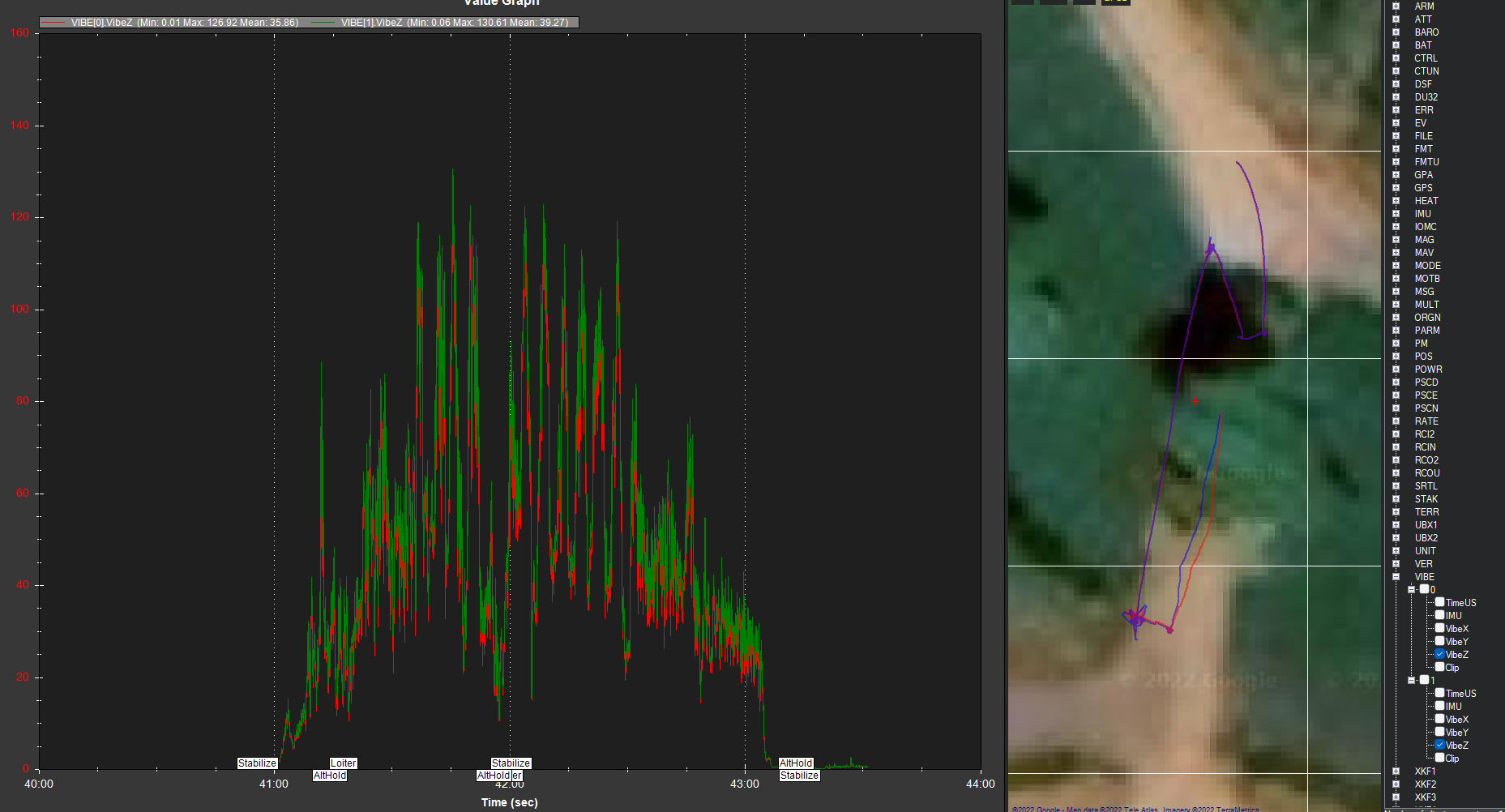
I have a hexacopter with a holybro 6C, T-motor MN5008 antigravity motors, Hobbywing Rotorx pro 40A ESCs, Holybro F9P RTK GPS with a tarot frame. The issue is that when we increase the altitude, first an gps/compass glitch comes , EKF lane switch happens and vibration compensation also turns on making drone fly away while gaining sudden altitude jumps.
The issue is that this only happens in hill areas with medium winds and we tried to diagnose through log analysis, changing GPS hardware, adding EMF shielding but with no success. I have attached the logfile below and if anyone can shed a light on how to solve this, I would be much grateful.
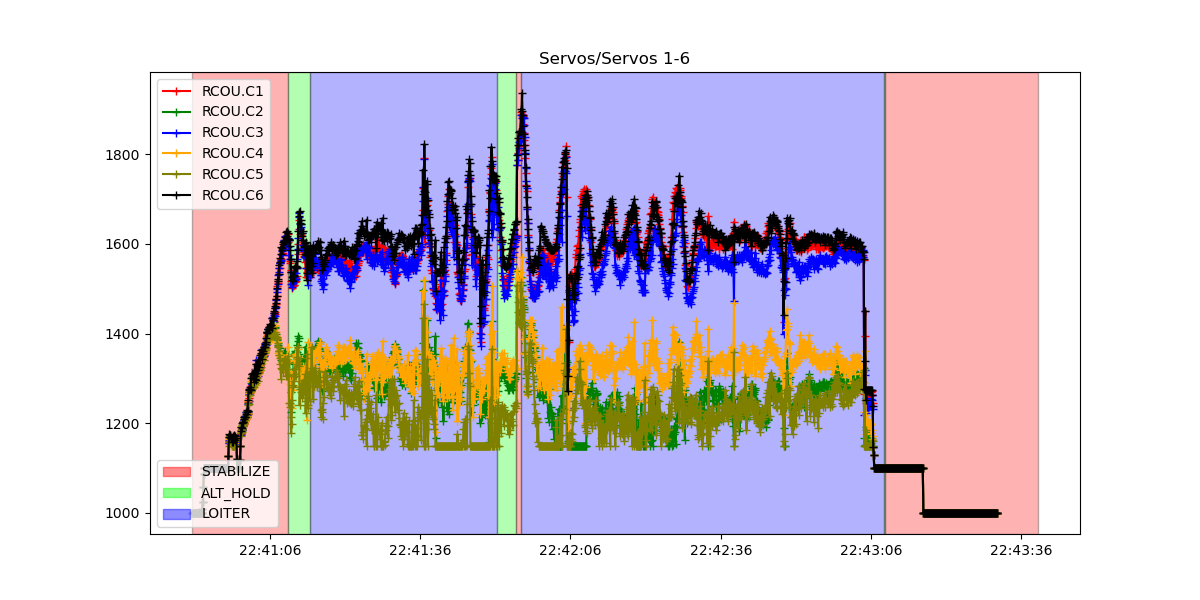
I agree, the vibrations need to be fixed. But there’s also a major twist in the airframe. The CW motors, 1,3,6 are working significantly harder than the CCW motors. Make sure all the motors are level and parallel.
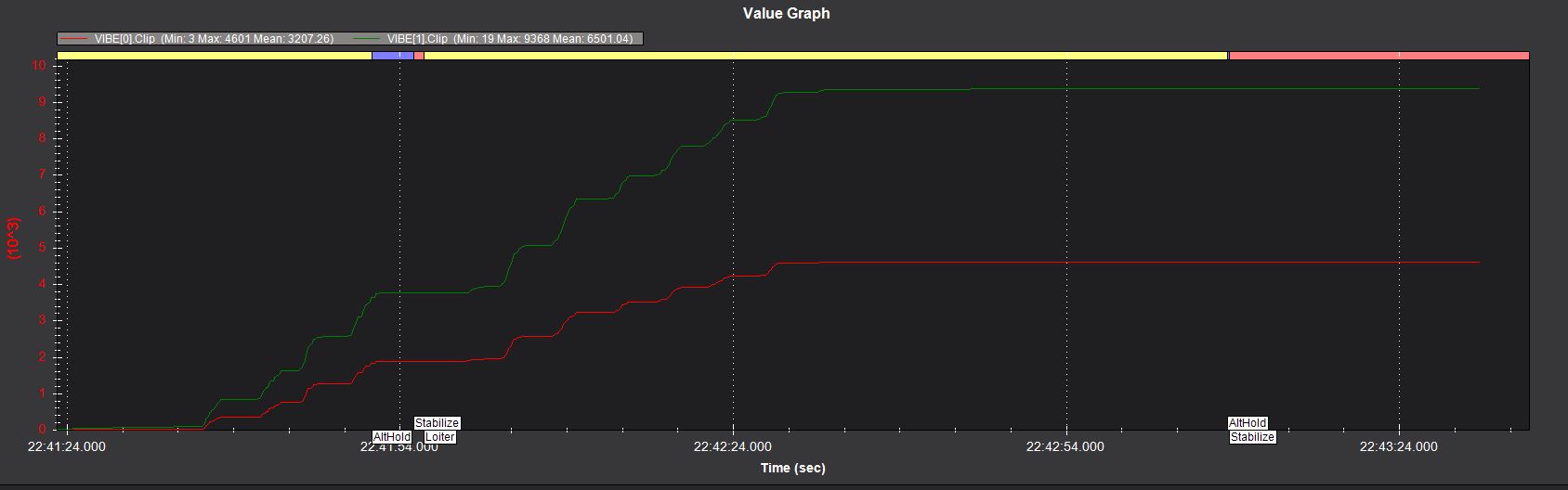
Your Hexacopter “The Clipper” is going for the record. Almost 10,000 accelerometer clipping events on IMU1 which it switched to because IMU0 was so high.
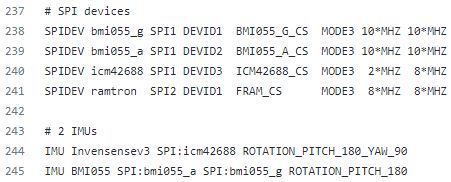
That’s a good question, I noticed that too. INS_ENABLE_MASK is set to All but only 2 have ID’s. Seems like I saw some posting abut that with these 6’s on the forum here awhile back.