So, it all starts as usual. It’s christmas and for whatever reason and you get the idea to build something weird.

As a short background, the last years I worked on coaxial TVC solutions, but never had the feeling (and the result) that I understood everything because…there is just too much wind blown, aerodynamic becomes manaic and really strange things happen. Flying yes, but good flying…no. Hence, I decided for myself to stick with thrust vector control, but to separate the coaxial props to a tandem- or bicopter arrangement. Make it easier! Yes…for sure…
Ok. each of the two rotor units can (thinking in chinhook configuration) rotated around the pich axis and roll axis, while yaw is motor differential and thrust is, thrust. I found on ardupilot discourse some Bi-Copters, some Bi-Copter with OAT (Oblique active Thrust) and Tandem helis, but no fully articulated like that one.
As you can imagine, it took some iterations to get to a somewhat decent, or acceptable build.
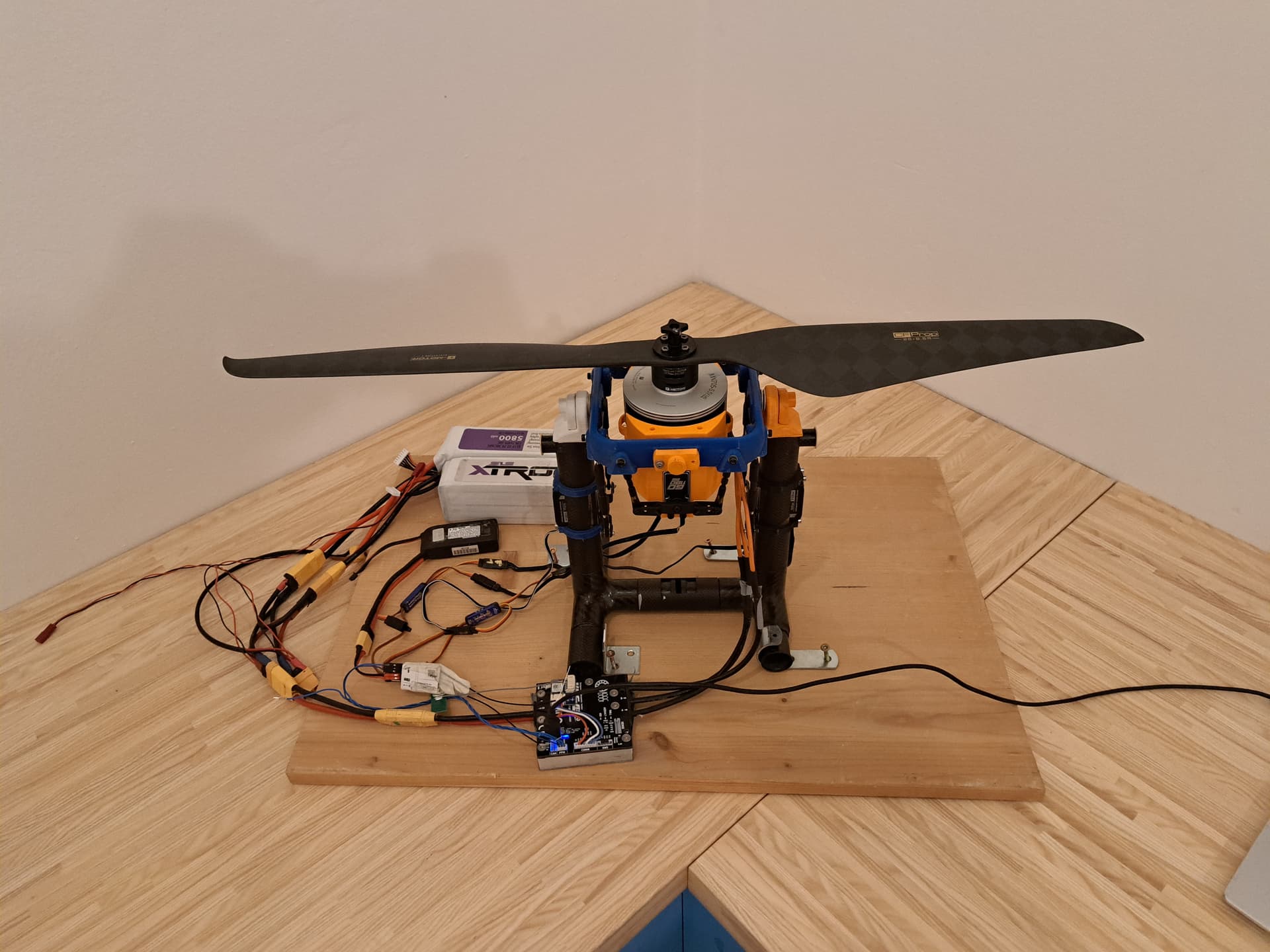
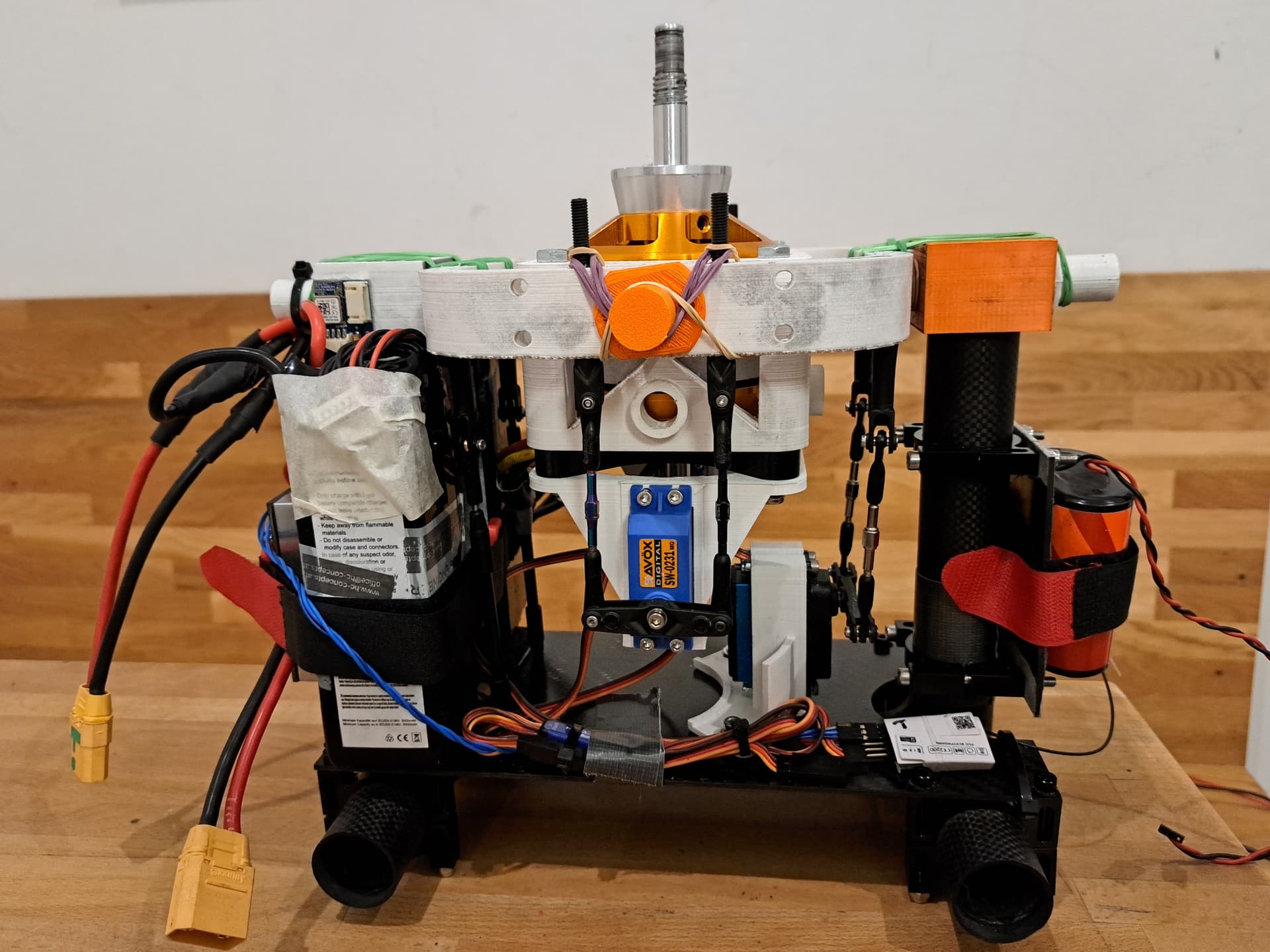
You may wonder why I use 2 actuators per axis. One one side I was interested if I could get them run simutanoulsy without blocking or additional load (yes, this was easy). This was also because I like redundancy. Moreover, I was really scared on the possible acting forces. Especially my very first build had a pain of oscilations which pretty much destroyed the servos, the gimbal frame and the linkage.

But it is all about learning. Ligher motor, lighter and better balanced props, stronger servos. Redesign everything. And testing.

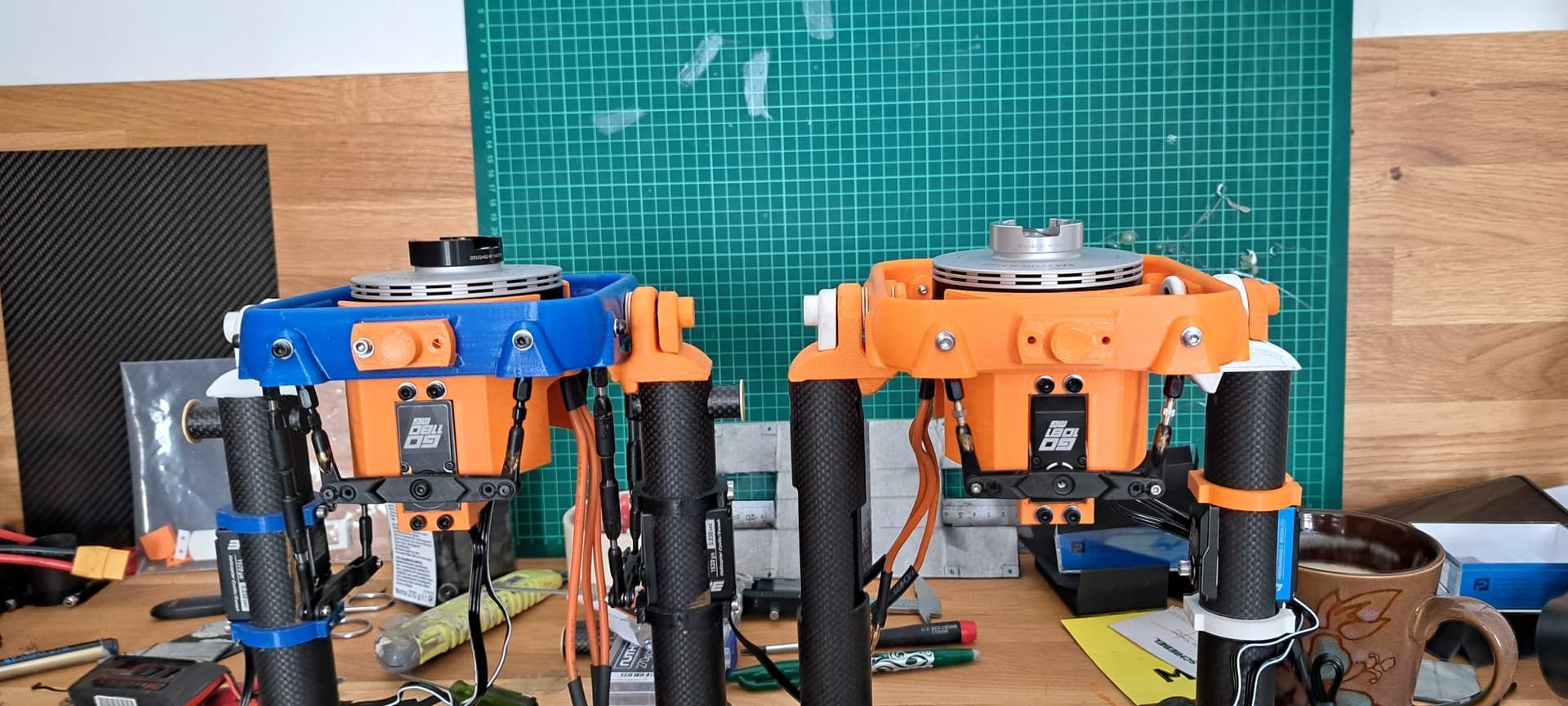
When I was satisfied with the operation of one unit, I started to build the second propulsion unit.
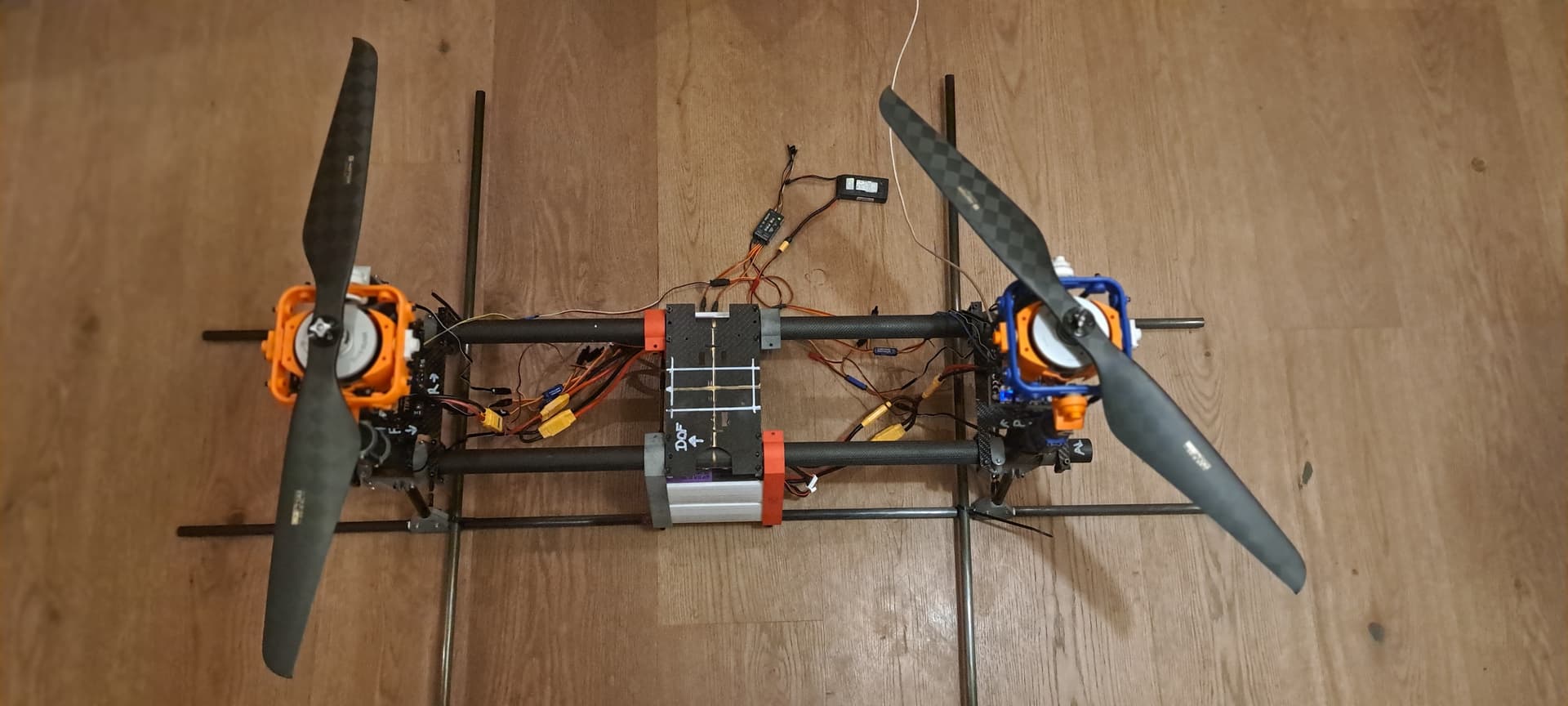
And then, finally putting everything on a common frame.
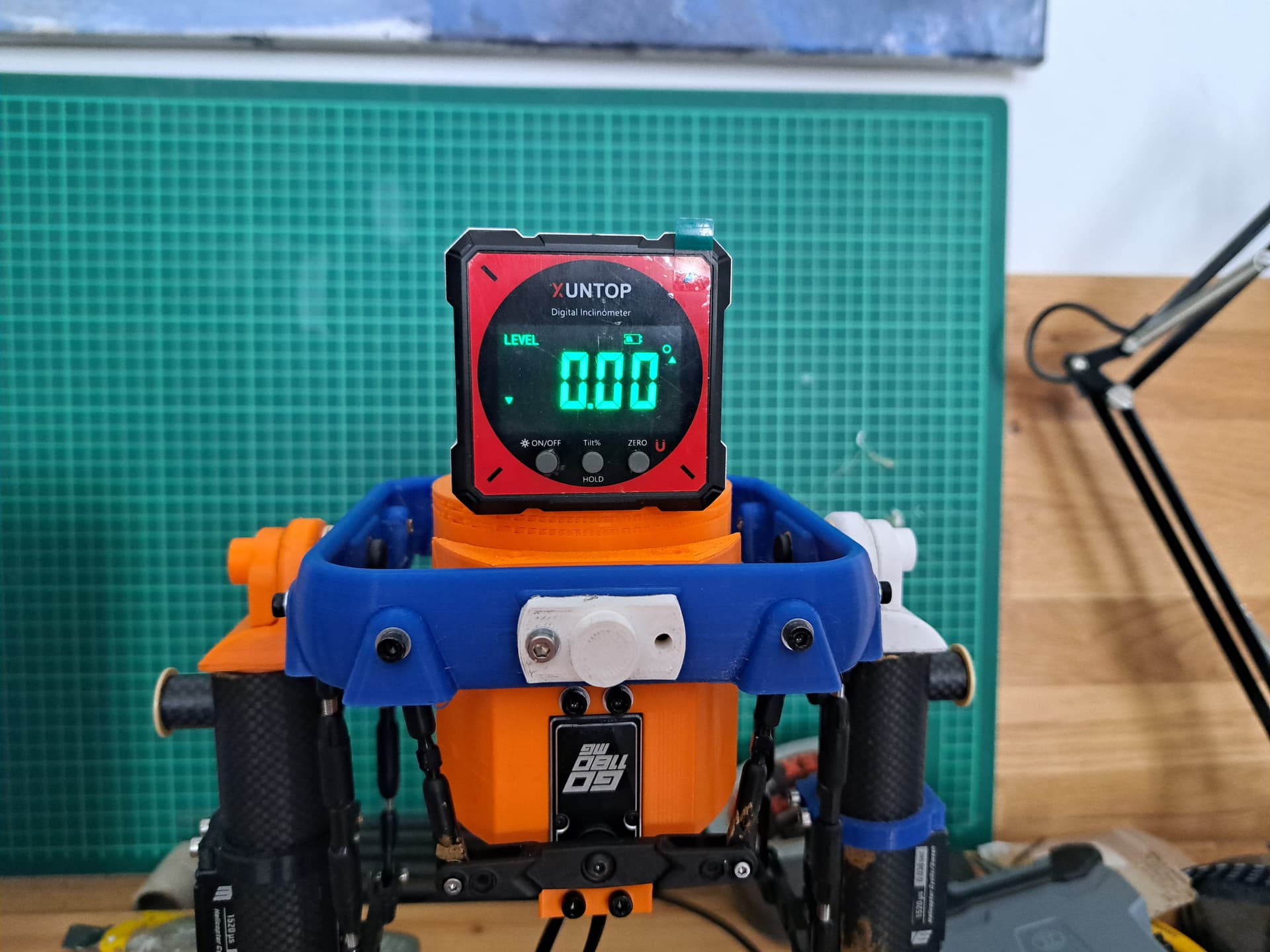
It took me a little, but not much, to calibrate the two units together (ok. there is still a small missmatch, but, we’re talking about 0.05 to 0.15 degrees.).
What was my design mass? 8kg with batteries BEW. What did I achieve? 8.5kg, but with additional sensors, I did not take into account. My design is fully symetrically balanced…and the CoG is ALMOST where I targeted…just a tiny bit off because of stupid cables (…).
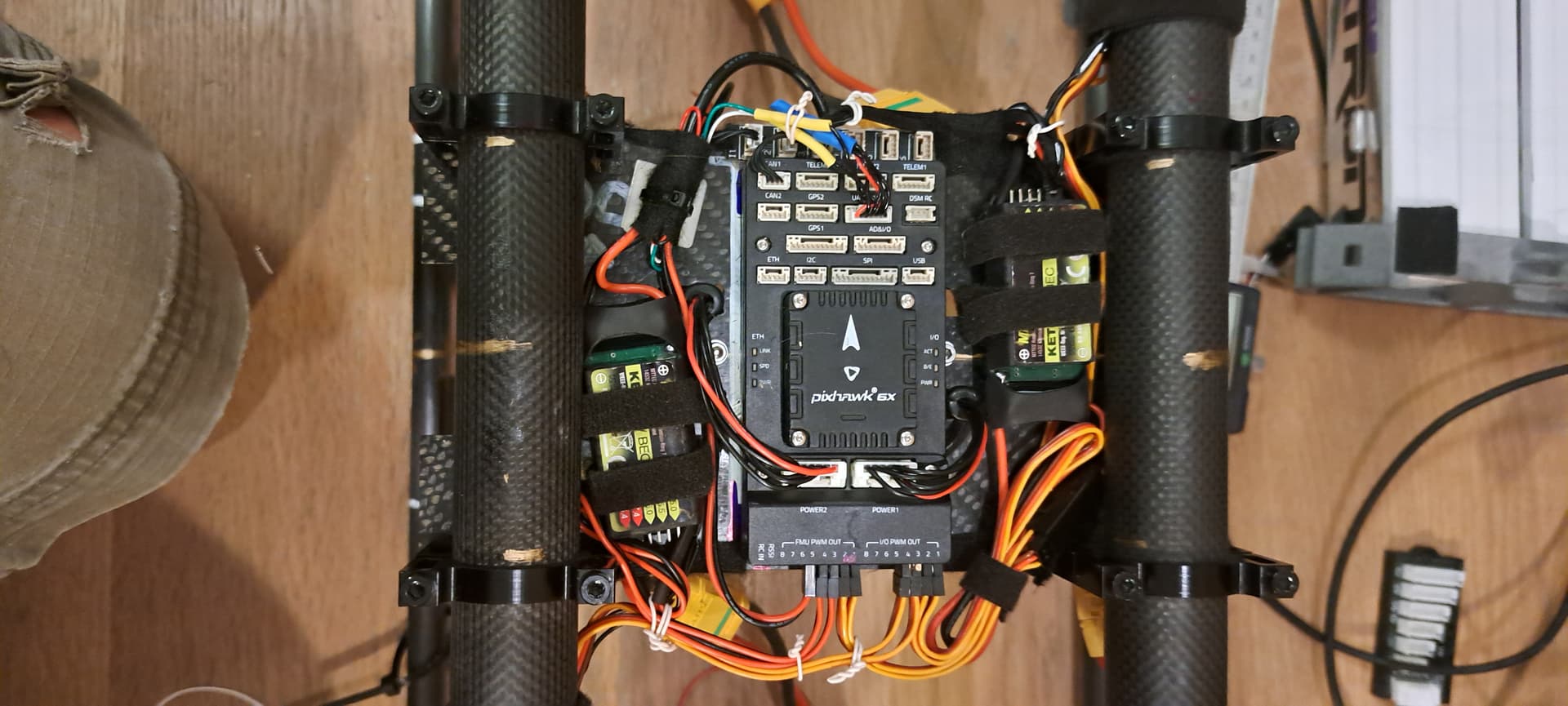
The Holybro 6x with the latest Arcuopter 4.5.6 loaded sits in the middle. The ESCs are VESCs 6.0 (I have good experience with them and they support UAVCAN).
.
Control works (it took me some nerves) to get all servos and the ESCs up and running…into the right direction. Always kind of funny that if you orientate the ardupilot into the right direction, the RC input does exactly what it is supposed to do, the AP corrects the roll correctly, but pitch corrections are reversed and I ask myself desperately…why? (unit I reversed the pitch on the RC side).
So, times to go into the wilderness.

And here I stop with my story and start to ask questions and suggestions, because it was not going sooo well. Not bad either (nothing burned down, nobody got hurt). But new rotorblades are need for sure.
I selected the COAX frame, because, instead of having flaps, I turn simply the the propulsion units. This should work. One little strange experience I have is, that the two motors should run up at the same time, but one is always slightly behind. If I change the nodes (CAN) it is visa versa, this indicates that it is not an ESC issue (I will verify). But my fault on the other side was that I selected “current control” (~torque] on the VESC instead of RPM control. This is something I can try, but I also saw this also already on the COAX I build (with RPM control turned on ![]() ). I am not sure if there is somewhere a native offset in the COAX config due to the assumed different rpm (or produced torque) of the upper and lower rotor blade.
). I am not sure if there is somewhere a native offset in the COAX config due to the assumed different rpm (or produced torque) of the upper and lower rotor blade.
It is NOT very stable, even though everything is very balanced and masses are somewhat distributed (I know false pendulum effect), but an equilibrium of inertia is good for balancing.
My question is, the dual-helicopter / tandem configuration would be an alternative frame. Since this is very simular to my configuration BUT not the swashplate and HENCE not a collective. Does anyone know if the collective could be set to unused and replaced with motor rpm instead?
Alternative would be bi-copter but then I either need to lock one servo axis or do some OAT approach.