Hi guys I bought a drone from a guy that built it himself and was flying it, everything working well. One day when I went to move the throttle sideways to the right as i do to arm it, the drone did not arm. I can tell that it is armed when the blue and red lights start flashing on it and then turn solid. I have downloaded mission planner and I downloaded APM copter v3 4.5 quad onto my drone as i plugged it into my computer. Now when I plug in the drone it just starts beeping constantly and I am not sure what to do. Any help with getting the drone flying again would be much appreciated.
Thanks
Is it a Pixhawk or an APM?
From your description you are running an APM 2 something.
The latest firmware you can load onto that is v3.2.1
That would explain why you are getting strange results.
The APM is an 8bit processor with limited memory so the Firmware feature set had to stop at 3.2.1
The Pixhawk is 32 bit with more memory and can run the latest firmware.
I think it is APM on it it says Arducopter that is the only markings besides the ports I see on it
Alright thank you how do I get a less updated version when I click on it it only gives me the newest option and then starts to download it .


Definitely the APM mine looks almost exactly like it
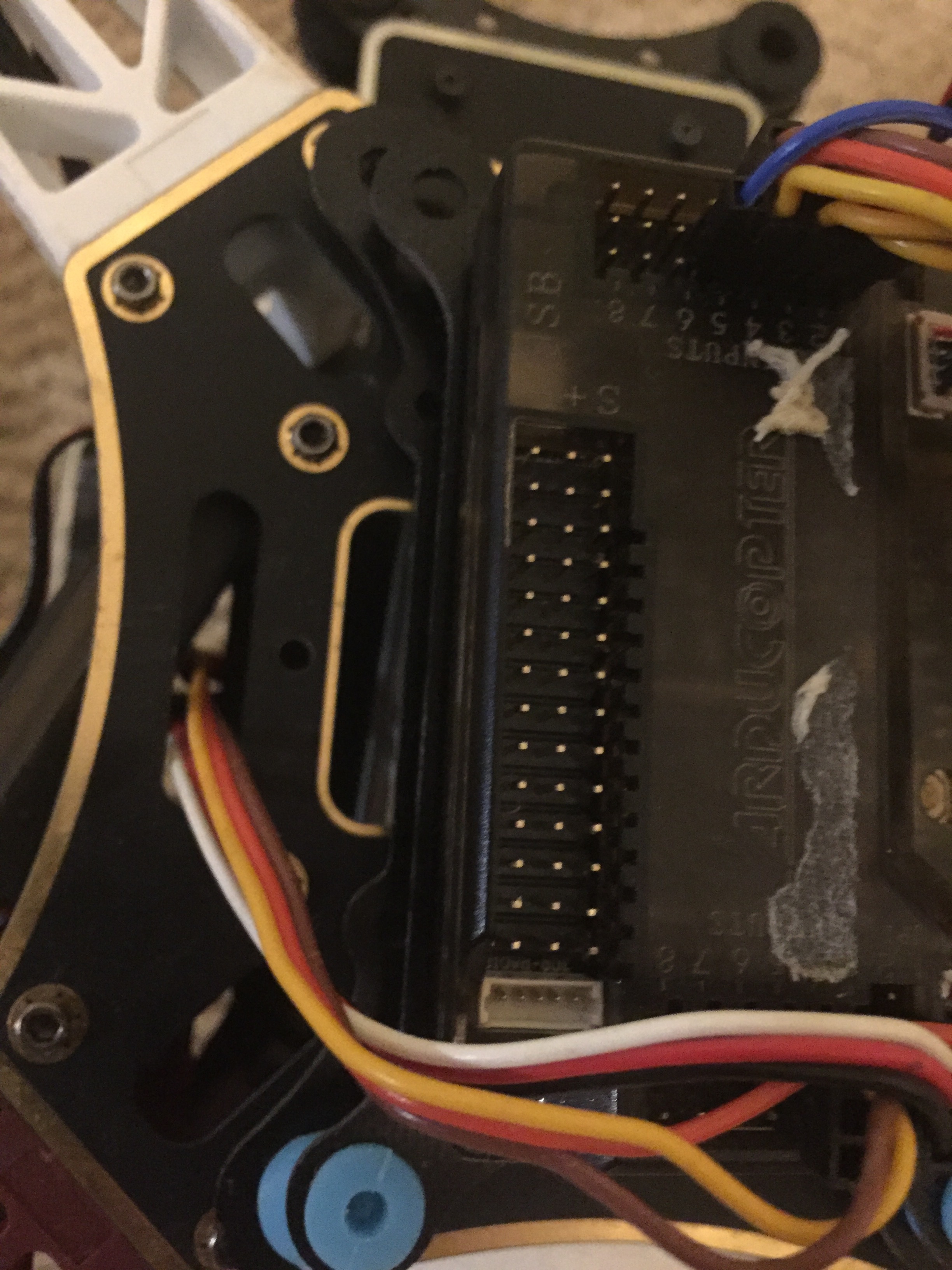
Looks to be HK clone of the APM 2.6
Load FW version 3.2.1
Try your calibrations again.
Ok but where do I find this version I can’t find it on mission planner and when I try to download it online and bring it over to mission planner it does not work.
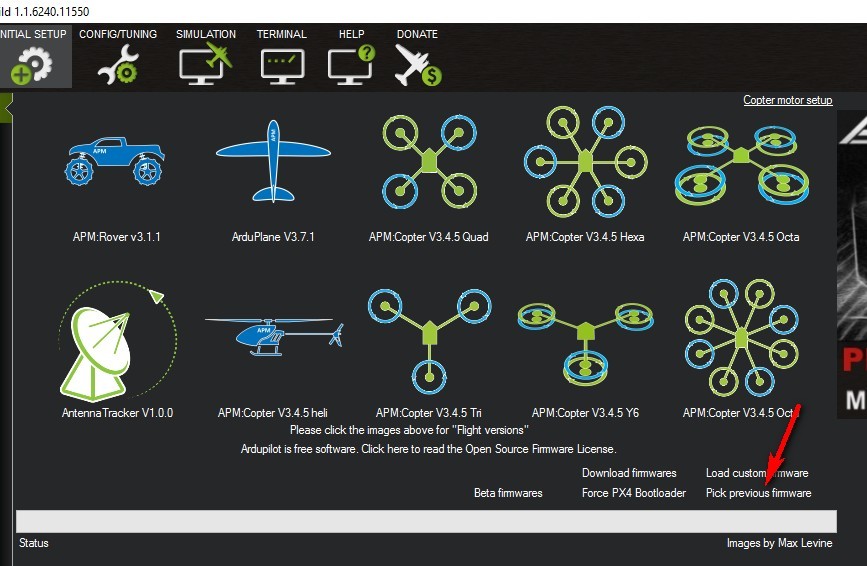
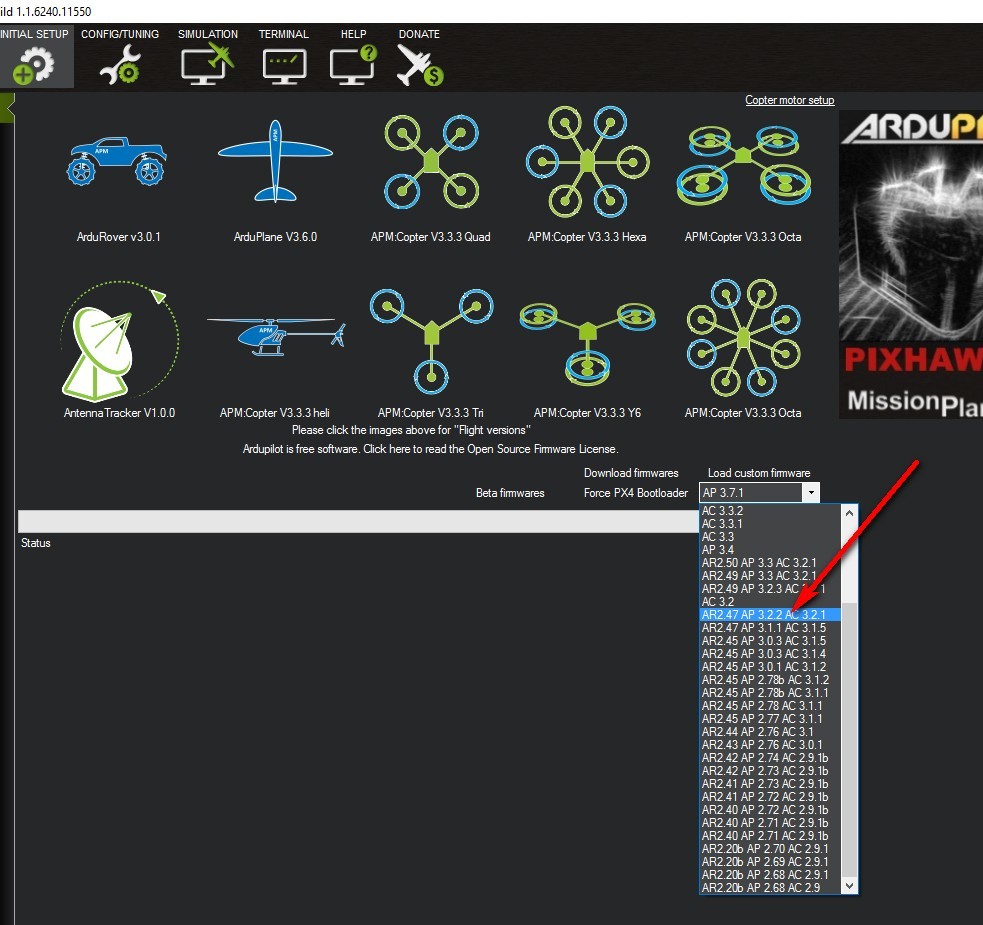
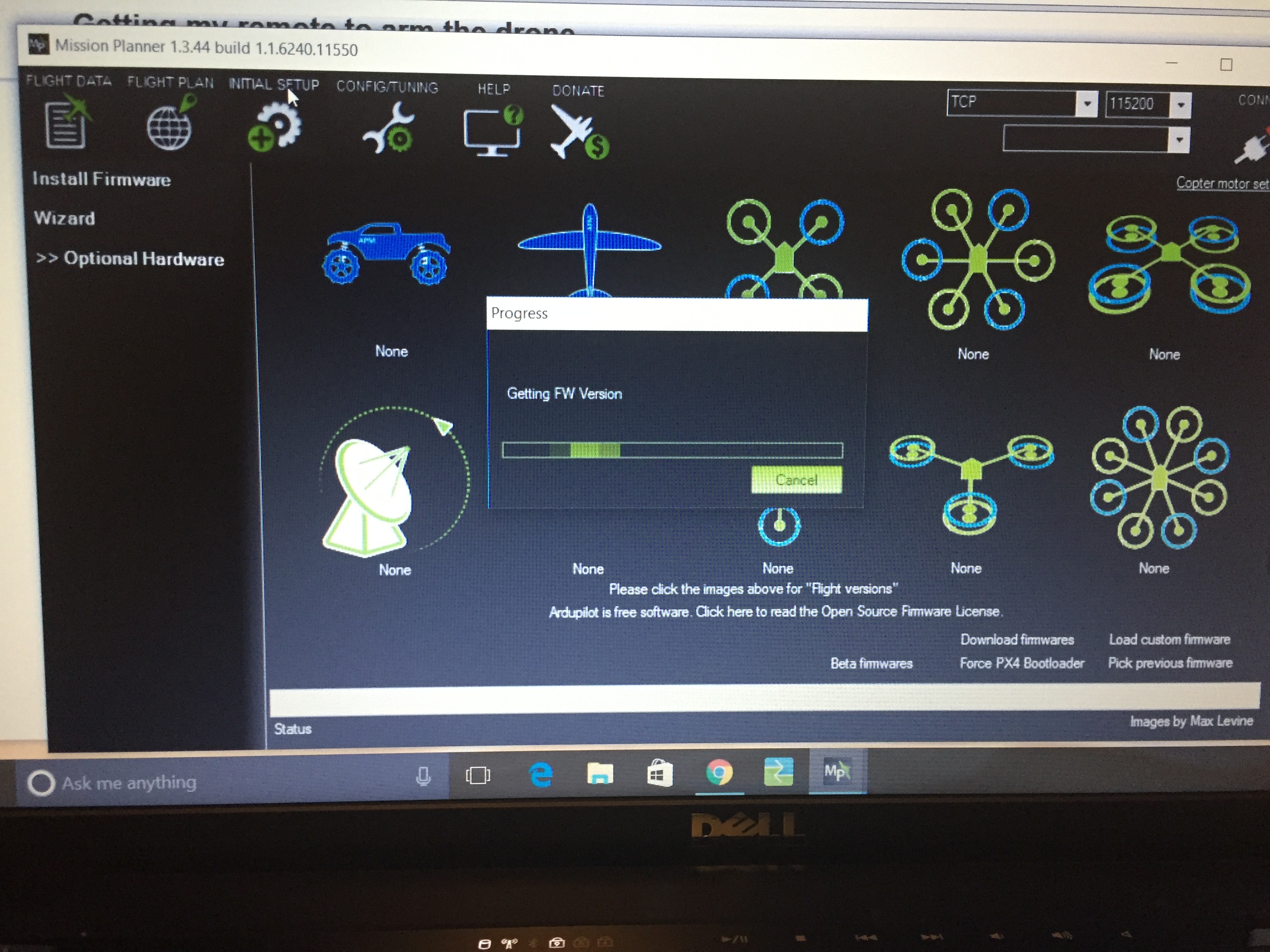
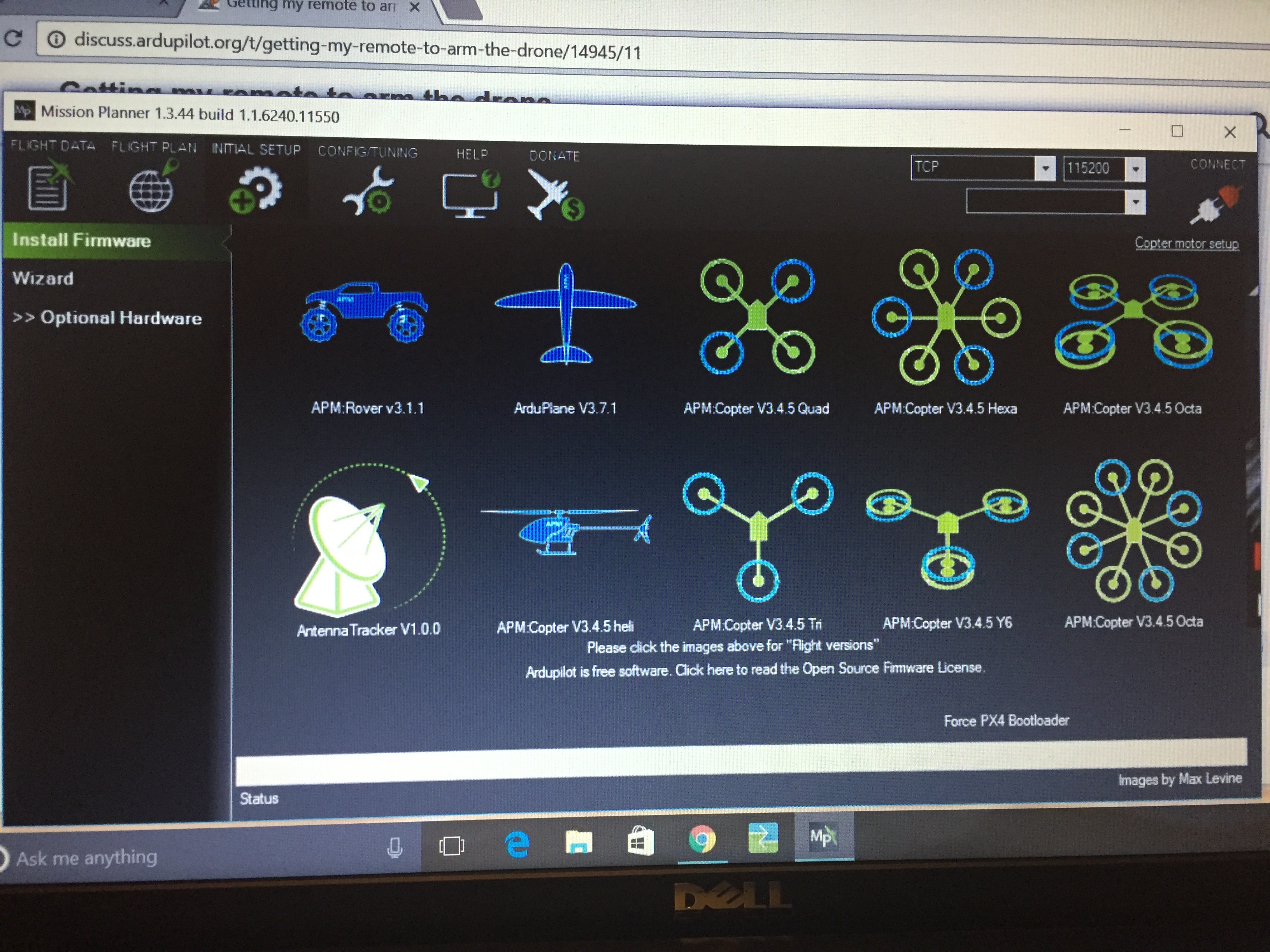
For some reason only while it is loading for a brief second does it give me that option. After it is done loading those options go away as shown in the picture above.
Alright I got it and downloaded it onto the drone. It is still beeping as I plug in the battery and try to arm it. In mission planner I am getting throttle response so the drone is recieving it and the compass is working fine in it. Is there a step I am missing from this point?
If you select the latest firmware showing in MP it will install 3.2.1 in any case because it recognizes the FC version. But you are passed that now. Perform all the mandatory calibrations.
The drone was already calibrated before and I did it again. Im not sure what else to callibrate beside the compass and the controller?
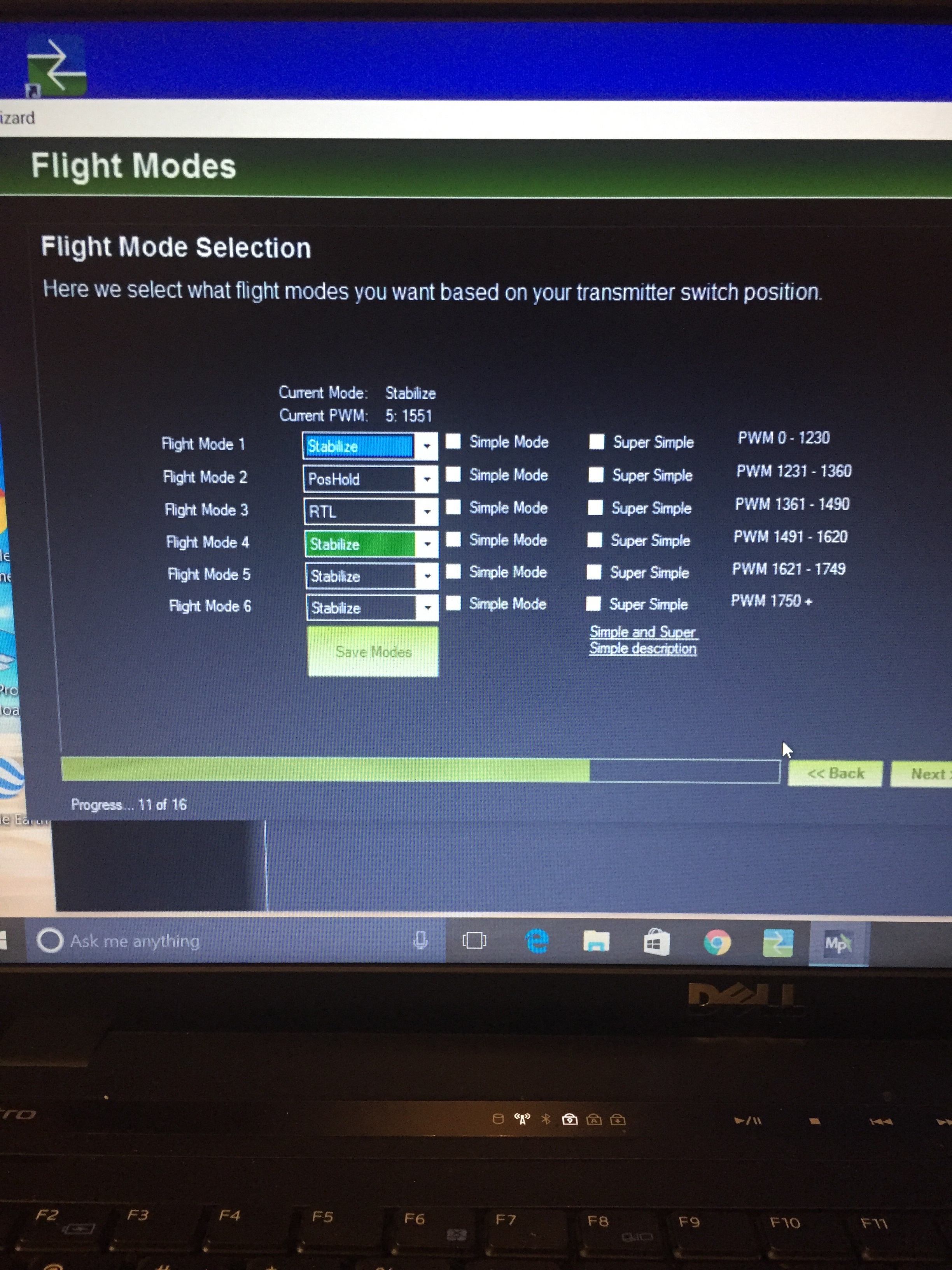
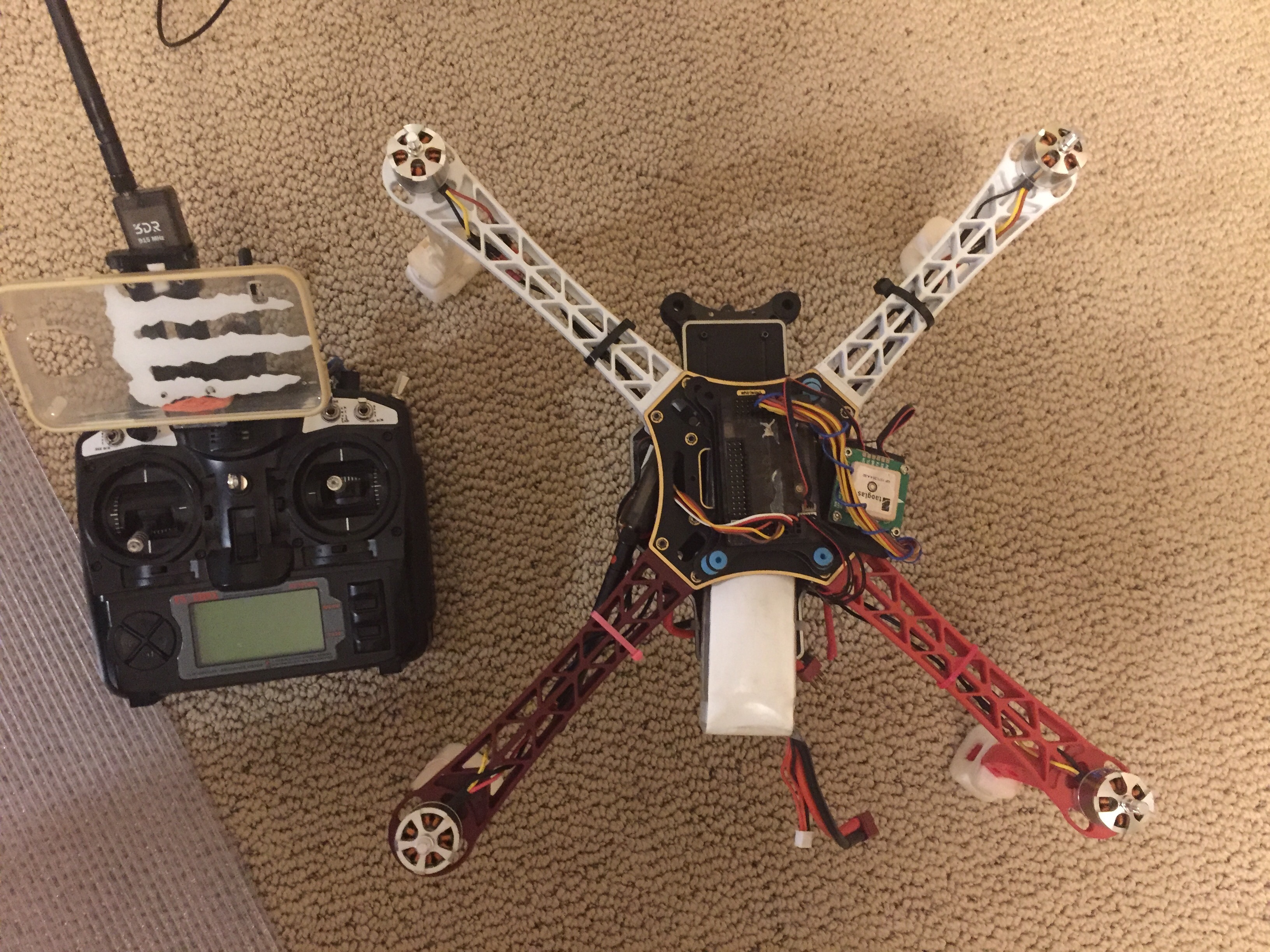
Do it again and include the accelerometers. It’s the 1st thing you see under “Mandatory Calibrations”. Just do all of them (Accel, compass, radio, flight modes). Does that photo show how you actually have the GPS/compass module mounted? If so what orientation do you have set in MP?
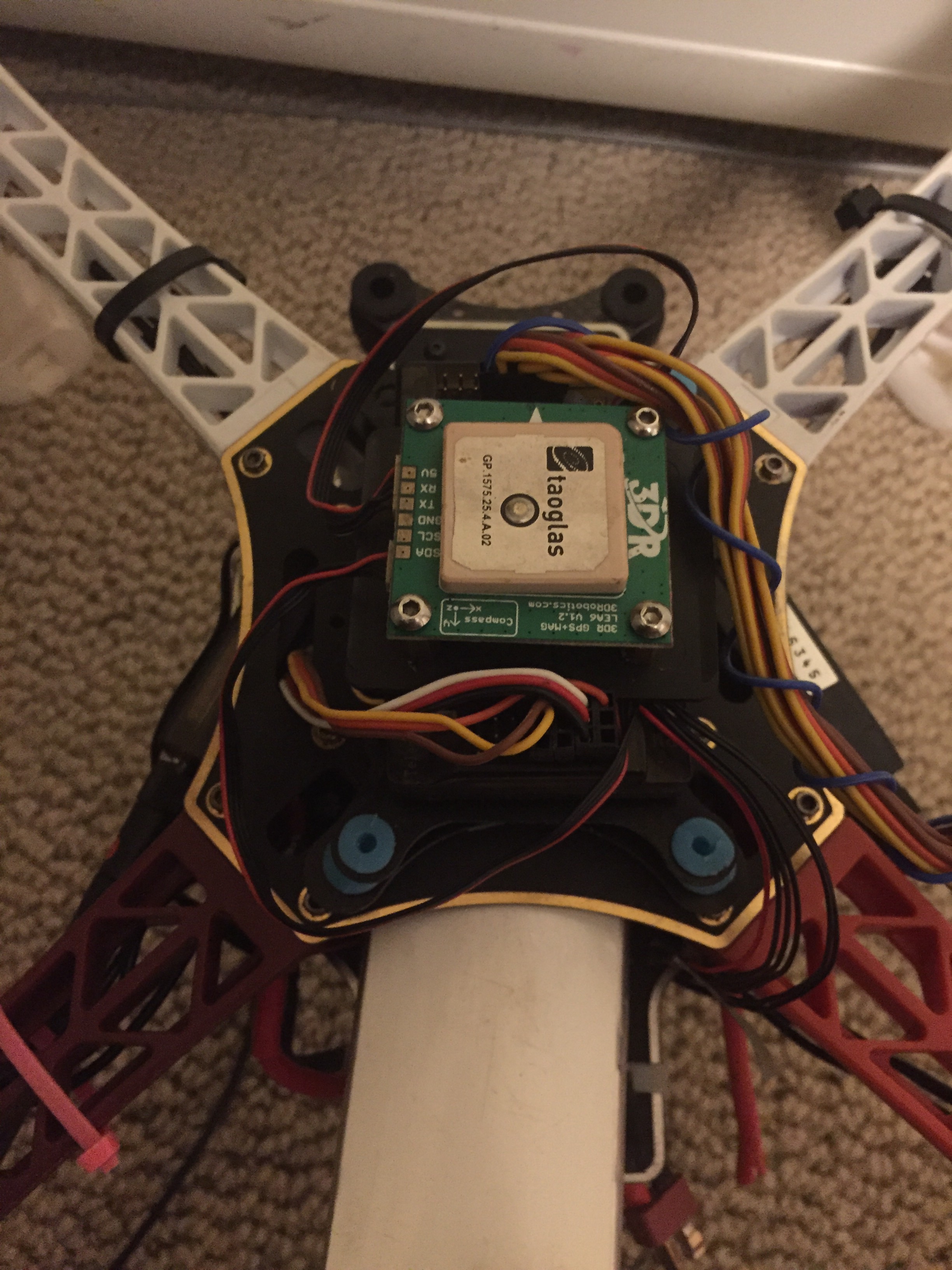
This is how I had it I just took it off so I could read the name of the board I had on the drone. Before the drone stopped working the GPS worked fine I had tower on my phone and used it to get my height and speed which were accurate.
The white arms are the front of the drone if that makes any difference to you also.