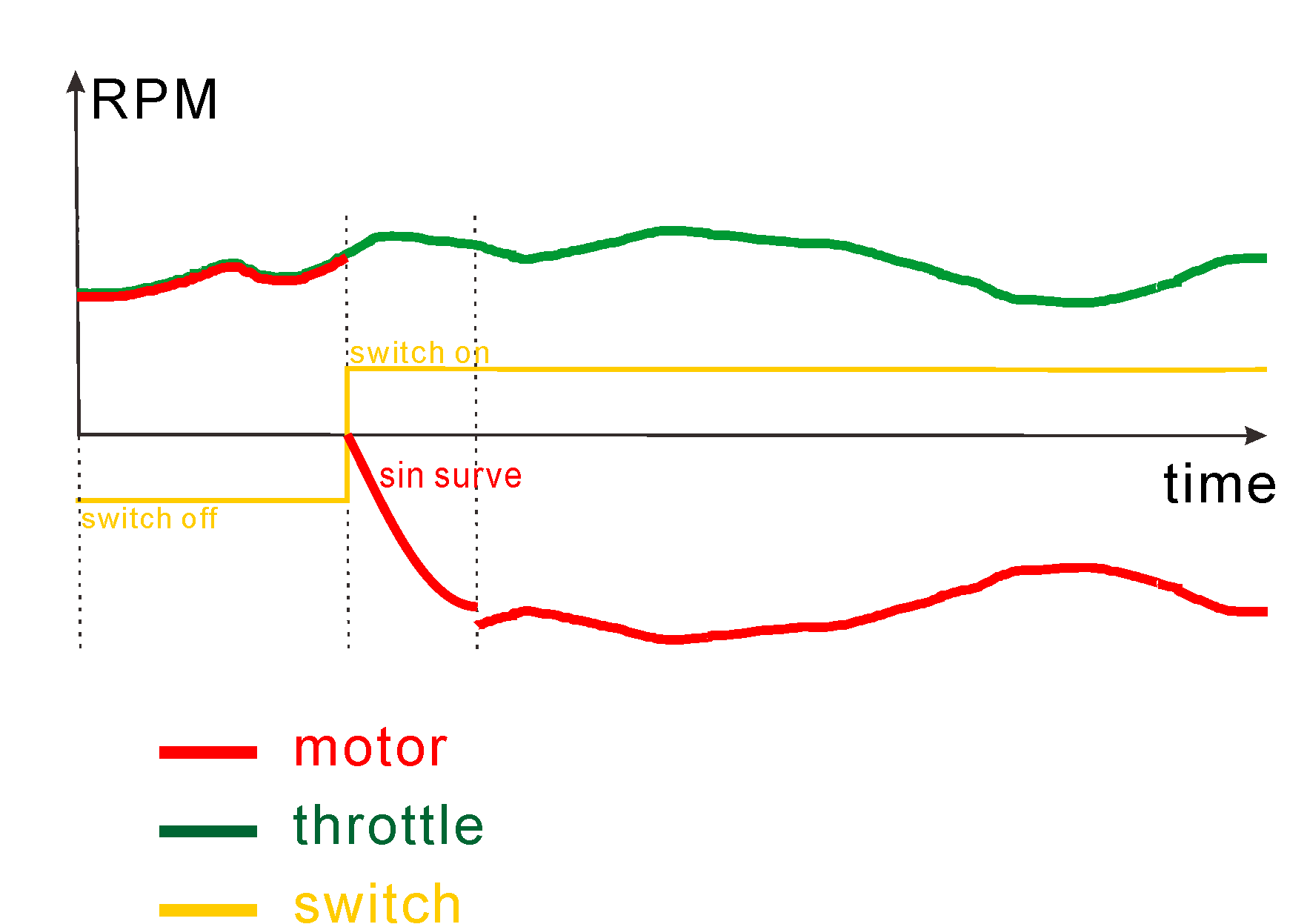
Does anyone know how Ardupilot+Pixhawk can automatically adjust the motor RPM according to the function?