thats my todo list.
IT never ends
Did a quick check on vibrations per motor on the bench and one motor is noisy. Its getting replaced before she flies again.
The rest of the motors didn’t seem to be badly balanced. Dang.
We’ve got aircraft with vibrations very non-zero but not serious and dont have any ill effects.
Is your GPS position higher up than the prop plane? or is it shaking around too much?
The GPS…why are yo suggesting the GPS…are you thinking that the GPS is shaking and causing unwanted vibration…Yes it’s about the propeller disc.
Also not sure what you mean Shawn about vibrations very non zero. I think you mean there are craft with vibrations like mine with no adverse affect.
I replaced the noisy motor today, just have to check the spin direction.
Also replacing the FC mount. Moving to a wider base version. See if I can improve the dampening.
I ran each motor at 50% and checked vibration…see if there is a motor that stands out…nope. Maybe one has more vibes then the rest but even this is minor in nature.
Ok the motor is replaced. The screws loctited.
The FC mount has been replaced with a wider mount, I hope it helps with the Y axis vibrations.
Motor direction has been checked and corrected.
Props have been replaced with balanced CF props…I was thinking that the old props had to much flex in them and this may have caused vibration.
Lastly I have started putting together an order for a couple GPS. @Patrik_Emilsson seems to be having great luck with the new gps so hopefully it helps me as well.
Could be the gps unit, borrow one from a friend if you have the chance.
No one around here who is a drone pilot that I know…most are racers.
I have the same problem on 2 machines both with the same GPS…and high vibrations.
So I am replacing the GPS and working hard to get vibrations down.
Hi do you have another GPS of the same kind, read someone else that had glitches that solved it with having two. Today I will make a longer flight to see if the good performance I’ve seen still is there
1 Like
Had my longest flight today with my new GPS, approx 2km round trip an no glitches at all . It wasn’t the best condition either, hard wind from the side, copter was almost at 45deg to keep heading but looking at the log the variance on position and compass was low the whole flight.
When I first started I did a compass calibration, has proven to be also a good ingredient to success.
I also have solved my fs issues so right now I very happy 
Hey good morning @Patrik_Emilsson
I am really pleased to hear it is working well for you. I have looked into the purchase of a couple of those GPS. I just need to save up a few pennies first.
As for the suggestion of a second GPS. I had considered that. The problem is that right now the quad is using a pixracer and UART ports are hard to come by. I have a few spare so adding one in physically might be doable…but the connection is a problem. (ESC Telemetry, GPS, Mavlink Telemetry) IF I had a small can port type GPS that might be possible. But as it stands today I don’t.
However I have read that the Debug port has uart…so maybe.
The hexa I think has one spare UART so perhaps I could try on that. Of course it needs a complete rebuild after that crash so right now it doesn’t matter. lol
I printed up the GPS cover just to get a feel for size. Wow thats a huge GPS. Can’t say I am to happy about the size.
My hexa is clean looking and the big gps would be a bit of an eye sore…but I may have to suck it up.
If I could get the Debug port to work and see the GPS I would have a second gps on board…but no go