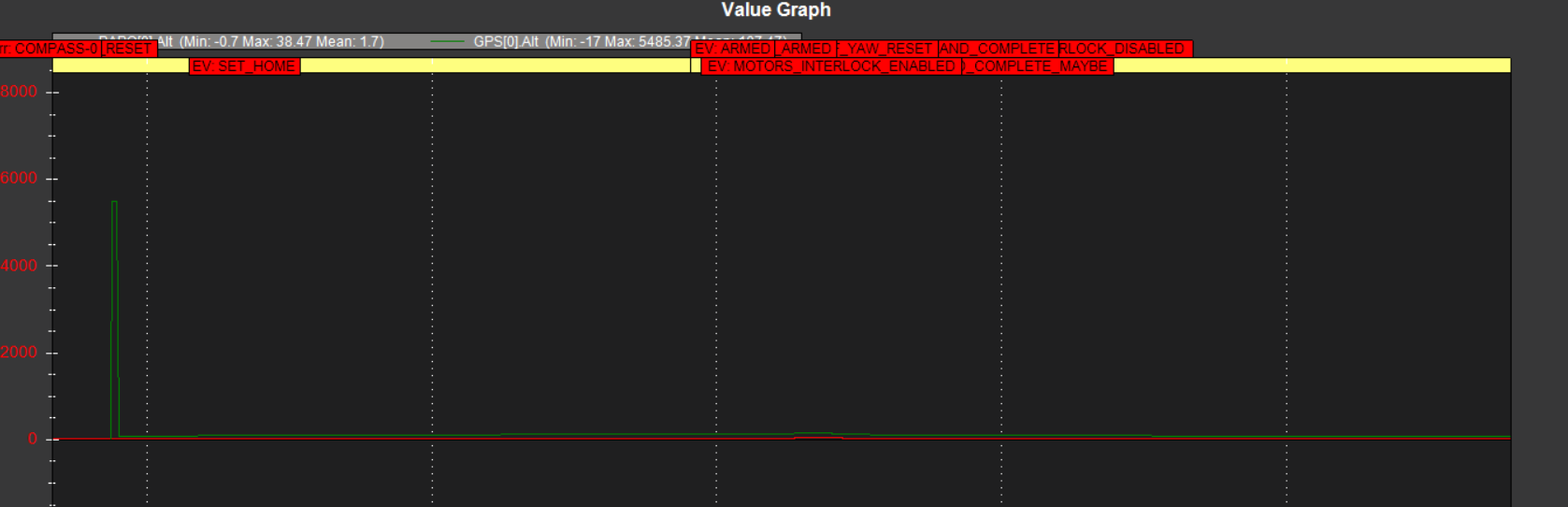
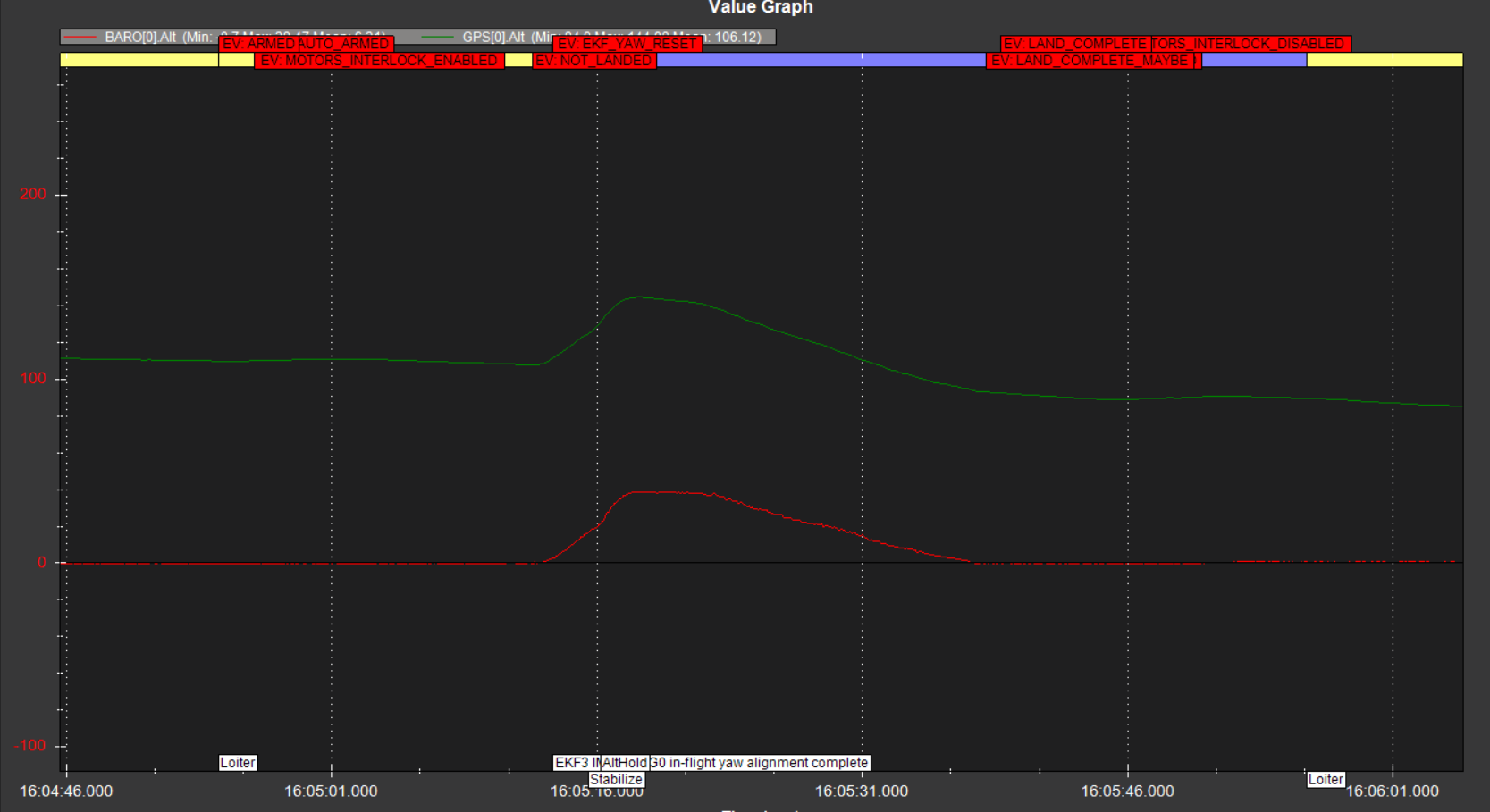
I have a problem with my drone at Loiter mode with altitude, as you can see it skyrockets and it does not decrease altitude in Loite mode (I have to change stabilize mode). I saw a disaggreement in my log data about Altitude between GPS and baro sensor (by the way I think, this is sea level altitude difference at my location). Is this reason for this misbehavior? How can I correct it?
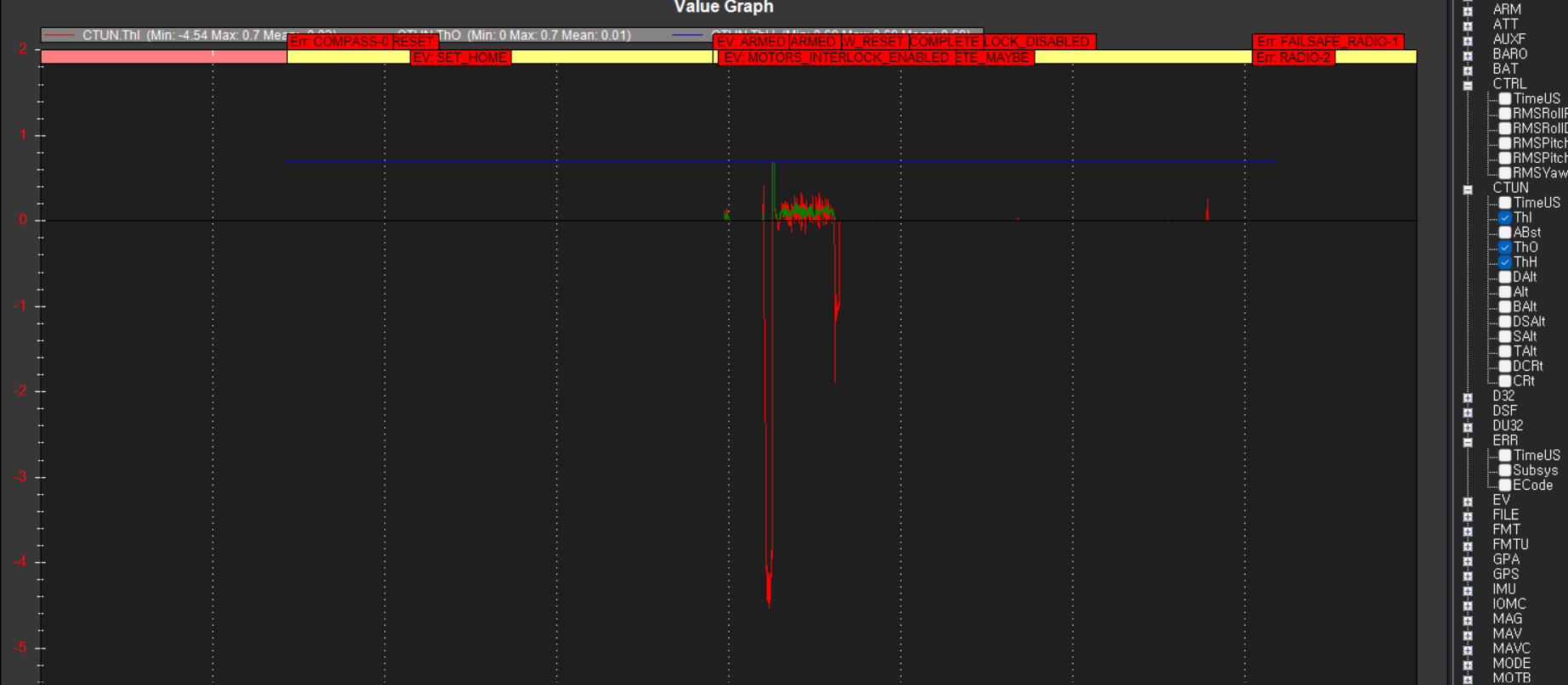
I am searhing more log data and I see these graphs about throttle, blue is throttle hover (which seems very high I think), red throttle input and green throttle output, as you may see initially it was loiter then it launched really high and change to stabilize to bring back (in loiter did not repsond in putting down throttle). Is it normal throttleIn to be negative?
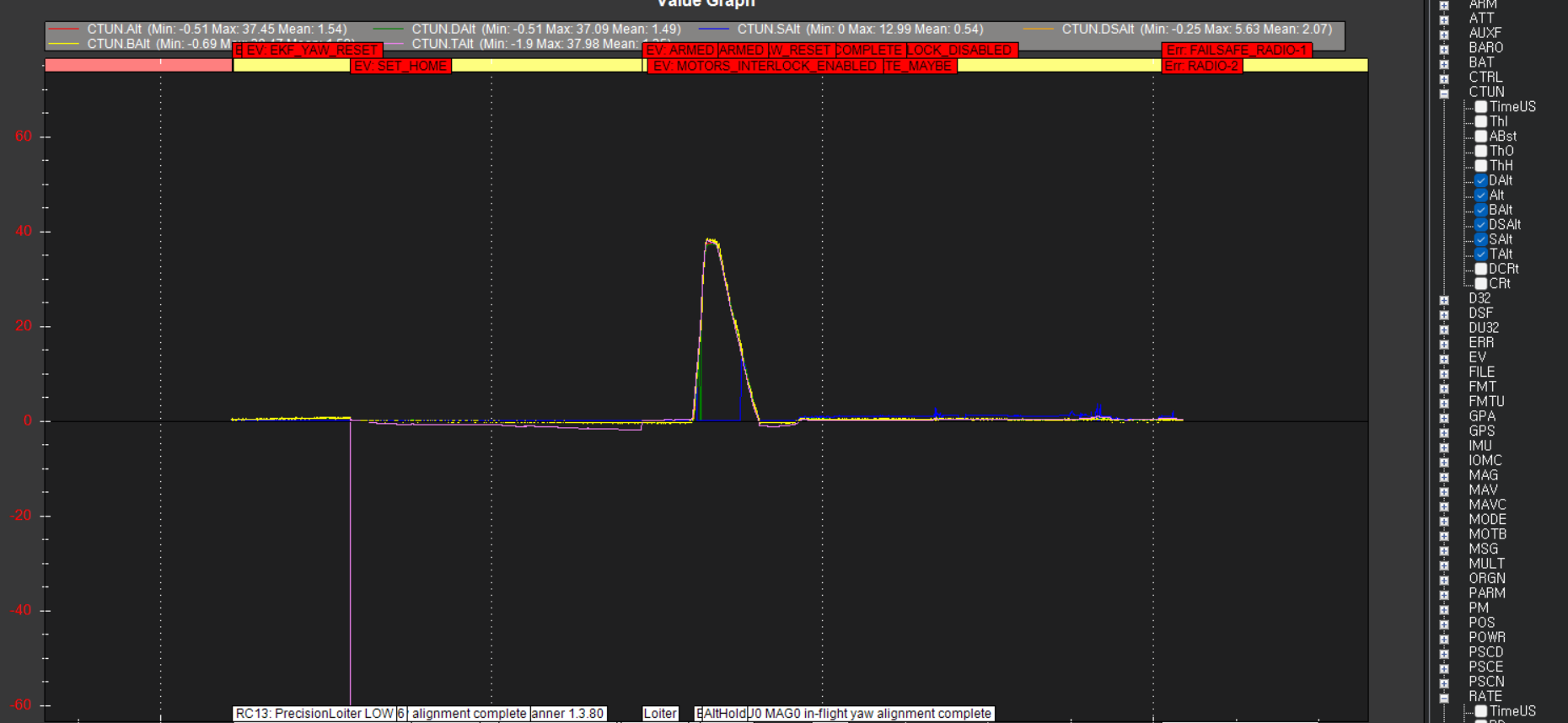
Just a little bit up thrrotle stick set desired altitude to 40m. I wanted 4 not 40m. There is a Lidar rangefinder as you may see and also the terrain altitude is changing instead of being nearly steady. I start believing something is messing up with terrain altitude (the morphology of terrain is nearly level).
Thank you for any help.
If you need extra variables it is the same bin as above