Hello people, i actually posted this question 14hrs ago in copter 4.0 platform but didn’t get any response. Since my copter version was 4.1.5 i’m reposting here.
So, I encountered GPS glitch at the time of RTL and the drone cruised with a speed of 64kmph which was nearly twice the limit set. It was so fast that I couldn’t recover it after crash land the same day, I found it the next day. I have attached respective log. FYI I use 4S batteryfor my quadcopter and total air time of the drone over a span of 2 months was approx 50Hrs. It is a first for me regarding GPS glitch and surprising that it cruised with speed of 64kmph which was twice the limited speed.
In the log, sat count was decent 15 when the GPS glitch happened and HDOP was less than 1 to be more precise it was 0.67 when the glitch message came. Can someone help me out with this issue.
There appears to be no RC control at all, just guided mode. It is my opinion you should have an RC controller as a backup, or at least allow the copter to complete an RTL without interference if anything goes wrong.
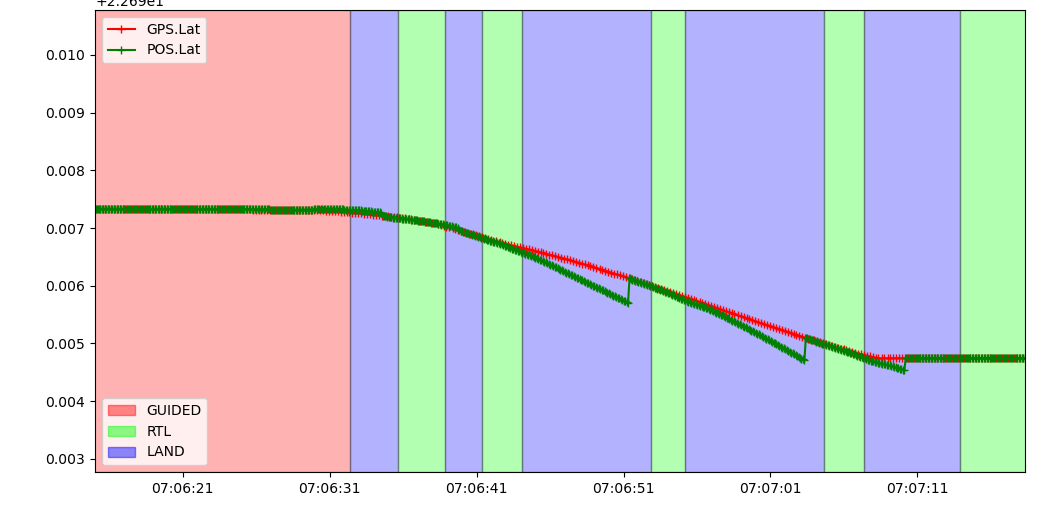
When it first changed to RTL it headed in the correct direction of home, it seems like you changed to guided mode and sent it off at right angles into a field. There was definitely some sort of GPS error (I cant tell exactly what went wrong) but GPS position and IMU-calculated position started to deviate in a couple of stages. The message “GPS Glitch” only came later, after positions had been disagreeing for some time.
Due to the EKF errors the copter kept trying to land, then recover a bit and switch to RTL again. I’m not sure if you were repeatedly trying RTL mode or what…
Multiple attempts at RTL failed after that due to loss of position. Eventually the copter got to land (crash) by itself after (probably) hitting a tree.
Maximum GPS speed recorded was 10.2m/s in RTL, higher speeds recorded after that in the whole RTL/Land/RTL/Land/… mess were probably the result of poor GPS position rather than actual high speeds.
It seems you might have a “pixhawk 2.4.8” or similar and there is only one IMU. I could not find any issues with that IMU but a better flight controller with some redundancy would be advised for long missions and guided mode. Another IMU (and more EKF lanes) would give the copter a better chance of recovery from errors.
Try a GPS firmware update, see if that helps.
Check all your connections and wiring. Measure the +5vdc at the GPS unit.
Often bad connector contacts are fixed by just unplugging them and plugging them in again.
You get a good visual of the position by selecting the map in the MissionPlanner log browser.
You can see how the red and blue lines start diverging after that sharp turn near the road, and there are several aggressive changes to IMU calculated position before meeting trees.
To summarise it may be there is nothing wrong with the GPS unit itself, but the flight controller could be replaced with something more reliable. The GPS messages may just be pointing out the inconsistency - the IMU changes are sort of subtle and I couldnt see any glaring errors, but maybe the IMU is going bad - I’ve seen it happen before.
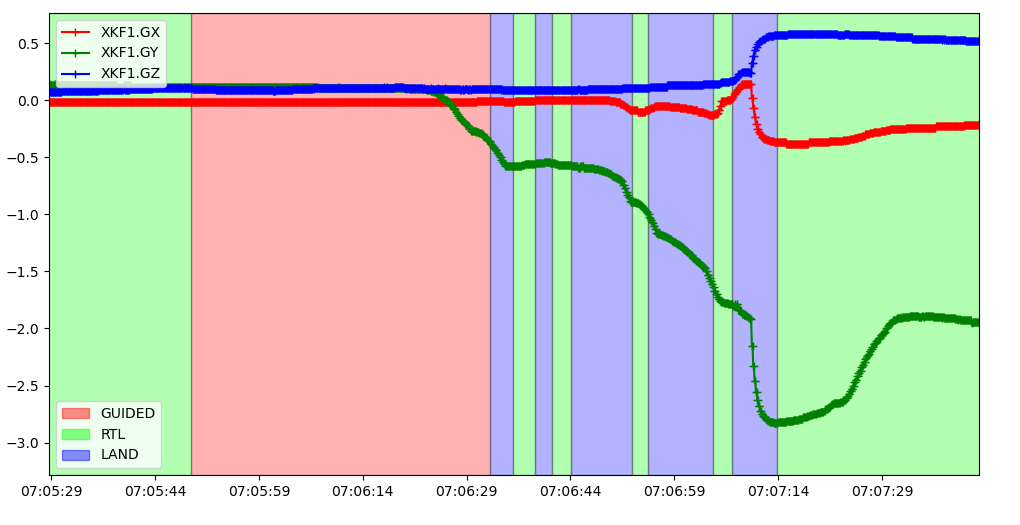
In the log there’s IMU accelerometer and gyrometer data under “IMU”, and the GPS latitude, longitude, speed under “GPS” plus lots of EKF data under “XK…” headings.
If doing long flights you should really have a ground station where you’d be able to see the position of the copter at all times. I couldnt understand how you would be using guided mode and not know where the copter ended up
As I see GPS was OK. Your single imu went haywire, and the Gyro Y Bias started to increase, which caused increased speed error in the EKF estimation. In cases like this normally EKF switches to a second imu, but with a single imu your copter did not have any chance.
Thank you for your replies @xfacta and @Eosbandi. I will test gps and try changing flight controller.
One observation was that flight controller parameters were set to default from what was pre-defined. What if the parameters might have changed mid air which caused GPS glitch. I’m reading about it whether that might be the case. If someone knows more about it please write below
Nope, the only way to reset the parameters is an old bug, but that happens at boot. Not inflight.
And there is no indication of midair reboot or param change in the log.
Thanks @Eosbandi for finding the real cause that I missed but suspected
The issue is the poor quality flight controller, that no amount of parameter changes or resets will fix. The IMU hardware is giving problems. More flights with the same flight controller will be inviting disaster - I can tell you from experience.
There are plenty of low cost reliable flight controllers available now, that are small and light and some have multiple IMUs, such as:
Omnibus F7
Holybro pixhawk 5 or 6 series
Mateksys H743
mRo (various)
CUAV V5 Nano
It’s important to ensure you are buying the genuine article too, and not some cheap copy.
Remember to check the map of that flight too, as I pictured - the GPS course is always reasonable and it is the IMU that deviates in radical unrealistic steps. Where you see the message “GPS glitch” that is just a warning to let you know those paths are deviating, not necessarily that the GPS is at fault.