Hello,
I am having a weird sudden issue with my pixhawk. It is very unstable and therefor not trustworthy in loiter mode. The quad will hover and fly fine in stabilize but when I switch to gps its all over the place, so bad I have to switch to stabilize again. I just did one flight where it was bad off the bat, and then one where it was fine for a few minutes but then started acting crazy again. I did the auto analysis of the log but it didn’t pick up anything. I have included the log file maybe someone could please take a look that can read these better than I can? I will try to brush up on how to better interperet the logs but I could really use some help now. Actually it says the file is too big, heres the google drive link to download it. Thank you in advance much appreciated.
Please describe “its all over the place” in as much detail as you can. Posting a video will be a great help.
It starts to move back and forth violently. Almost seems like the correction for the GPS is too much and too aggressive. I actually ran an auto tune on it yesterday and it seems to be better. I upgraded camera gimbal from a Walkera g2d to a 3 axis and it’s aluminum and a bit heavier. I think maybe it added too much weight hanging off the bottom than the previous I will fly it a little bit and see if it helps it
Hi, the following I have seen from the log where I would focus on:
- ATC_INPUT_TC = 0.4166666567325592. this is very soft reaction to the FC input. I would use 0,1 to have more sharper response to your input
- don‘t use the onboard compass and recalibrate external compass
- although vibration is quite low, your imu 2 is much more noisy than imu 1. Try once to not use imu 2 and see whether this has an impact.
- try once althold mode and see if flight stability is ok. In this mode GPS is not used.
I strongly disagree with #2.
Certainly the offsets for the internal compass will be higher than those for the external compass. but the numbers are called “off sets” because they are used to adjust the magnetometer outputs to off set magnetic interference from the Pixhawk electronics. I have 4 Pixhawks. I calibrate both internal and external compasses and I have never had any bad issues.
Additionally, I seriously doubt this is compass related. If it were, the aircraft would either toilet bowl or fly-away and (if the description of the behavior is accurate) the aircraft is doing nether. In fact, the air craft is moving “back and forth,” which would indicate an issue with pitch (nose up/nose down).
Based on that, and taking into account that a heavier gimbal/camera was added, I would simply remove the gimbal and go fly. If the aircraft performs as it should, then we know the gimbal is the cause. If the aircraft remains unstable then we need to look at aircraft balance, motor alignments, and roll/pitch tuning.
Your quad is overweight/underpowered for a start.
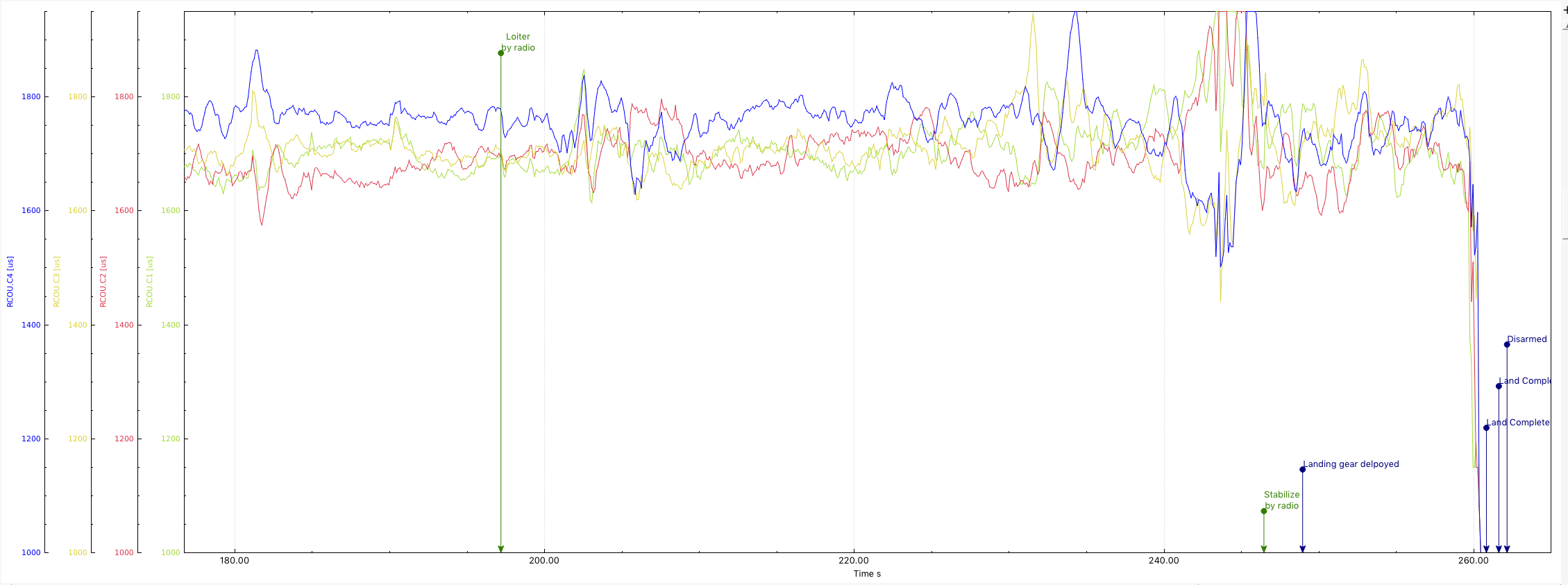
And what is with the discrepancy between motors 2 and 4?
I would check why 4 is working so much harder than 2.
Your term
is purely subjective.
Have a look at your Actual to Desired Roll/Pitch/Yaw
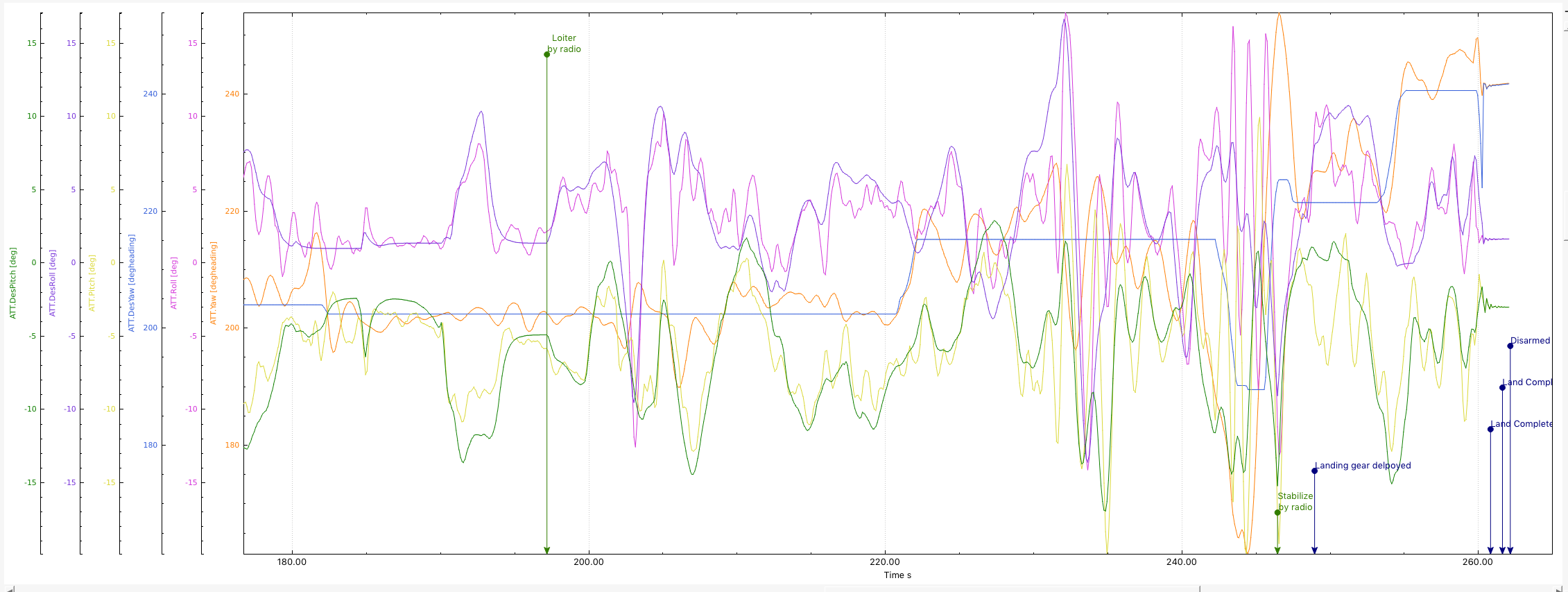
I would take @oldgazer1 advice, remove the gimbal and see how well it flies.
If adequate, then you could do an Autotune, which is what it desperately needs.