Hi everyone,
I want to try my hand at building a rover that I would like to use in artificial and natural cavities, where possible (I’m a speleologist). The goal is to be able to explore beyond the narrow passages where a human being cannot pass and a wheeled vehicle can see ahead.
Obviously it should have a cam for indirect vision by the operator.
I’d also like to mount a Lidar to collect the continuous scan of the explored environment. In speleology we use the manual lidar for the 3D scan of the explored environment, while in measurement, we obtain the section of the point where we are. From what I’ve read, here it’s only aimed at avoiding obstacles, but it might be interesting, if possible, to save the data to get the space reconstruction on post-processing.
They advised me to start with a Pixhawk PX4 starting from at least a basic kit, but I would also like to ask you for advice?
Do you have any suggestions?
Where can I document myself and find achievements and experiences of others?
Thanks
That is a very interesting use case. I have no idea about speleology, but I think I would not even use an autopilot for this. There is certainly no GPS reception and overall space should be limited. If you need the IMU data, an autopilot would make sense of course.
I would build something like the pipe/canal inspection robots. Perhaps with an umbilical cord, to get the rover back if it gets stuck and for control and video transmission. I have no idea how to fix a lidar to something like this and keep it rugged and small at the same time.
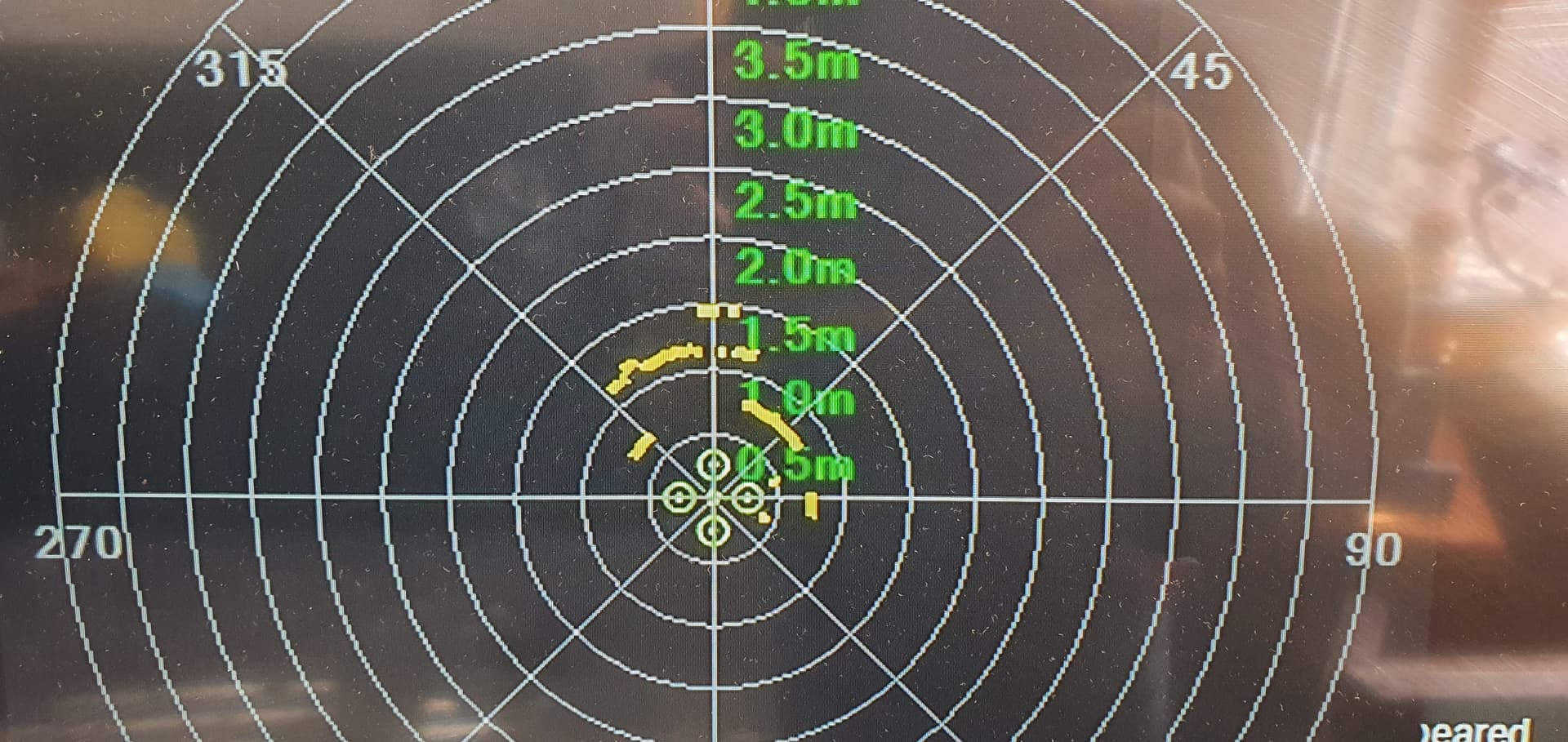
@count74 A version of your lidar proximity could work for some basic idea of the size of the space around the vehicle using the proximity display, it would just need a waterproof lidar like a tfmini plus and a waterproof servo.
It could work for a rough overview, but the ruggedness of the diy lidar is not so great. One low hanging rock and it is gone. I have an idea for a 360° 2d lidar, which is mounted on a stepper motor, so the rotation axis of the lidar is 90° to the stepper motor axis. While the lidar is doing its 2d scanning, it is rotated by the stepper motor until a complete 360° by 360° (-blindspots) scan is completed. The stepper motor would only have to rotate 180° to get a full scan. So a hollow axis could work to route the cabling through. This would work in any orientation on the rover. At the front it would even help to locate drops and steps. I have no idea how to program something like this, though…
I would try to mount the lidar on a metal L-bracket and only use the stepper motor as a support. This way, the scanning plane of the lidar could be aligned with stepper motor axis. I do not know if this would really make a difference for the scan.