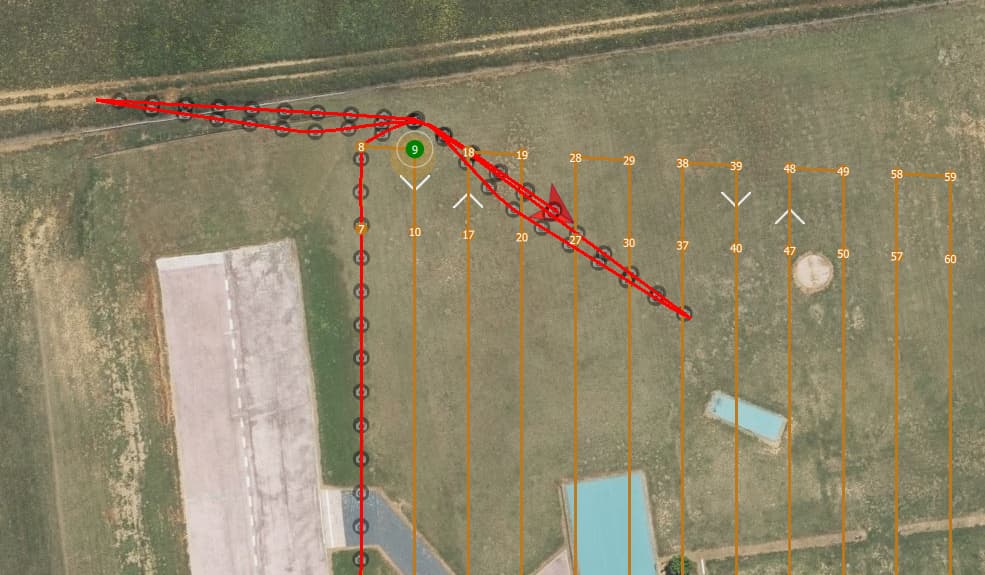
I use Bendy Ruler for geofence obstacle. But instead of going to the next wp when the drone avoids the obstacle. Trying to go to wp in the barrier. I am attaching the flight image. After passing the barrier, it needs to go to the 10. WP.
Do you have a log for that flight?
So you defined a waypoint inside an obstacle, why?
While navigating the vehicle to the next waypoint it also tries to avoid the obstacle.
Probably WPNAV_RADIUS (or custom radius of the exact WP) is less than the obstacle’s (that is also located at the exact waypoint) radius.
But vehicles shouldn’t accept the waypoint or fence list like this (whichever comes last).
1 Like
In the drone mission, the wp must be in the obstacle. Because it has to go around the obstacle. What I want is for it to go to the other point after passing around the obstacle.
Then do not place the WP at the obstacle. It causes the problem.
1 Like
I’m talking about a problem. “According to what you said, the answer to a problem is that the drone does not reach 10 meters, then do not increase it to 10 meters.” etc
No, that is not what any of us is saying.
What we are saying, is:
- To avoid and obstacle, put one waypoint before the object, and another one after the object.
- Do not put the waypoint very close to obstacles, otherwise it will try to reach the object and you get strange effects.
thank you. I will try to solve it in software