I’m purchasing the power system for my FX-79, and had a question. Was there a reason you have went with a smaller prop / higher KV motor combo than most others? I see a lot of 12.6 props with lower KV power plant being used on this wing, Just curious!
The combination was proven on several Ranger EX setups, including mine, and provides 746 watts at 51 amps using an APC 10x6 e-prop with a 4s Lipo pack. No reason to swing a 12" prop if you don’t need to.
Looking good! I did consider the FX-79 at one point but did run into some claims as @count74 mentioned. That’s when I decided to go with the RVJet. Now, if I can only get my lazy behind to go flying again, I’ll dust her off.
By the way, have you seen Marco Robustin’s FX-79 conversion? He’s got that thing well tuned to reliably and comfortably recover from a flat spin!
Anyway, good luck with the build and will be following the progress.
No, I haven’t seen that video before so thanks for the link. Marco is my hero! It’s too bad that he never seems to post power system setups or details on his projects.
The FX-79 performed as I would have expected. I have plenty of large wing experience and the videos I have seen of the FX-79 all show it performing well so I hope to have a good maiden transition soon.
I did a search and found more FX-79 videos from Marco. It looks like he had it all tested out in 2017 before I even started my project. I see that he also uses a Taranis X9D. I’ll see if I can find a list of components he used. There should no longer be doubt that the FX-79 makes a good QuadPlane and has plenty of payload capacity for batteries and cameras.
Yes, it is a shame that he won’t share his build specs and params. I think he’s avoiding any liability or being publicly blamed for problems when others copy his settings and the build fails or whatever. I had been following his videos for a couple of years now; since my re-introduction to the hobby after a quarter century hiatus. If he was more forthcoming and demonstrated some willingness to participate more in assisting the community forums, I may have gone ArduPilot instead of PX4 Pro. He just seem to make things look so simple and stable.
@Wmacky I actually experienced the same thing with my RVJet conversion. Even with a 10000 mAh 4S shoved all the way up front and a 2-axis gimbal and a GoPro Hero 3 in the nose, I had to move the rear quad motors with only about 1/2" clearance between its props and the pusher, then get the front motors forward enough to balance. I think you’ll find, when you look at other flying wing quadplanes, to be the same.
I finally have this project on my testing radar so by mid or end of June it should be tested. This got me thinking about the next step, which would be converting the application to a mapping plane. For FPV, it is fine to have the cameras on the top since you use them for flying. For a mapping plane, it is typically an autonomous flight with cameras on the bottom. Some plane designs have landing gear like the Ranger EX. The FireFLY6 wing uses retracts and this has worked well. I’m not thrilled with the stick legs added to the Nimbus 1800 Mapping Version as it seems quite the afterthought for a $2200 design.
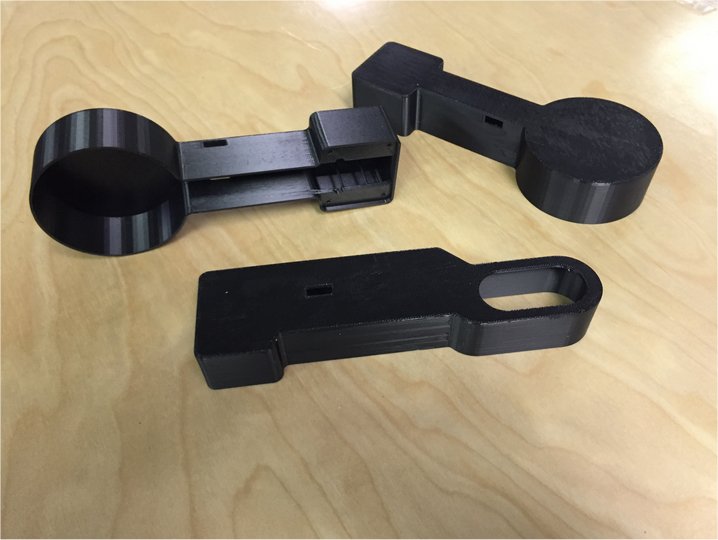
I came across this 3D printed design below for the 2-meter E-flight Opterra and it looked perfect for the FX-79 as well. So this will be my next step after transition testing later this month. I’m having them printed now.
They are due to arrive today and cost $56 to print. All 3 pieces weigh 3.6oz. The nice thing about them, assuming they fit is that gluing them in place will not weaken the wing.
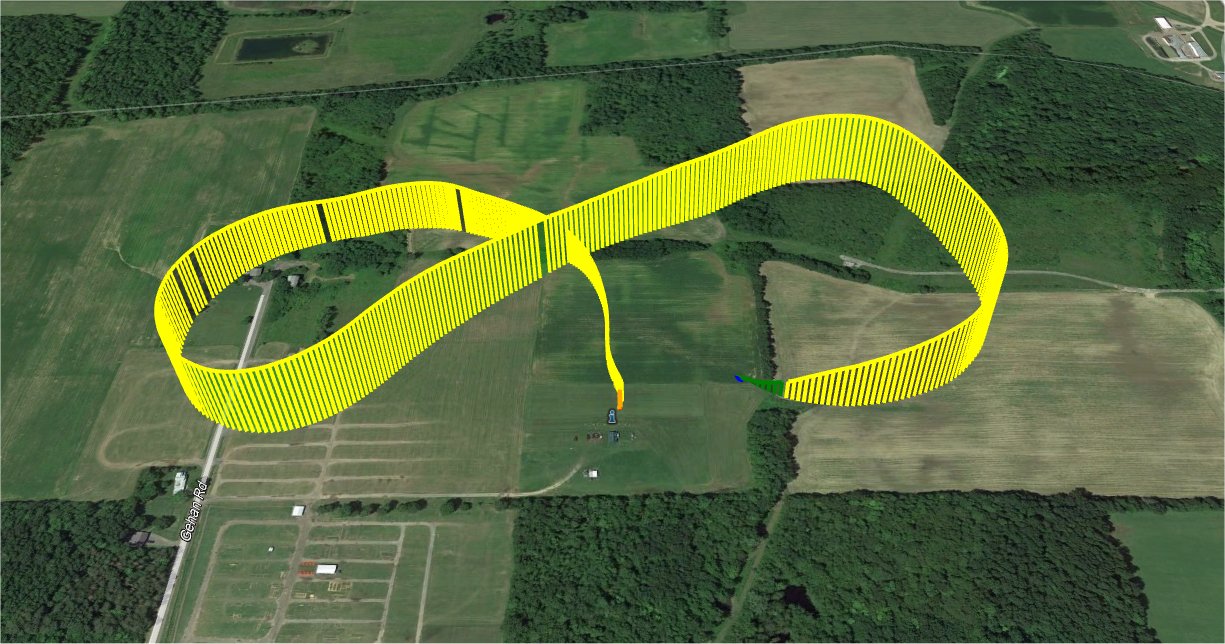
The maiden flight of the FX-79 wing started out great, but, after one circuit, the plane abruptly went in at about a 45 degree angle. My camera guy missed the crash but I changed back to QSTABILIZE mode too late before it hit the ground. You can see the green area at the end of the flight which is QSTABILIZE mode. I looked at the logs but I am still not sure what happened.
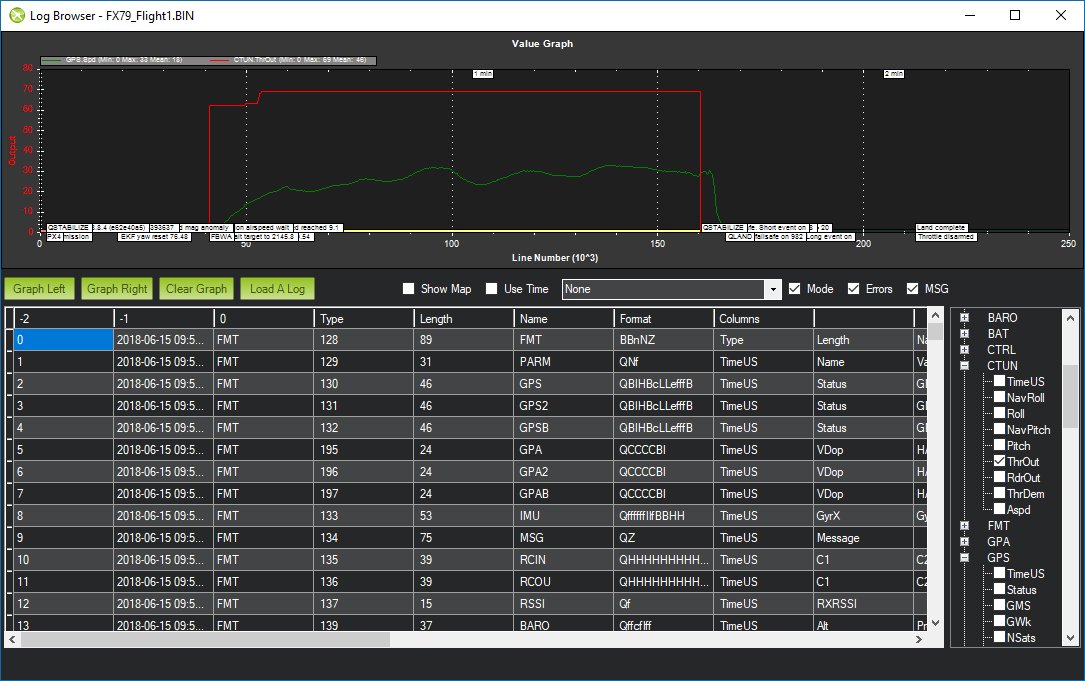
One thing that seemed odd with the Plane v3.8.4 firmware was that my CTUN ThrOut abruptly dropped to zero at the same time the wing headed for the ground. You can see my GPS speed drop right off after I lost forward flight power in FBWA mode. The wing is fixable but I lost some wires on a couple quad motors so it will take some time to repair.
Oddly, we saw the same issue on my Ranger EX plane which flew fine for several circuits in FBWA mode and then headed for the ground. It also used Plane v3.8.4. I’ll be checking the logs on that flight as well. It used to fly fine last Fall when I used an older version of 3.8. This is just a theory for now since both planes had similar issues. I need to check if I had any failsafe features enabled too. I posted the Flight 1 log below.
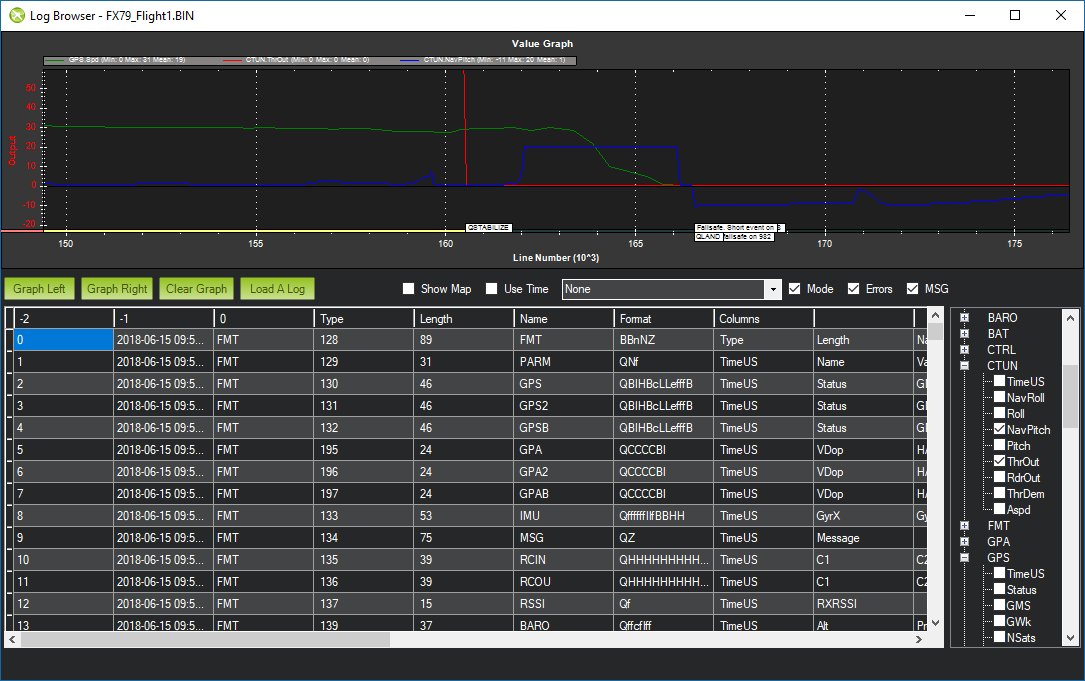
One more image from the logs showed that my NavPitch (Blue) tried to compensate for the lost speed and altitude (Green) after the CTUN ThrOut (Red) dropped to zero.
Went into failsafe at the end. Also something physical or structural may have broken as vibrations and roll attitude pegged right about the time it went into failsafe.
Battery current went way up and voltage sagged correspondingly at that same moment.