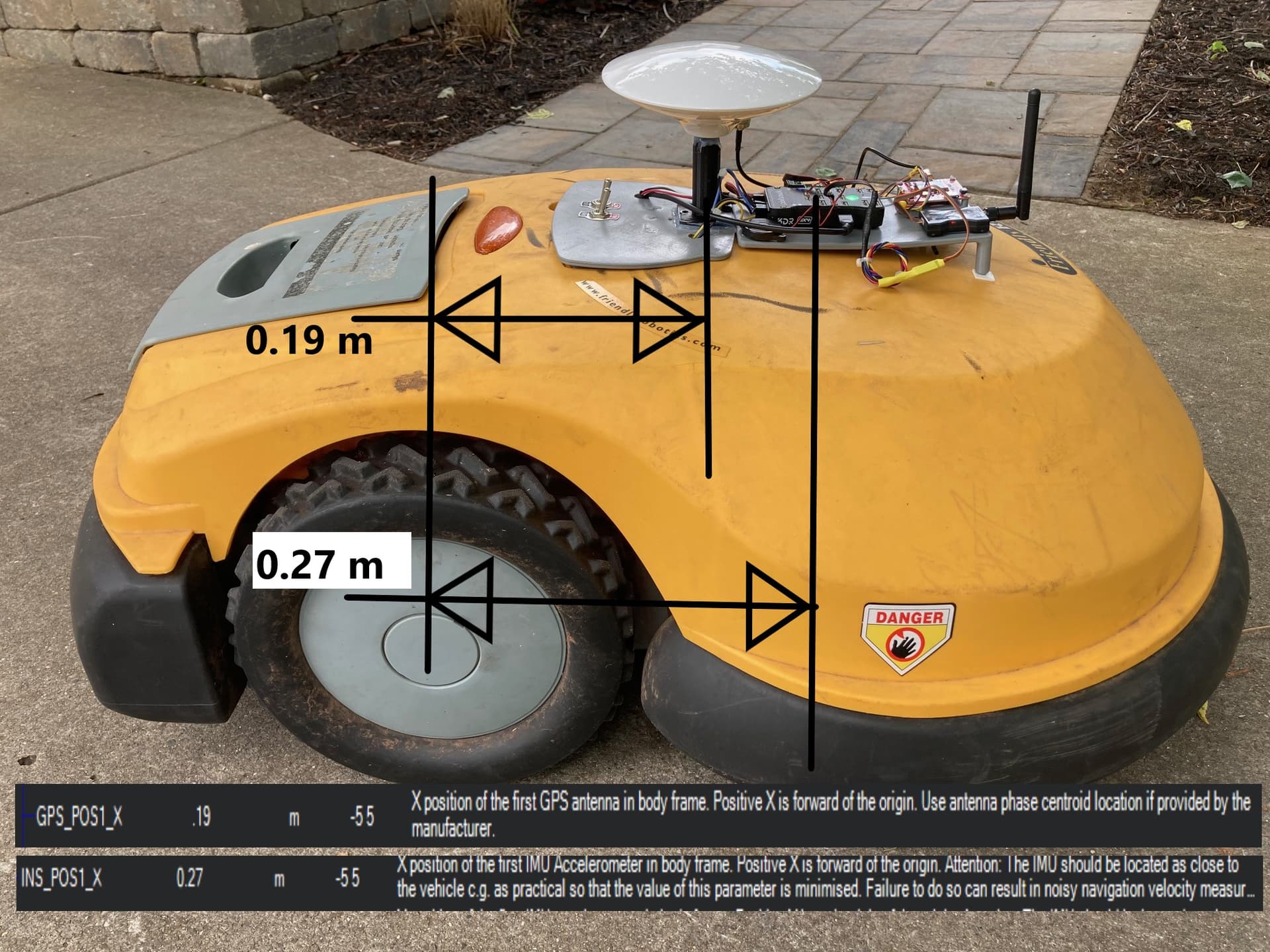
I’m struggling to tune my Robomower RL500 with a Pixhawk 1 and F9P GPS. I can tune the throttle and steering to closely match the PID desired but can’t seem to get the ‘wiggles’ out in auto. I want to make sure I’m setting the GPS and INS position. Below is a photo that describes my setup. Is this correct?
Thanks