Hey, since I’m new to this, I have a few questions about your system for acro mode.
If I understand correctly, you use your sticks to specify what angular velocity you want the drone to have
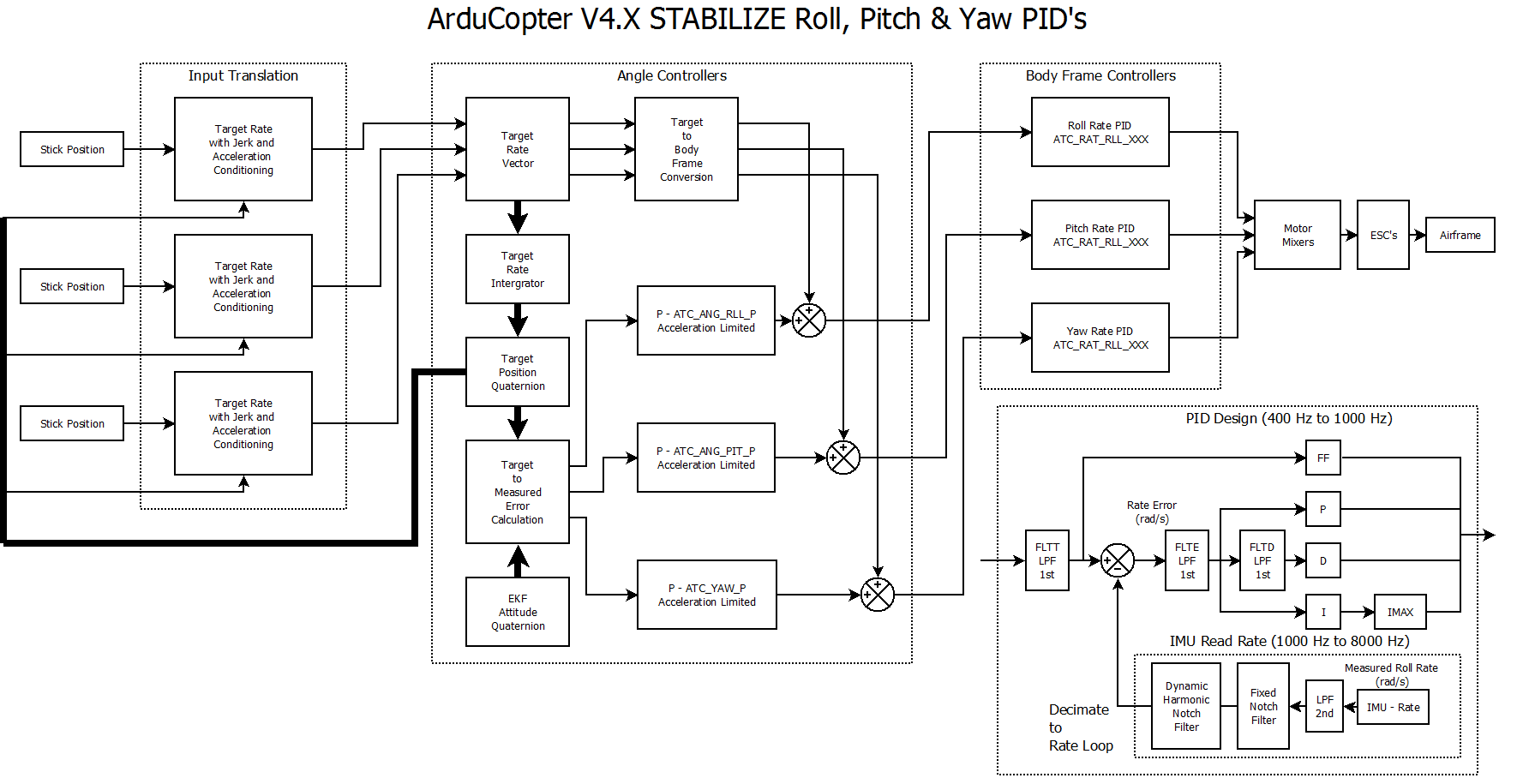
In the diagram below you use a feedback from “target position quaternion” to “target rate with jerk and acceleration conditioning”.
What exactly is that for, or what is it supposed to do. What do you need the quaternions for?
Another question would be, what exactly do you do in “target rate with jerk and acceleration conditioning”.
Is it a bug in the “Body Frame Controller” that all blocks there have the name ATC_RAT_RLL_xxx ?
And a last question would be, what exactly the block “FF” does in the PID controller, or what it stands for.
Many thanks already
Kind regards
Lindrit
Quaternions are the best way of representing rotation for doing math on.
FF is feed forward, basically like a proportional but without risk of causing feedback loop as it is proportional to demand instead of error.
Input jerk and acceleration limits are there to limit unavoidable errors caused by demands exceeding what is physically possible.
Bug would have to be checked in the code but it probably is just somebody not updating the image after fixing matlab source or error copying the schematic.
thank you but I have two more questions :D.
why don’t you put “target to bodyframe” before “target rate integrator”? So that you have the inputs in the drone coordinate system?
and my second question:
Do I understand that right, that you want to calculate with the “target state vector” after the “target to body frame conversion” and the “q_err”, the moments around the three main axes(roll, pitch, yaw) ? and these then go into your controllers in “body frame controllers” as Input ?
Thanks