I’ve been using SITL for a while and just noticed that the imu from Gazebo and ardupilot don’t match up. Regardless of what settings I put on the ardupilot this occurs. I assumed at first it was the INS_GYRO_FILTER setting causing this but if I set to zero to use raw this still happens. @khancyr any Idea what could cause this?
If I use SITL without gazebo this is not as pronounced.
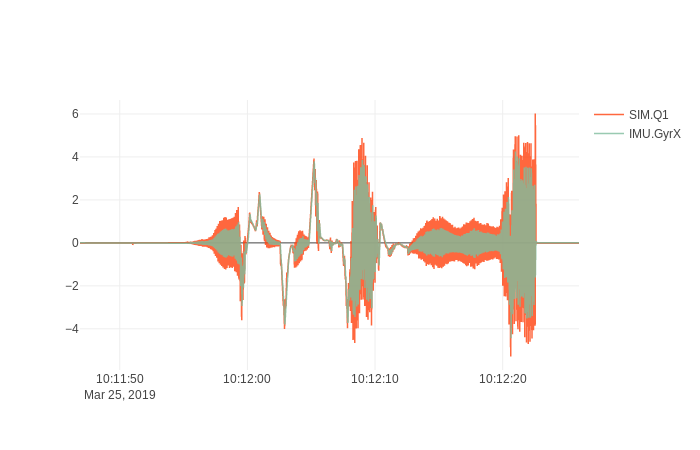
I overwrote the SIM.Q log with state.rollRate, pitchRate etc… also changed it to log at 400Hz along with the IMU.
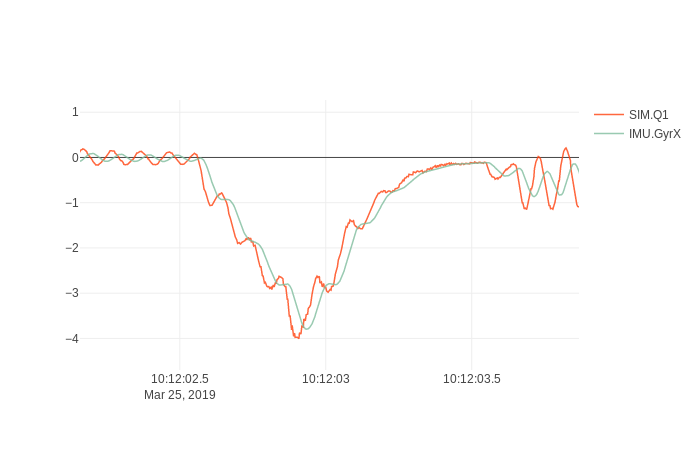
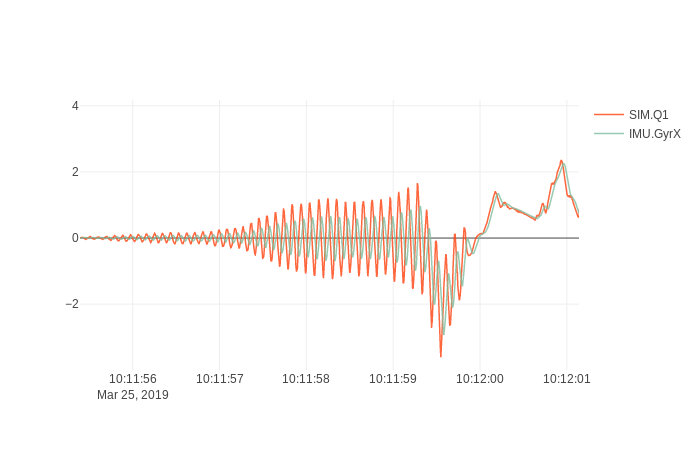
I notice about a 0.035 second delay.