Hi guys
I recently installed RTK GPS on my 550mm quad, and I’m flying in guided mode. When I look at the positions in my mavros log, there’s always a gap between the target set by the pixhawk and the actual position measured using the GPS. I would like to improve upon the accuracy, making the drone hover closer to it’s commanded target.
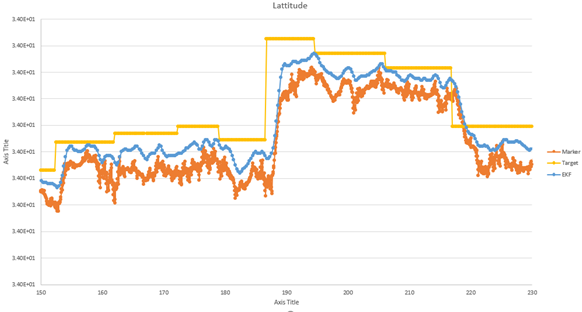
In this log, each horizontal line is 20cm. The orange is the GPS, yellow is the target commanded in guided mode, and blue is the EKF result.
How should I tune the parameters to 1) make the EKF coordinate line up better with the target, and 2) have the EKF line up better to the GPS reading?
I believe EK2_POSNE_M_NSE forces the EKF weigh the GPS more, helping the GPS and EKF align better. I think increasing PSC_POSXY_P will make the EKF align closer to the target. I’m I right? Also What other parameters should I change? Please share your experience.
Thank you!
Ash