Hello developers!
My issue is almost the same as this one
I want to use the already implemented collision avoidance algorithm from the Ardupilot 4.3.6 flight stack.
Here is what I have now :
I followed the ardupilot developer document to install Gazebo and attached Terabee Tower Evo Lidar sensor.
I modified terabee_tower_evo sensor’s plugin like bellow
<update_rate>20</update_rate>
<plugin name="tera_0" filename="libgazebo_ros_ray_sensor.so">
<ros>
<namespace>/gazebo</namespace>
<remapping>~/out:=range_0</remapping>
</ros>
<output_type>sensor_msgs/Range</output_type>
<radiation_type>infrared</radiation_type>
</plugin>
and I confirmed the topics /gazebo/range_[0:7] via ros2 topic list with correct data
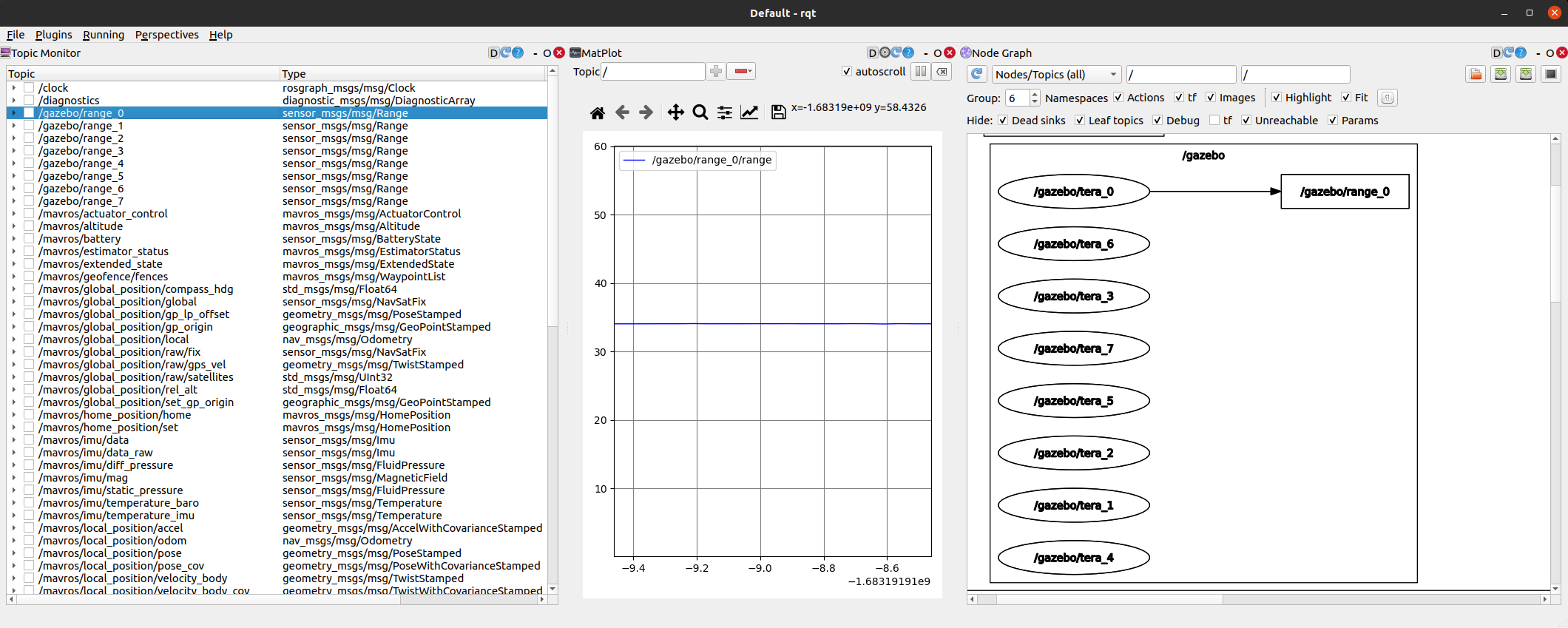
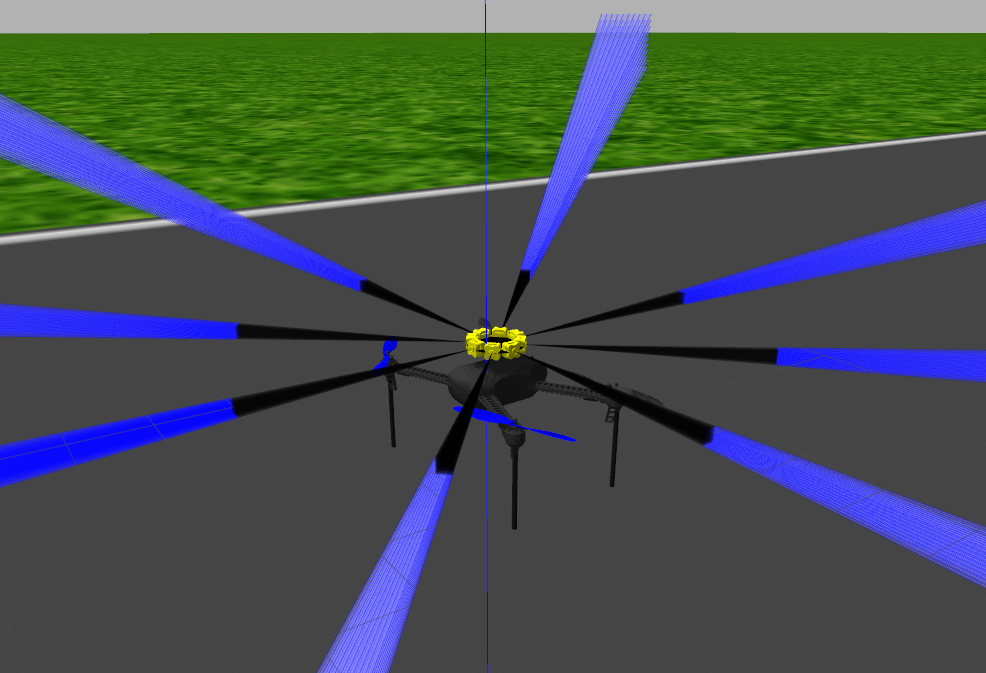
Here is my Gazebo simulation with an iris drone and the Terabee Tower Evo Lidar sensor on it :
I have some problems to make SITL using Gazebo.
I have no idea to send message from gazebo to the ardupilot DISTANCE_SENSOR.
I want to do that so the collision avoidance will be handle by the Ardupilot simulated Copter. I dont want to handle it with ROS or anything.
If you have any explanation on how to that ! ![]()
Do you even know of its possible ?
Thanks and have a nice day ![]()