Finally got my Cube talking to the SimpleBGC and can move it around with ‘point camera here’
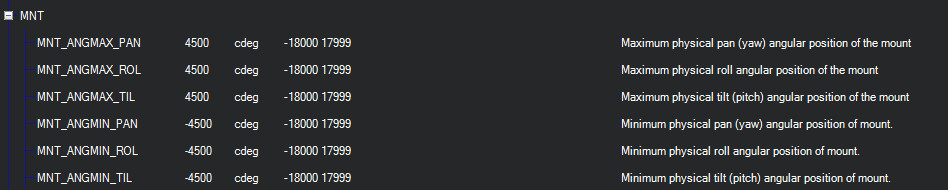
Few questions. Once the FC has control of the gimbal it seems it no longer applies movement limits. As my gimbal is not 360 I dont want it to try to point behind and stretch the wires. How do I stop this? Ideally the frame (copter) would yaw and keep the gimbal angles within limits.
If the camera is consistently slightly off target, how I adjust this please?
1 Like
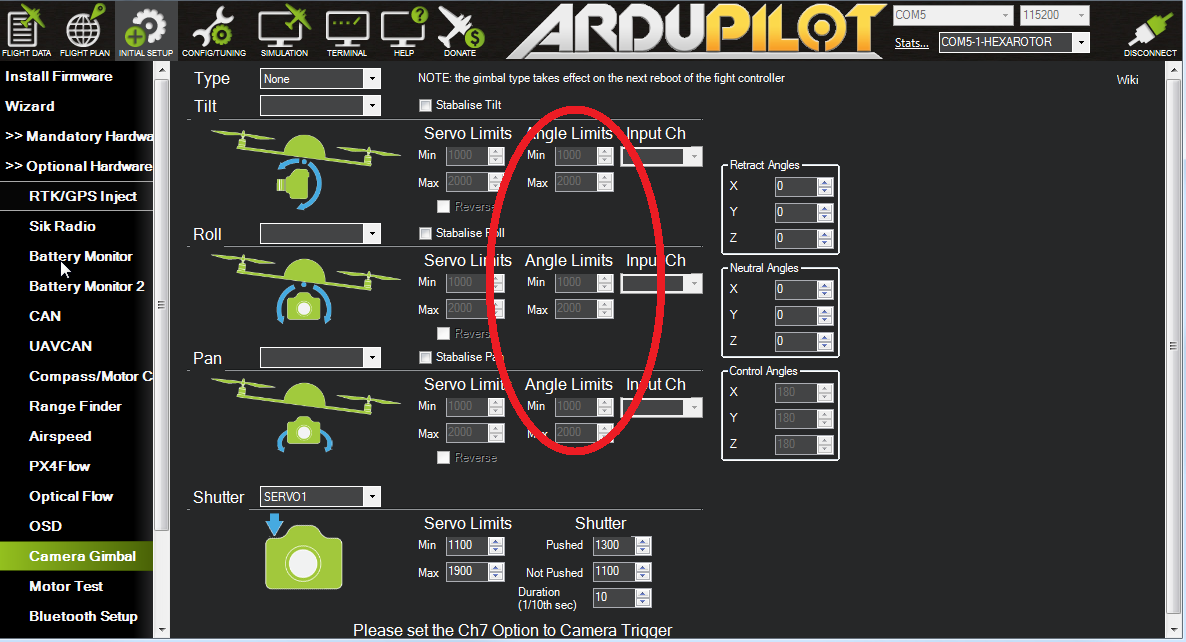
Angle limits (YAW) on the simpleBGC GUI dosent work. As Im waiting for a Herelink to arrive Im not sure if RC channels will be used in the same way? Anyway when the FC has control, if I understand it correctly, the RC inputs are somewhat disregarded. Those limits you highlight only become active if you select an RC channel. As im using serial FC-gimbal Im not to sure how RC channels are relevant.