Hello, we have designed an h743 flight controller and a modernized for arduplane based on Blue Robotics Navigator flight controller, what we are looking for is to follow some common designs of popular flight controllers to implement something more of an industry standard. I wonder whether there are some PCB design of something like Kakute H743-wing or Matek H743-wing so we can take them as inspiration.
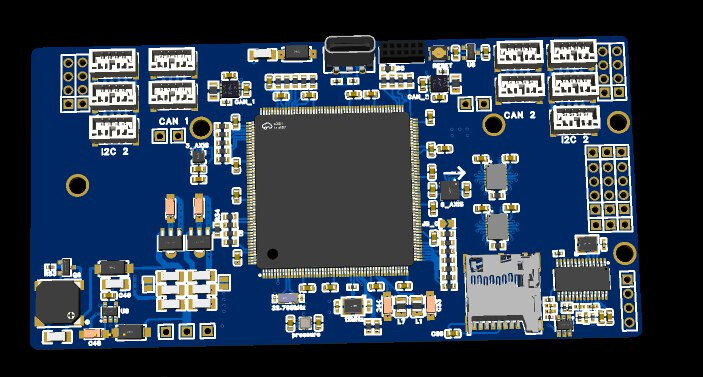
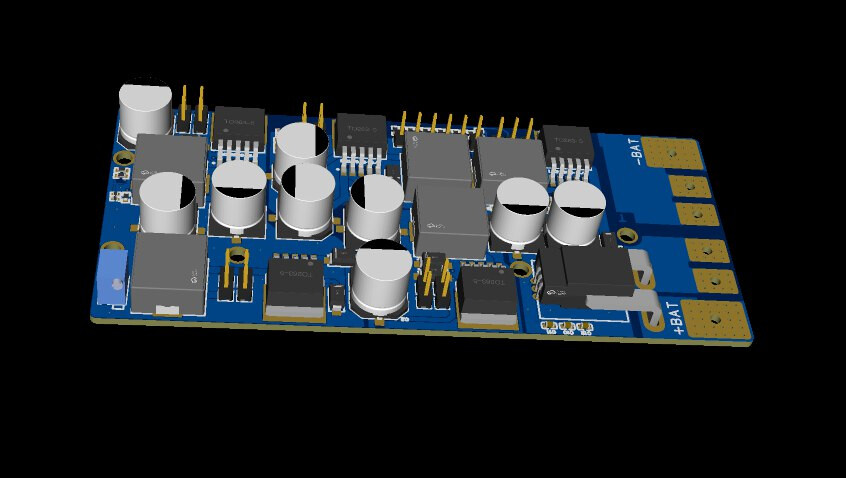
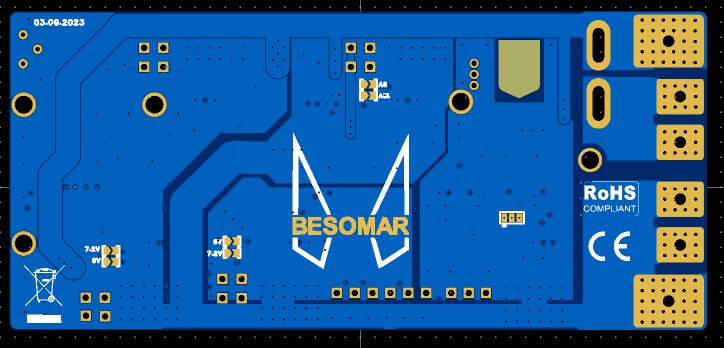
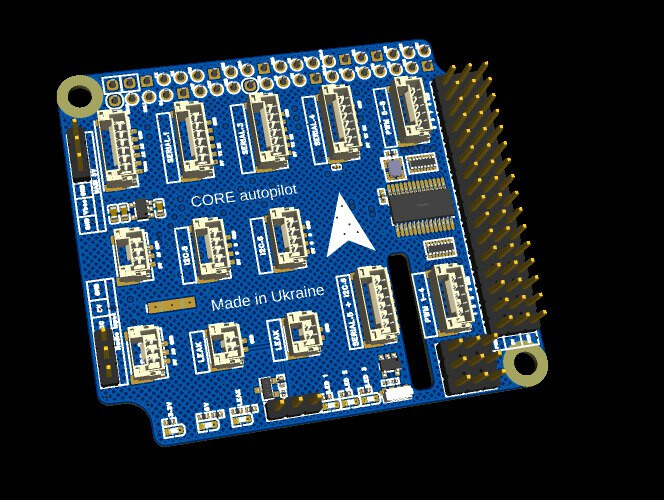
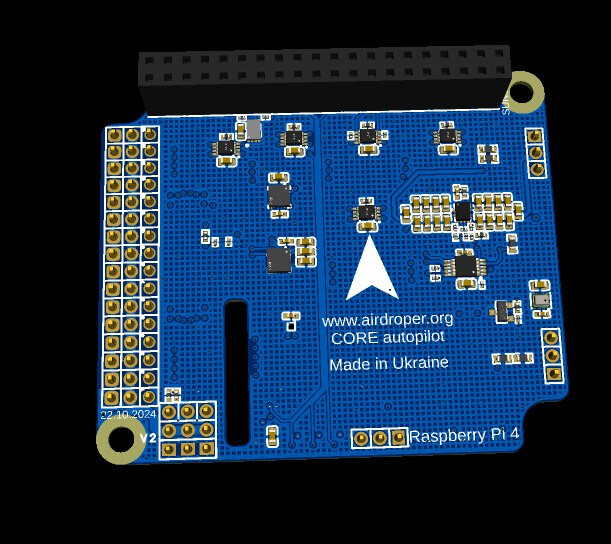
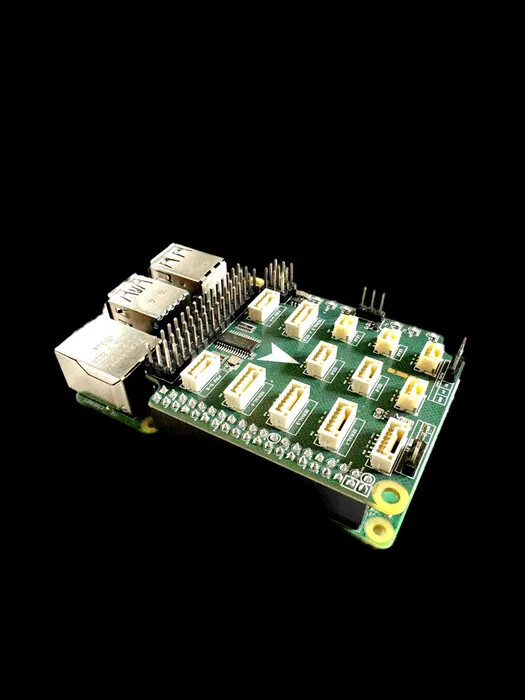
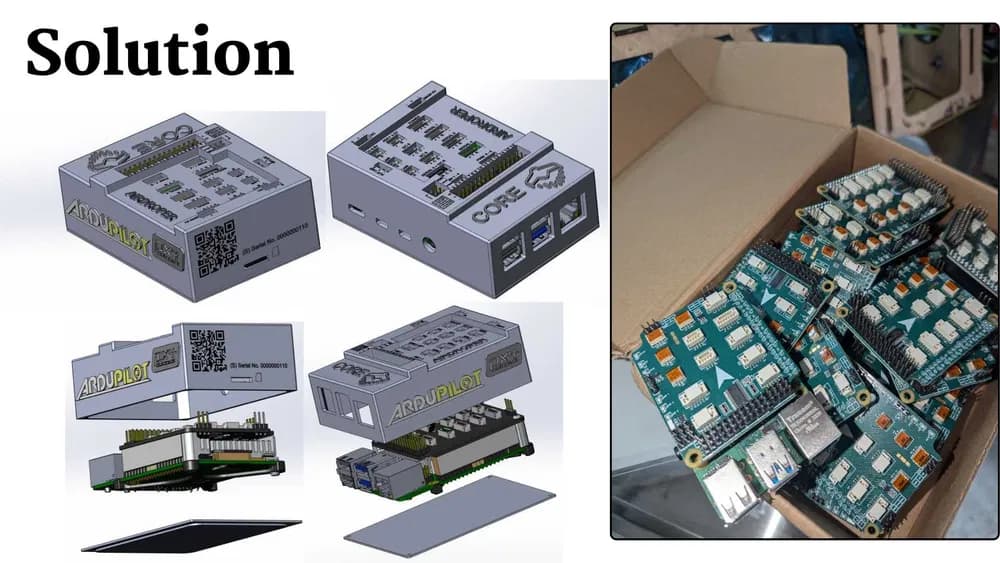
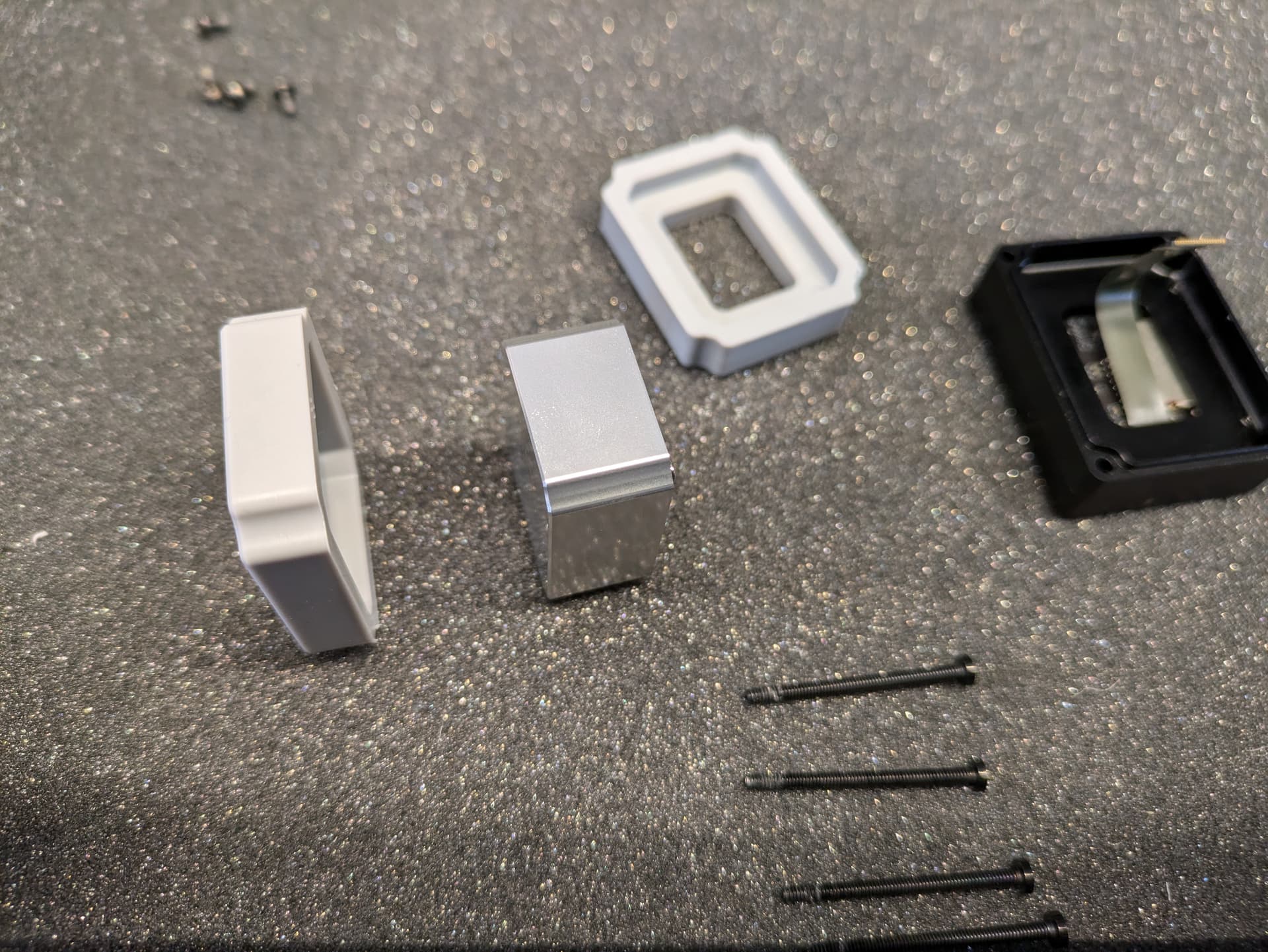
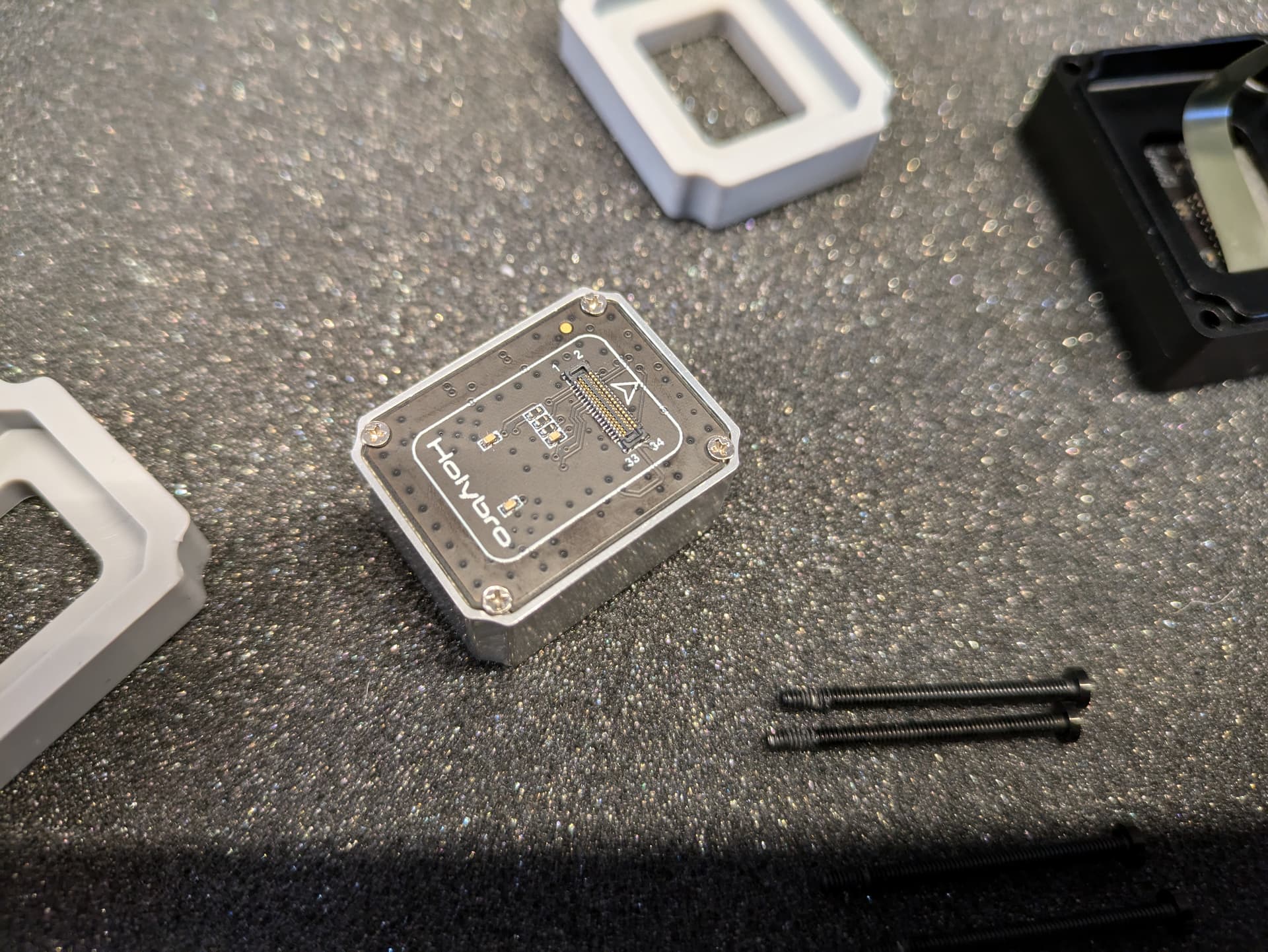
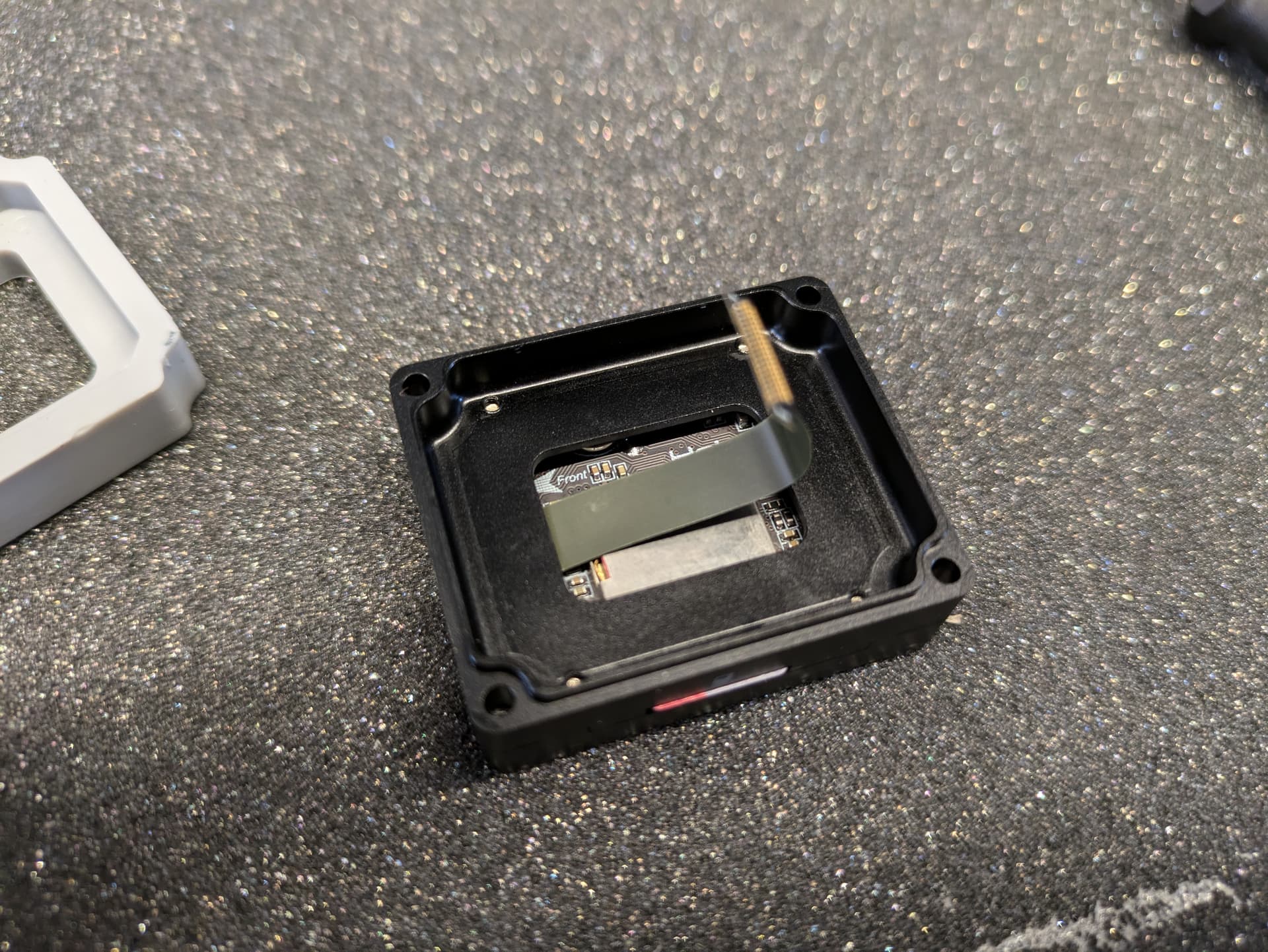
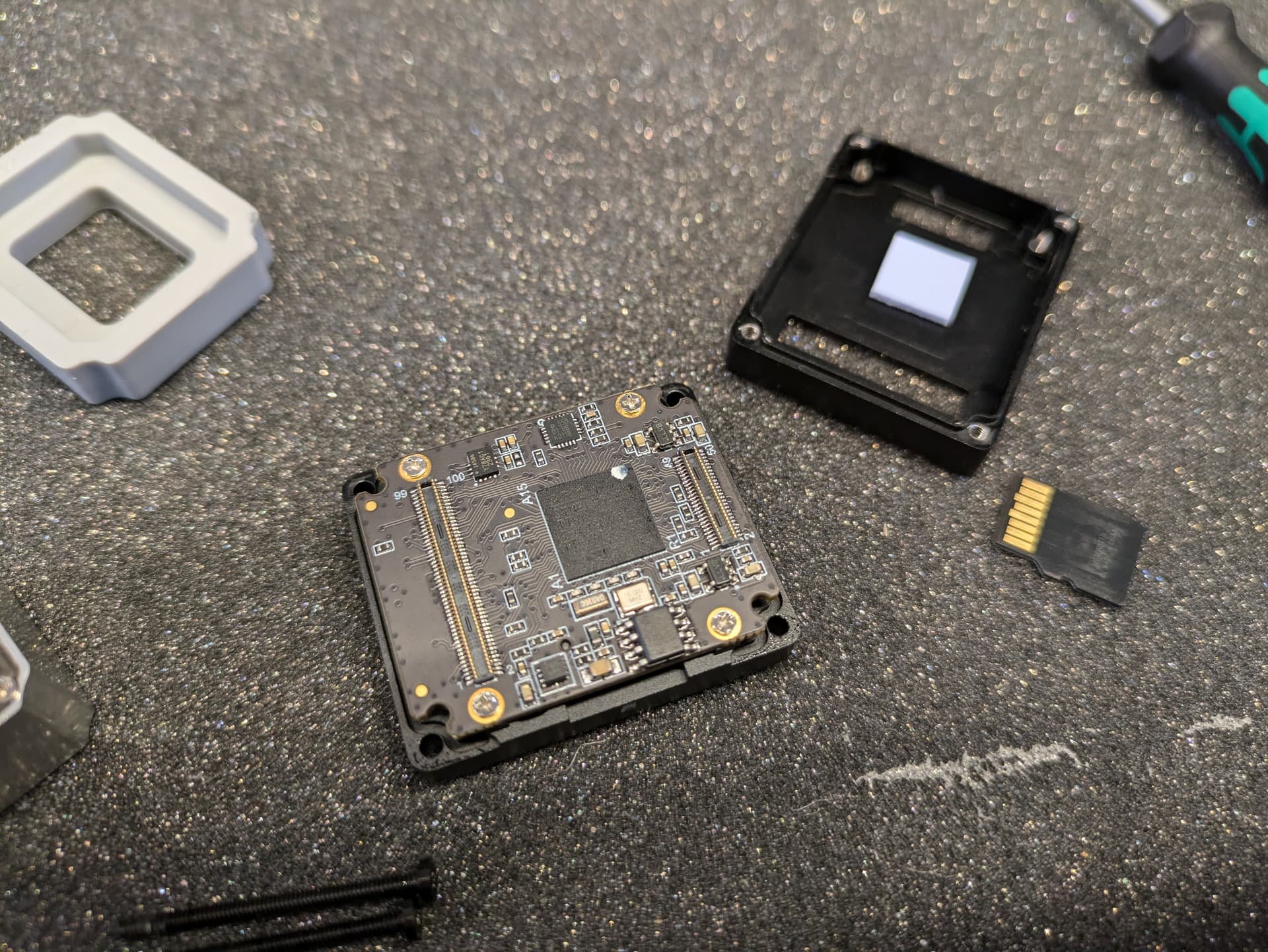
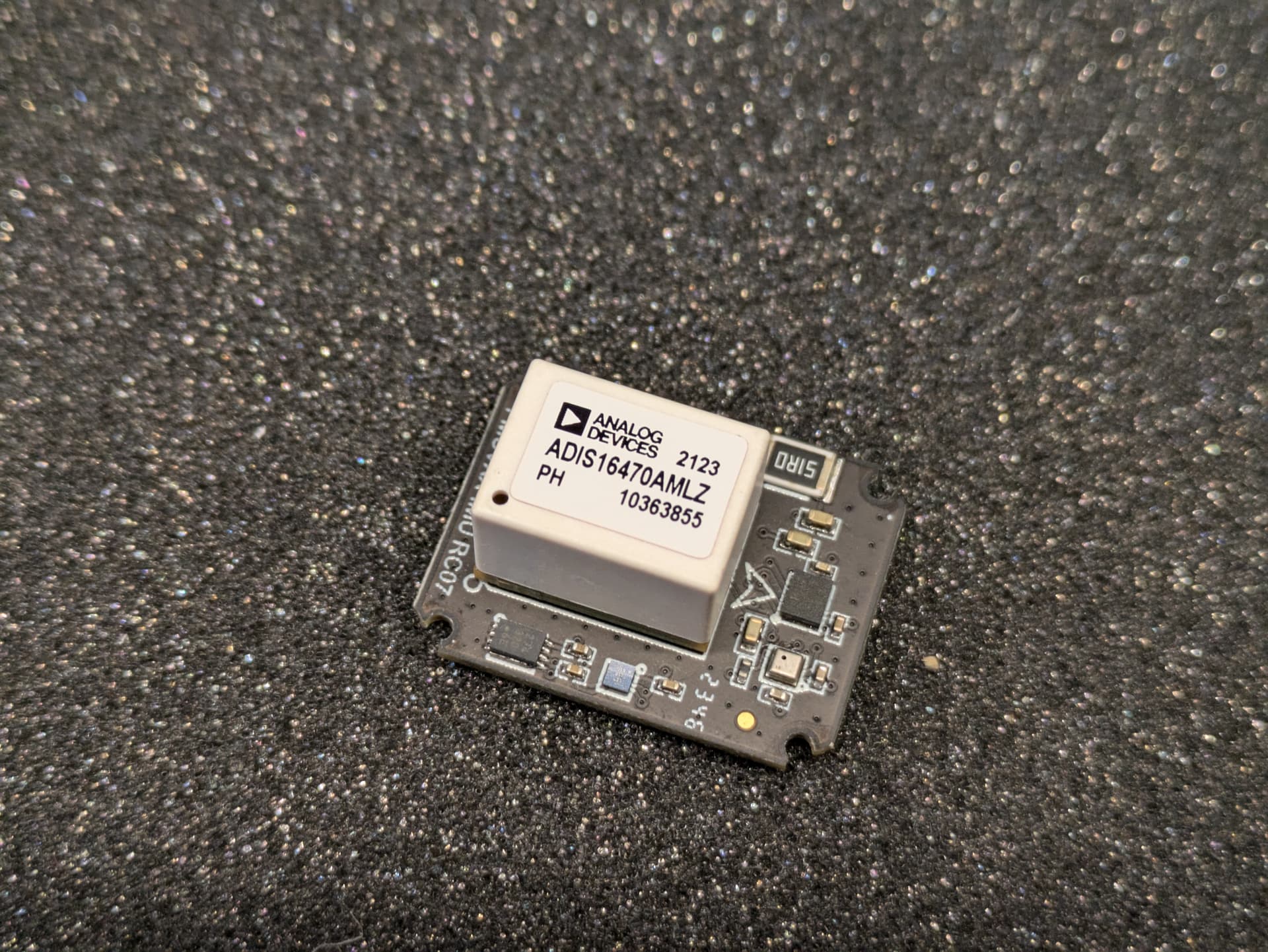
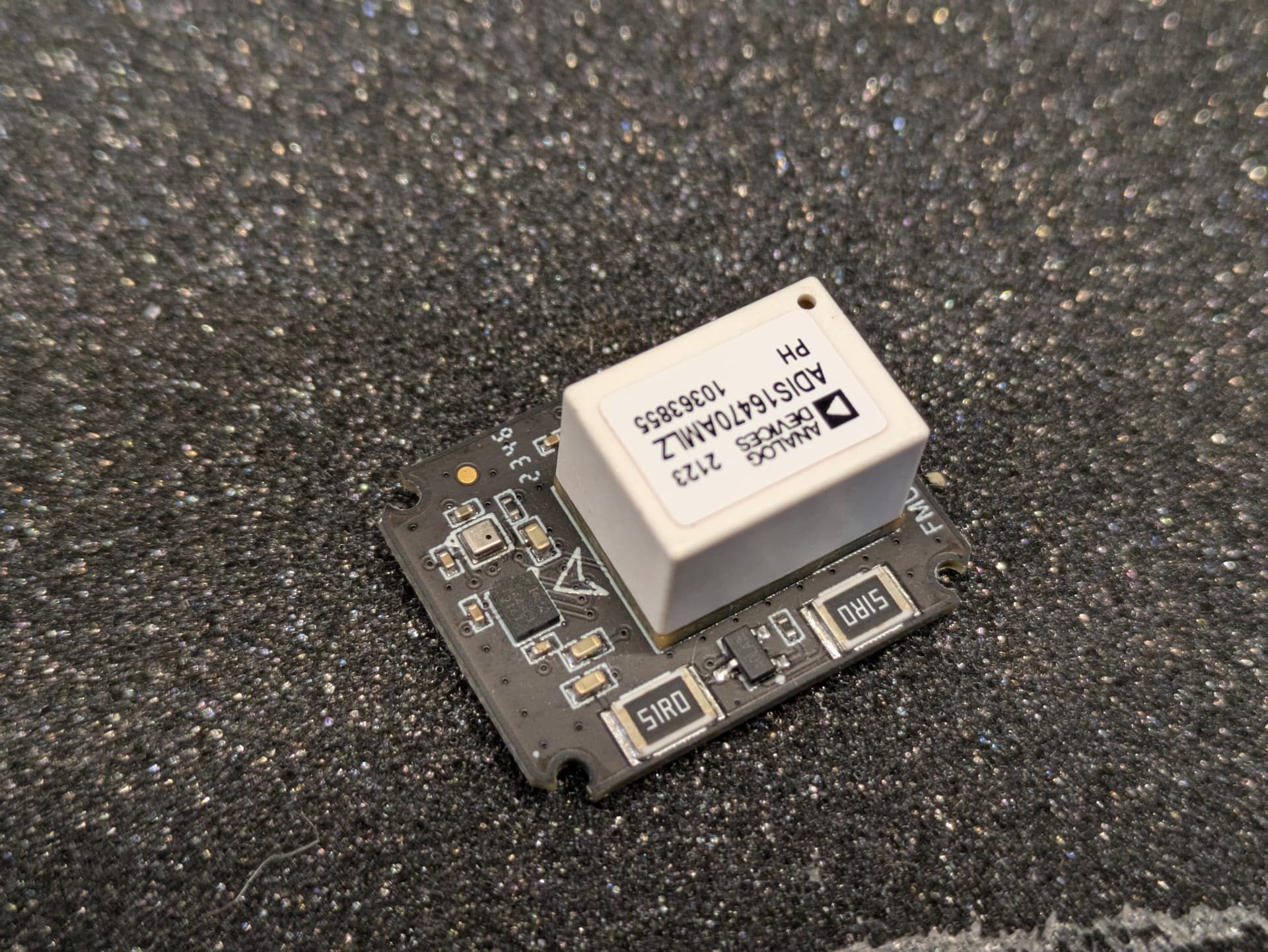
Here are a bit of photos of what we have design and had some flights with:
It looks very appealing, but for greater reliability, you should focus on an external IMU module with heating and vibration isolation on an additional layer.
I think there’s no need to look at external IMUs, as ArduPilot’s built-in sensor processing is very good.
What I mean is that the IMU sensors inside the flight controller should be moved to an external vibration-isolated layer, similar to what CUAV does with the X7.
which architecture would be better for implementing an “external” IMU module with fast sampling?
The goal is to unlock the full potential of the Notch filter using physical vibration isolation.
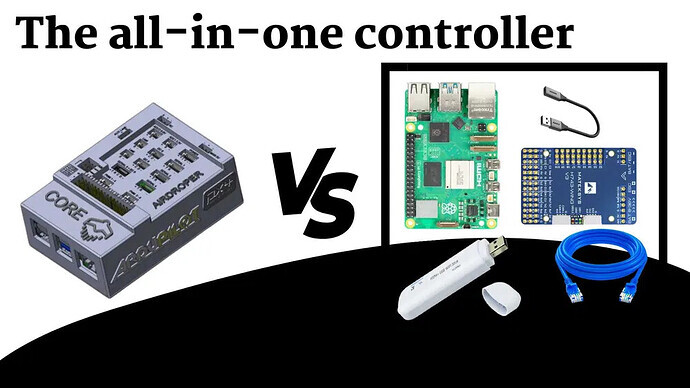
okay, overall do you think the idea of Navigator flight controller feasible if we make a IMU similar to CUAV X7 on a separate board. It uses raspberry pi 4 or 5 or any other linux board, there is no STM32
Using linux makes ensuring reliable real time performance harder.
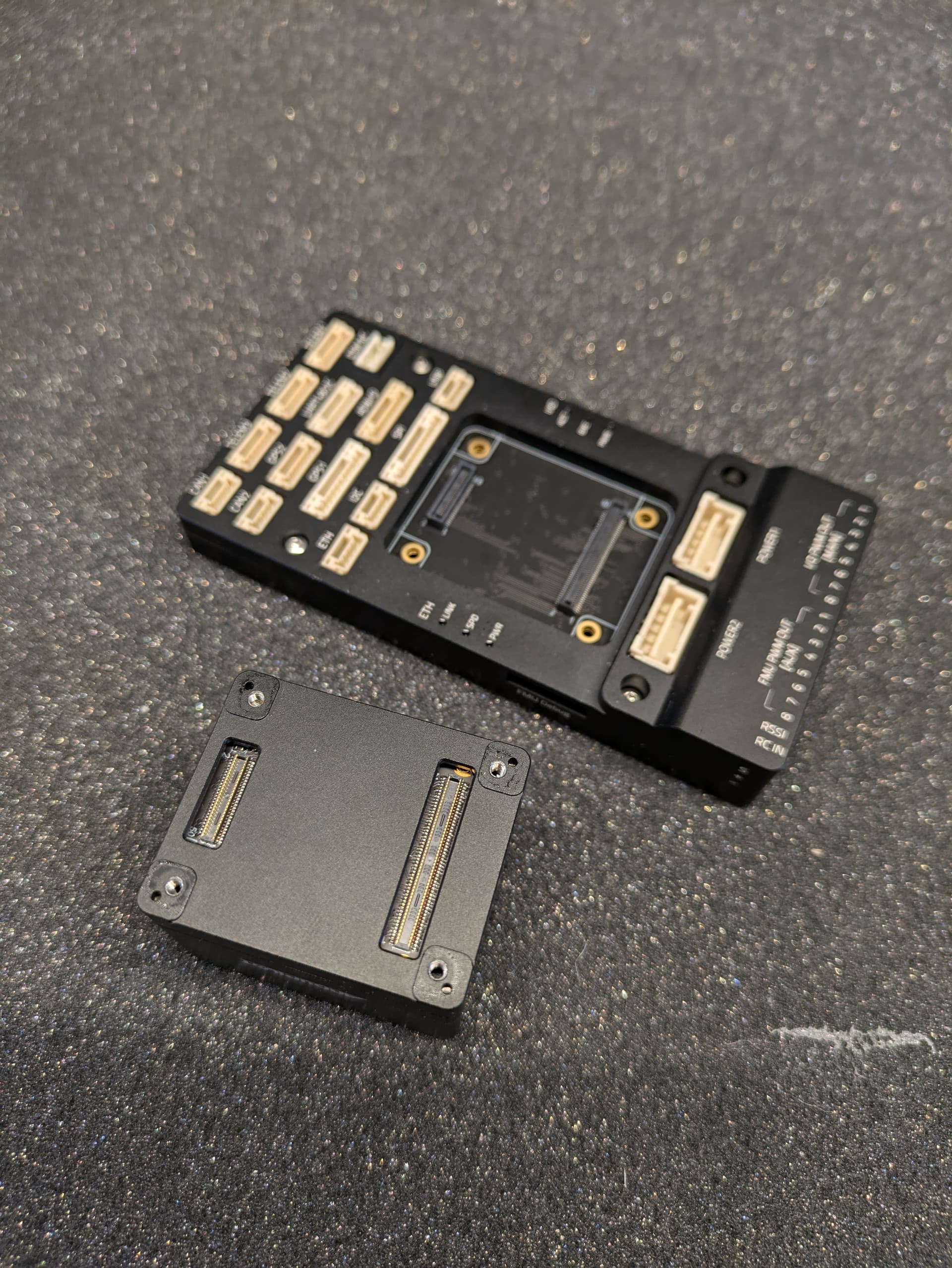
AFAIK on boards with isolated IMUs they are connected directly to the primary processor just using flexible ribbon between IMU PCB and the main PCB there also is an additional weight attached to IMU PCB that is an important part of vibration isolation setup.
If you want to do vibration isolation with some material you need to characterize your vibration first. Any material have frequency reduction and harmonic so you cannot use random stuff to isolation unknown vibrations…
If you want an external IMU you can just connect it through SPI/I2C or whatever bus you want
Okay,I see that CUAV X7 has all the files open source. We can no problem order their PCBs assembled with components, do they have a 3d model or is there some 3d model on how to implement vibration issolation of IMU? Also, are there any quadcopter stacks such as speedybee f405 v3 to take a look at the implementation of general schematics and how ESCs are in sync with the main board
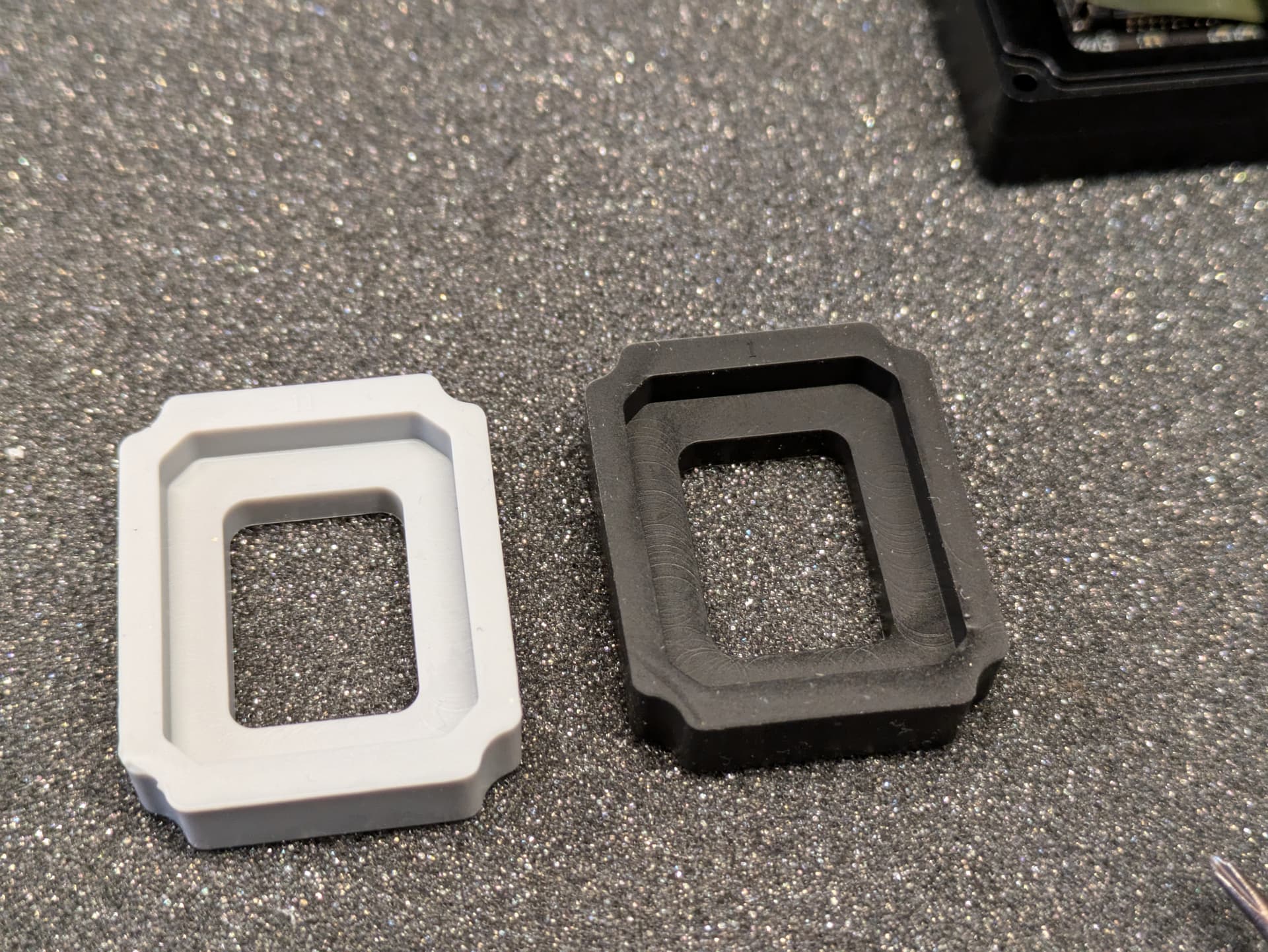
The entire IMU is placed on a separate layer with silicone dampers and connected via flexible cables.
This is a very good solution because it allows customization of the sensor set being connected.
CUAV is an example of commercial design—they make nice cases, but their hardware leaves much to be desired.
I’m confident you can do better.
What about Auterion Skynode X flight controller, it seems to have some different type of IMU mounting, are there any photos of disassembled Auterion Skynode X in public??
Hi!
Nice project!
One point of caution: You know the ardupilot restrictions in terms of use, please don’t give any reason to believe you might not care of them…
There is no universal solution for vibration isolation. A working solution depends heavily on the environment (frequency of the noise).
Take a look at the Holybro Pixhawk 6X Pro. Andy Piper did a blog post with a video which shows its internals. It is provided with two different pairs of silicon isolation.
I can share some pictures of it if you need some additional information. I also have a CUAV X7+ (not pro) which might be also interesting. The Cube has also a similar approach. From my point of view, DJI Naza was the first flight controller which did this kind of cube-shaped vibration isolation.
The IMU Board typically needs some additional weight which is matched to the characteristics of the isolation foam/silicon and the frequency range it’s working in.
Also the connection to the MCU needs to be as light and flexible as possible. Typically ribbon cables are the way to go.
Regarding the selection of IMUs there are a lot of options.
I really like the new TDK 4xxx generation in general.
The newest Cube Orange + Rev. uses three ICM45686, one hard mounted, two isolated.
You linked an external IMU with MPU9250, thats a very old generation IMU and not recommendable anymore.
IMUs are connected always via SPI.
Heating system is nice to have if you are planning long flight times (reduced IMU drift).
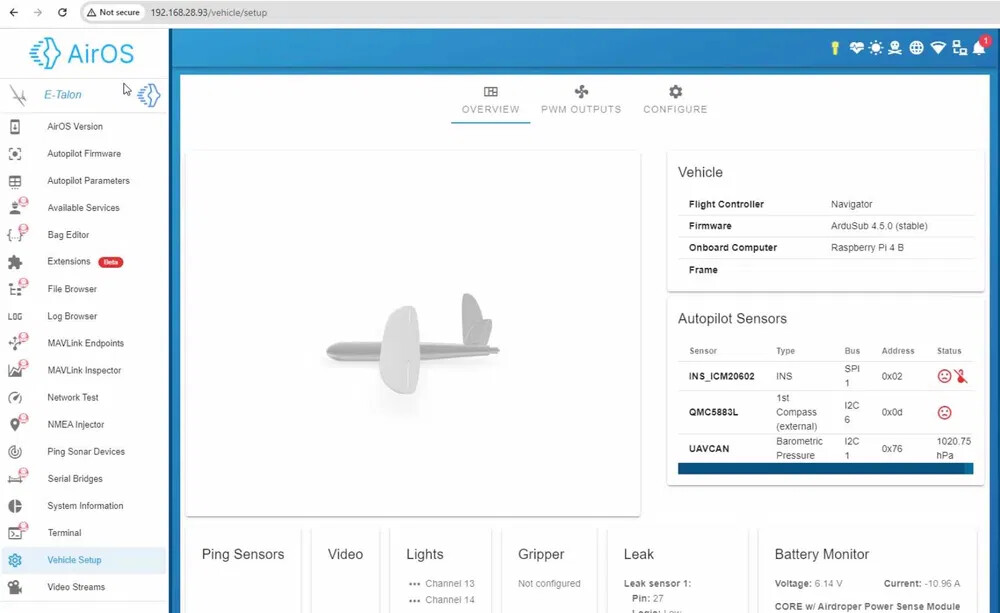
The RM3100 compass is currently the best i know of, the cheap QMC5883L (seen in your screenshot) i worse than the old Honeywell HMC5883L and probably not a good choice.
As you are working on quite a big project, it might be worth to consider using Cube Orange+, CUAV X7+ or Pixhawk 6X IMU/MCU Module and just make a compatible carrier. All of them are meant to be used on custom made carrier PCBs.
Pixhawk 6X solo: 127$
Cube Orange+ ~220$
CUAV X7+ solo: no price found
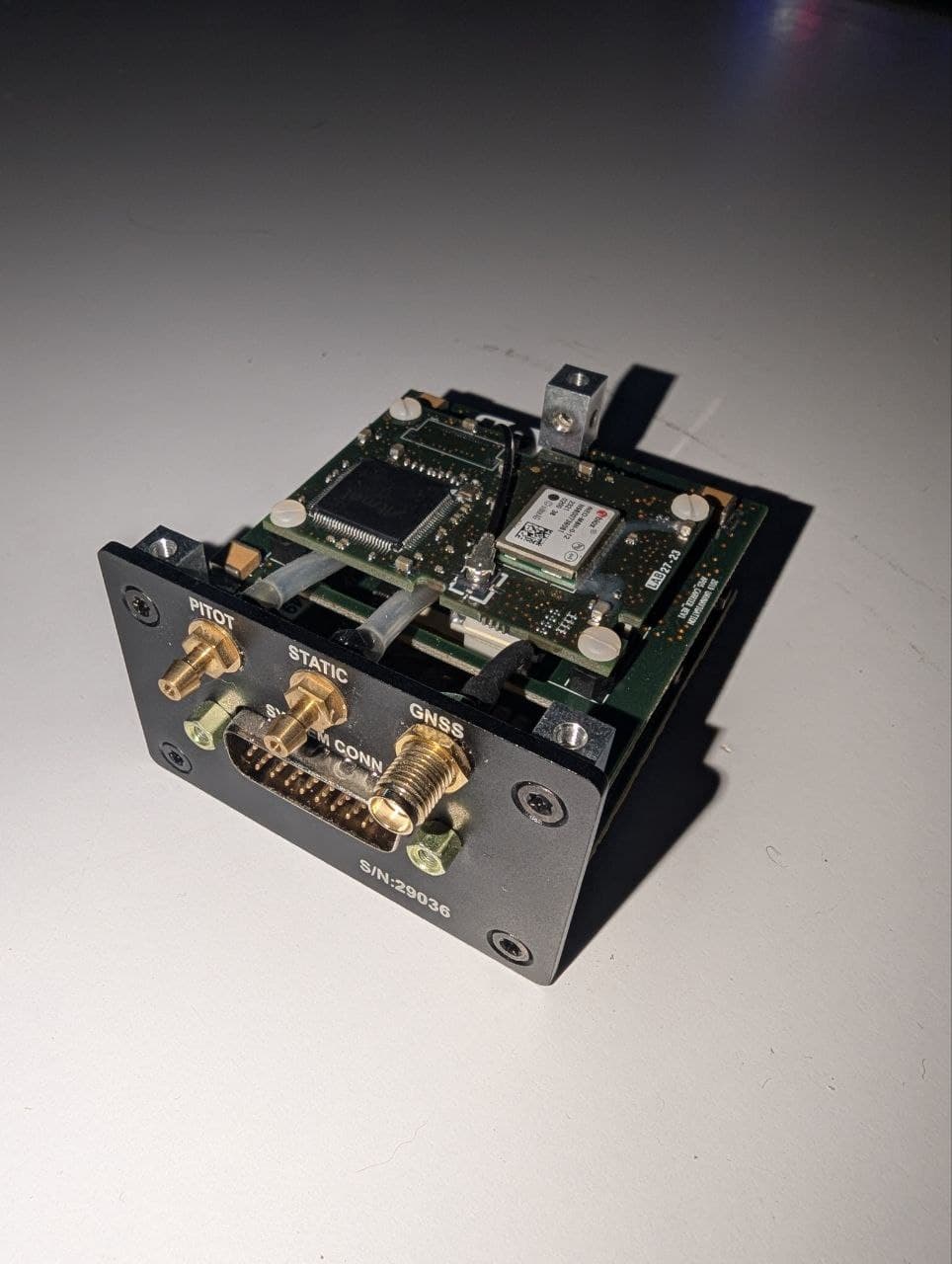
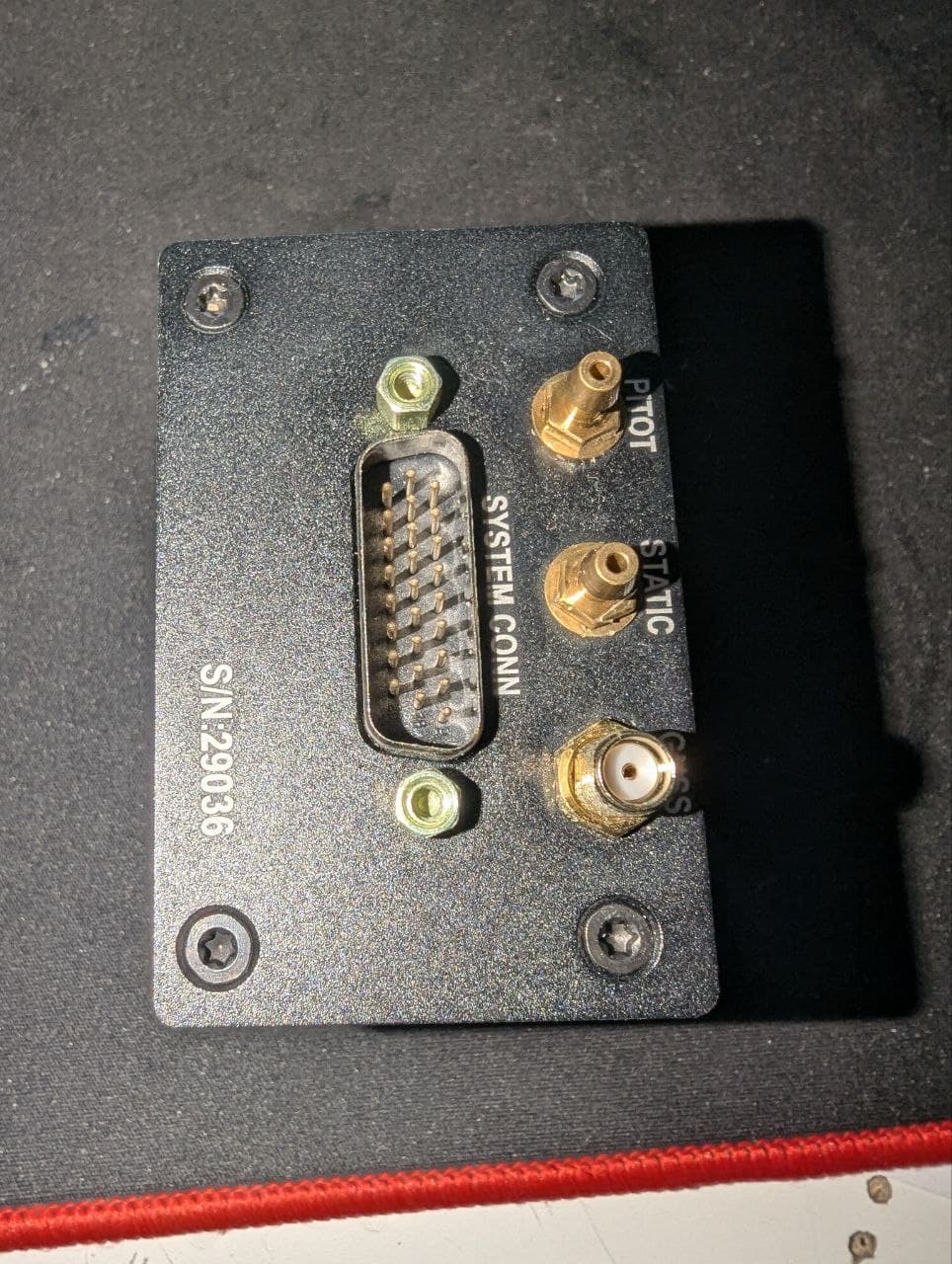
Okay, very good thoughts. Thanks for the advice. Can you share some picture of the insides that you have? I have CUAV x7+ and Cube Orange Plus on me. I will disassemble cube orange tomorrow to check the insides. I also have a Vector-600 autopilot on me, it looks quite simple on the inside. I will attach some photos there
I got another idea today: Put your favorite FCs in IMU RAW logging mode and carry them in the payload section of your UAV all together on a test flight.
You can see how well they perform in your exact UAV. Do some FFT with the ardupilot web tools to see the noise impact: https://firmware.ardupilot.org/Tools/WebTools/FilterReview/
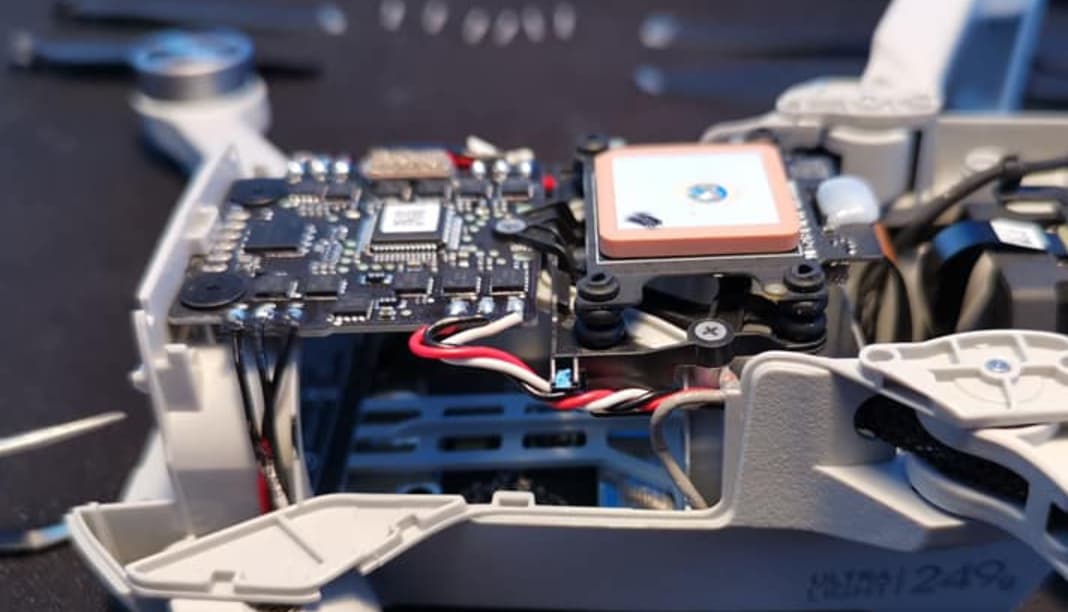
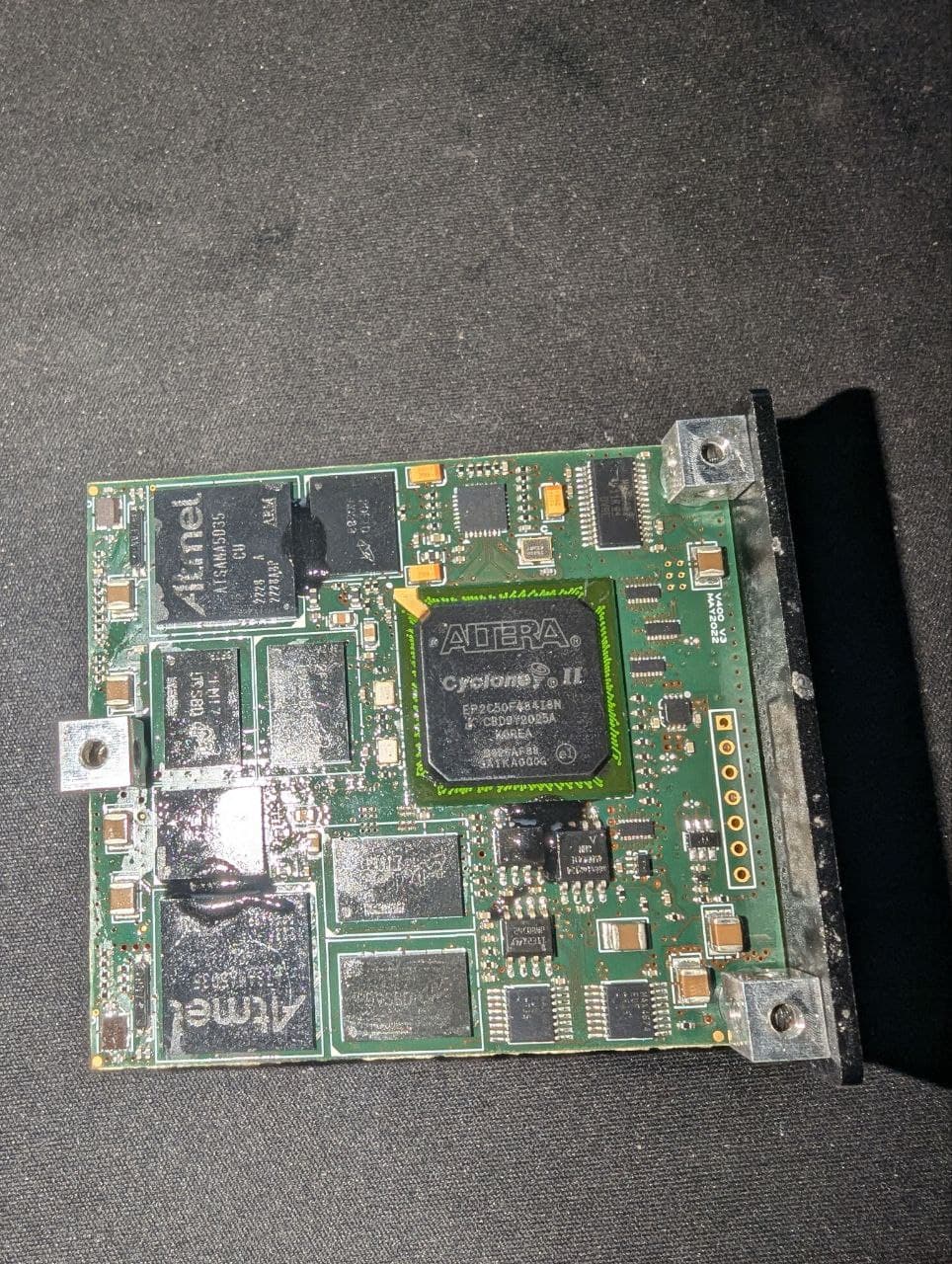
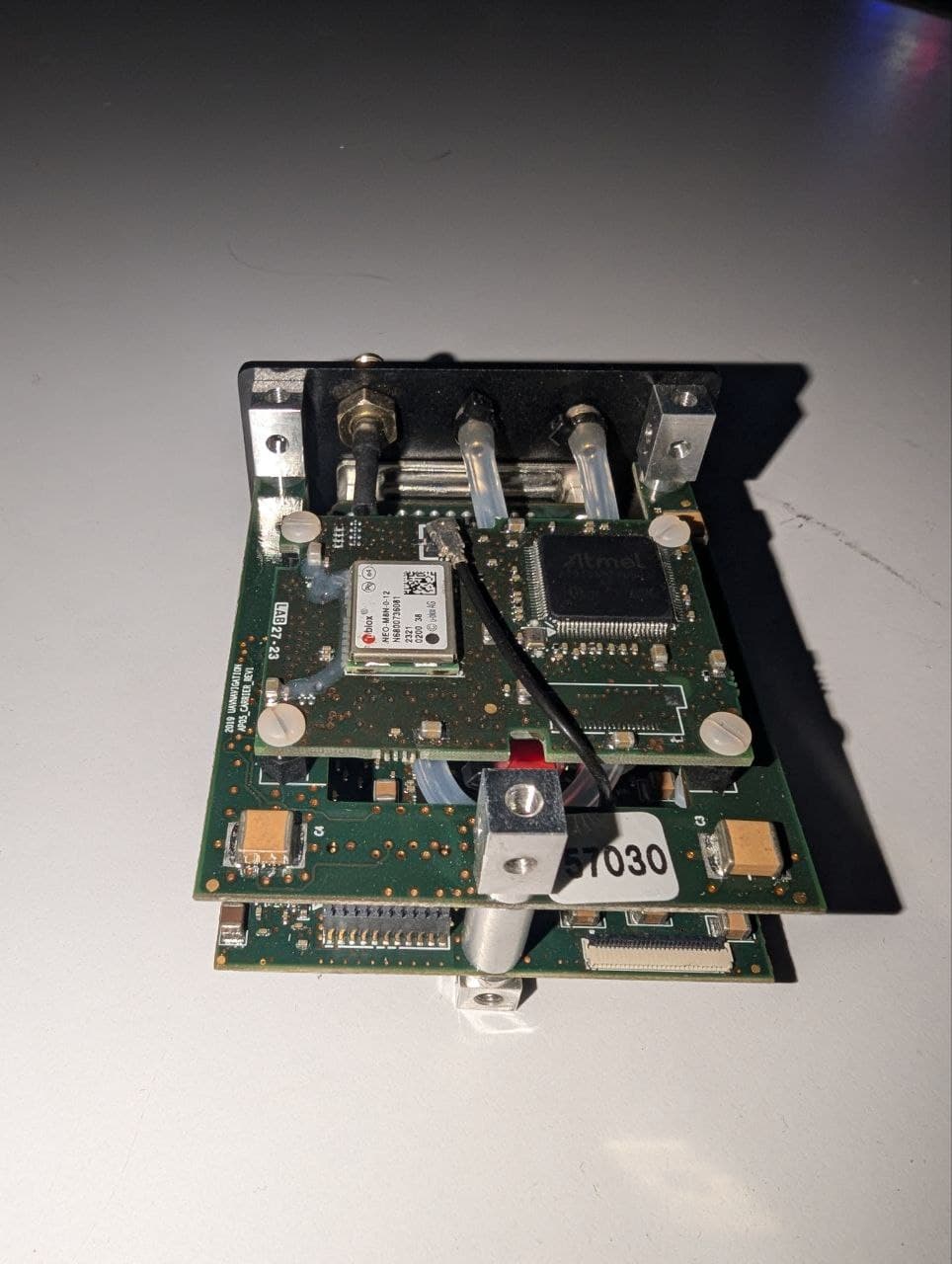
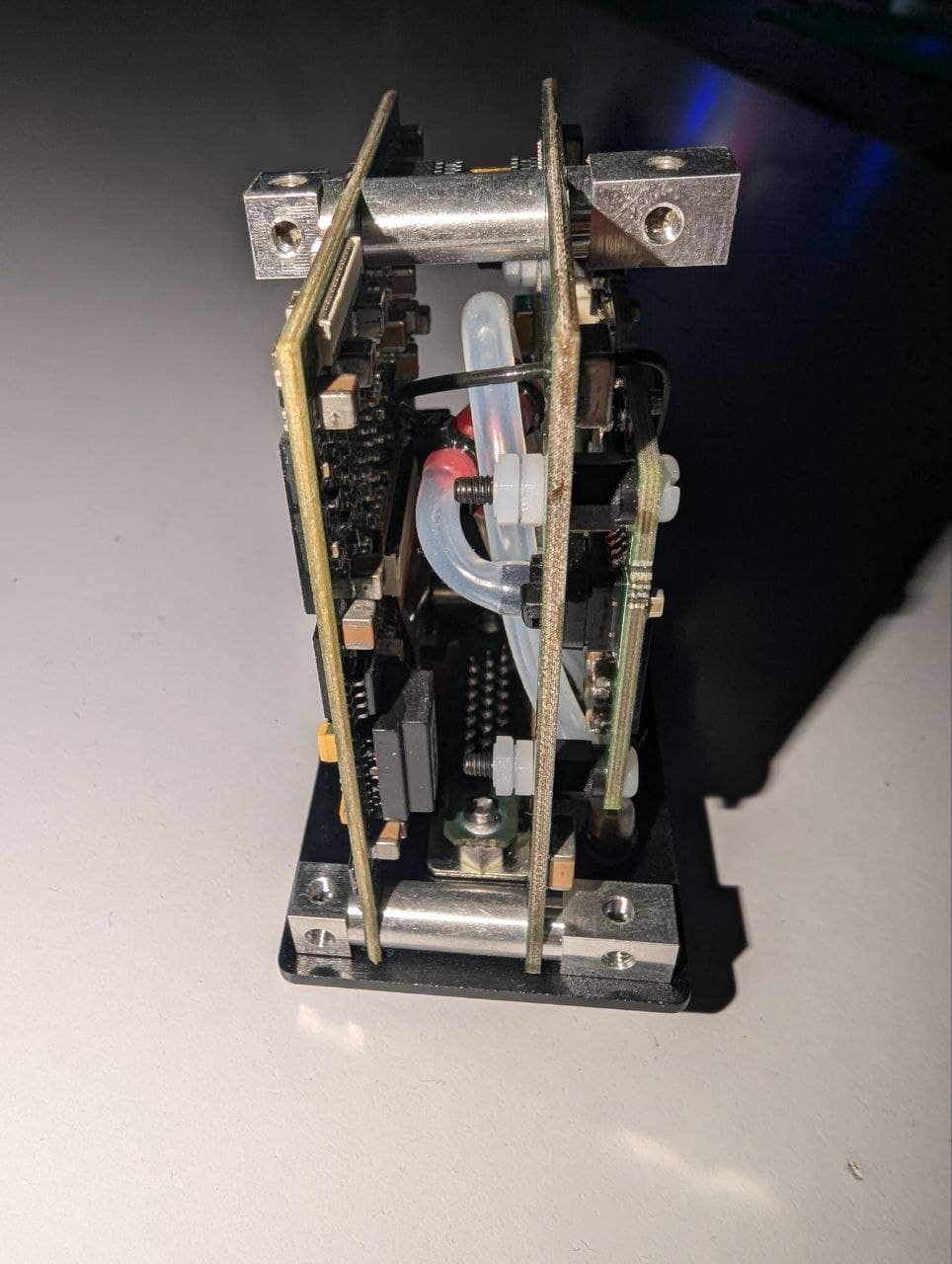
Uff, i thought there would be much more advanced Hardware inside.
Relaitvely old FPGA, two Cortex-A5 MCUs and an old basic GPS Receiver.
No IMU isolation?