Hello everyone,
My name is Cristián and I am working in a project to fly a gondola with a camera gimbal to take videos and data for the solar eclipse here in Chile in the next week.
We got everything working so far: pixhawk, gimbal, cameras, dragonlink, live video feed (don’t know how far it will work), and now I am working in the mission with Mission Planner and I run into some trouble.
Just for understanding, the gondola will fly with a weather balloon and the pixhawk only controls the camera orientation (pitch and yaw) towards the sun, there are no servos or motors, just the gimbal. So the mission I am writing is the following:
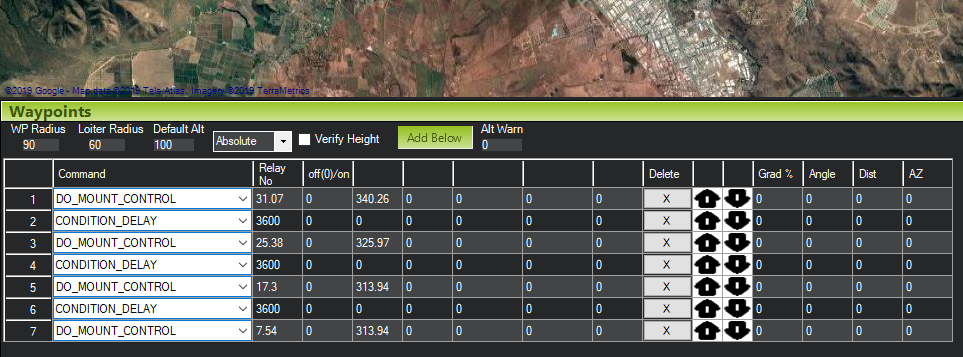
The Idea is to start the mission with the camera pointing at 31.07 / 340.26, then wait an hour and change the orientation to 25.38 / 325.97 and so on.
I tried the mission changing the delay time to 60 seconds (no need to wait for the hour on a test  ) but it only follows the first command and point at the first orientation, after 60-90 seconds, nothing happens, and I don’t know whats wrong.
) but it only follows the first command and point at the first orientation, after 60-90 seconds, nothing happens, and I don’t know whats wrong.
Any help would be really appreciated, this is my first time working with a pixhawk and mission planner.
Cristián
PS. Here is a picture of the gondola, it does look live a satellite