Hi there,
I thought it would be easy to get information through GPIO AUX ports !
I’m currently using Mission Planner 1.3.81 build 1.3.87, ArduPlane V4.4.0 Cube Orange; SCR_ENABLE = 1
In that version BRD_PWM_COUNT doesn’t exist anymore.
My Code tries to affect Pin 2 and 3, and to read it, but unfortunatly nothing happens when I put it to HIGH (3-5V). On the screen I have always “Blue Green = 10” with or without avtivating the pins. (Im using rangefinder on 5-6 and it’s working nicely )
Blockquote
gpio:pinMode(51,0) – AUX 2
gpio:pinMode(52,0) – set AUX 3 to input, gpio:pinMode(51,1) would be output
local Blue = false
local Green = false
function update()
Green = gpio:read(51)
Blue = gpio:read(52)
if not Blue and not Green then
gcs:send_text(0, "Blue Green = 00 OK")
elseif Blue and not Green then
gcs:send_text(0, "Blue Green = 10")
elseif not Blue and Green then
gcs:send_text(0, "Blue Green = 01")
elseif Blue and Green then
gcs:send_text(0, "Blue Green = 11 STOP")
else
gcs:send_text(0, "Aucune correspondace")
end
Hi Yuri, Thanks a lot ! Yes your code is working : the states are changing one by one !
In my case I had some difficulties linked to the fact that I discovered that if you dont force the Signal Pin to “LOW” by linking to “GND”, the state will be “HIGH”. If you leave it alone it’s HIGH… initially I thought that if no Signal it would be LOW but NO.
In my case to be abble to read the signal sent to the GPIO I have set
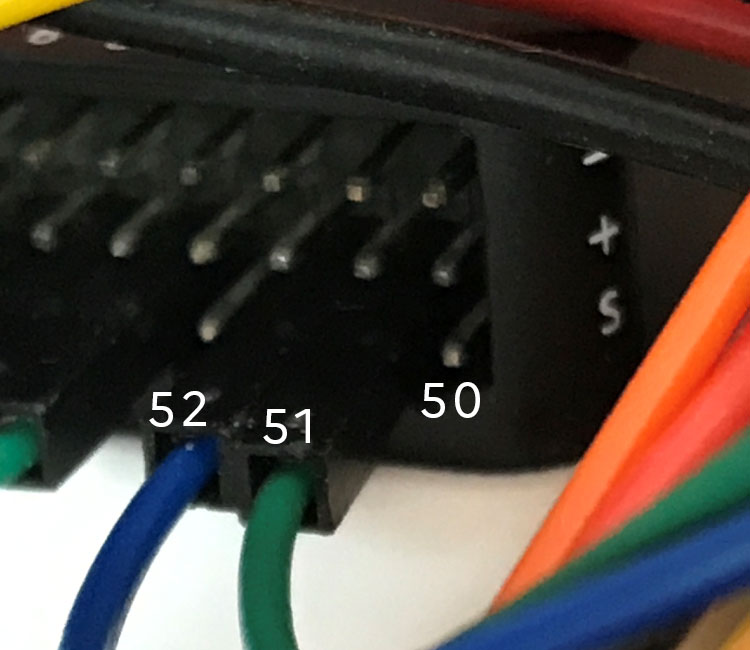
@Yuri_Rage I was planning to use 51 & 52 (see picture)