Hi all - I’m new here, take it easy on me 
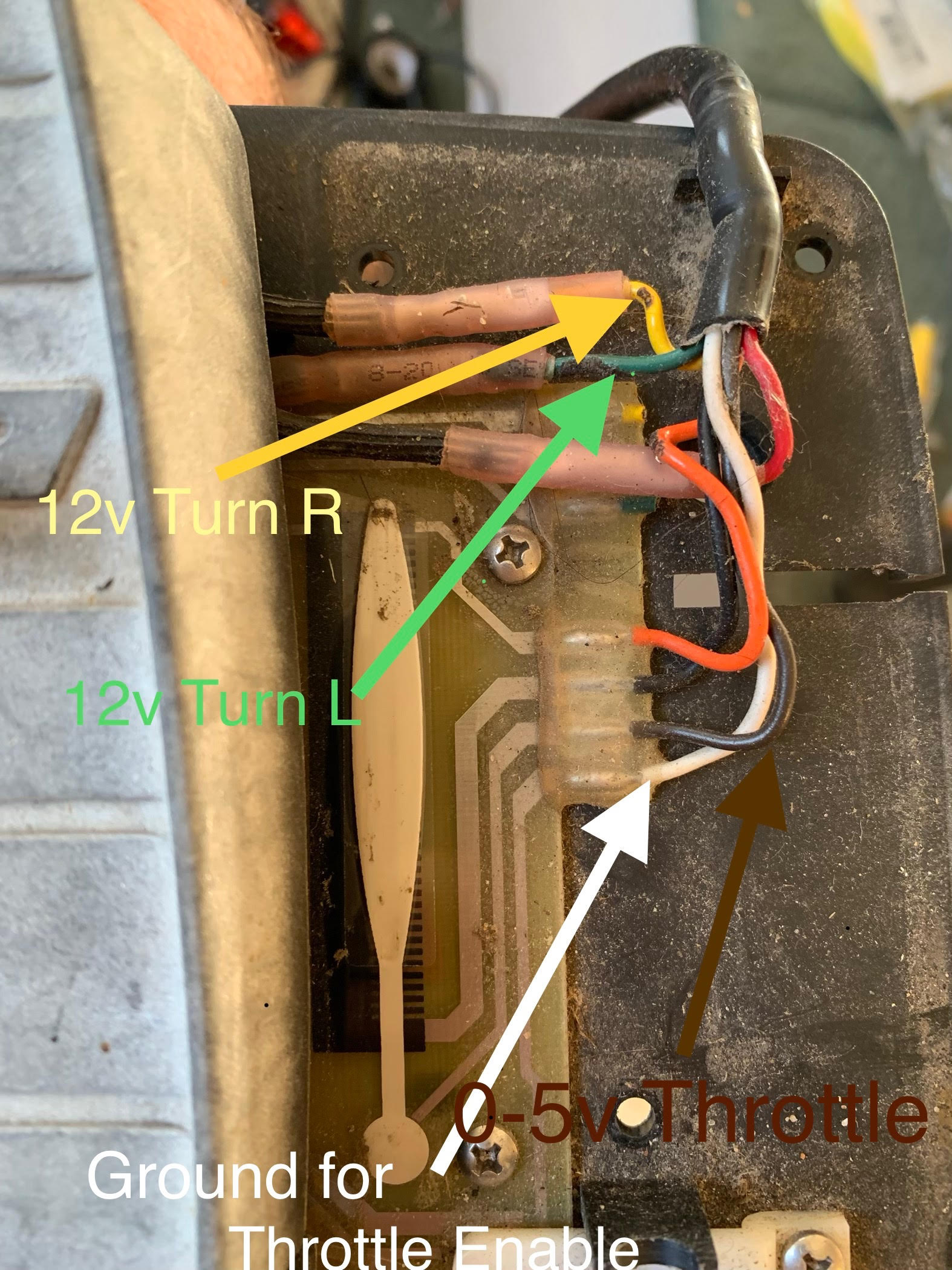
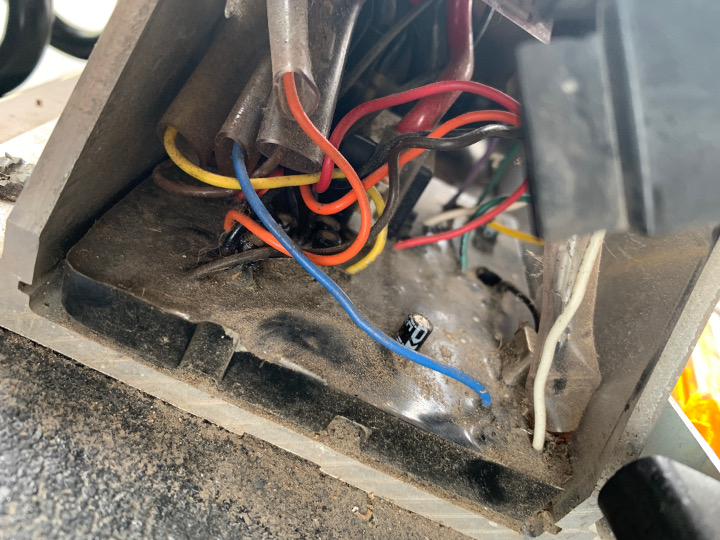
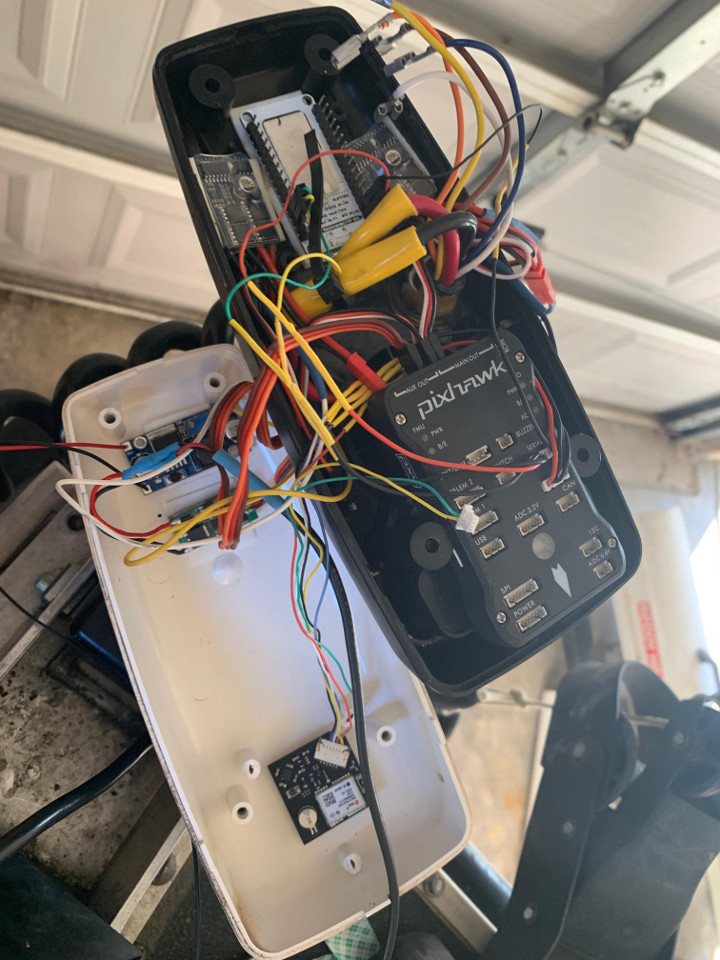
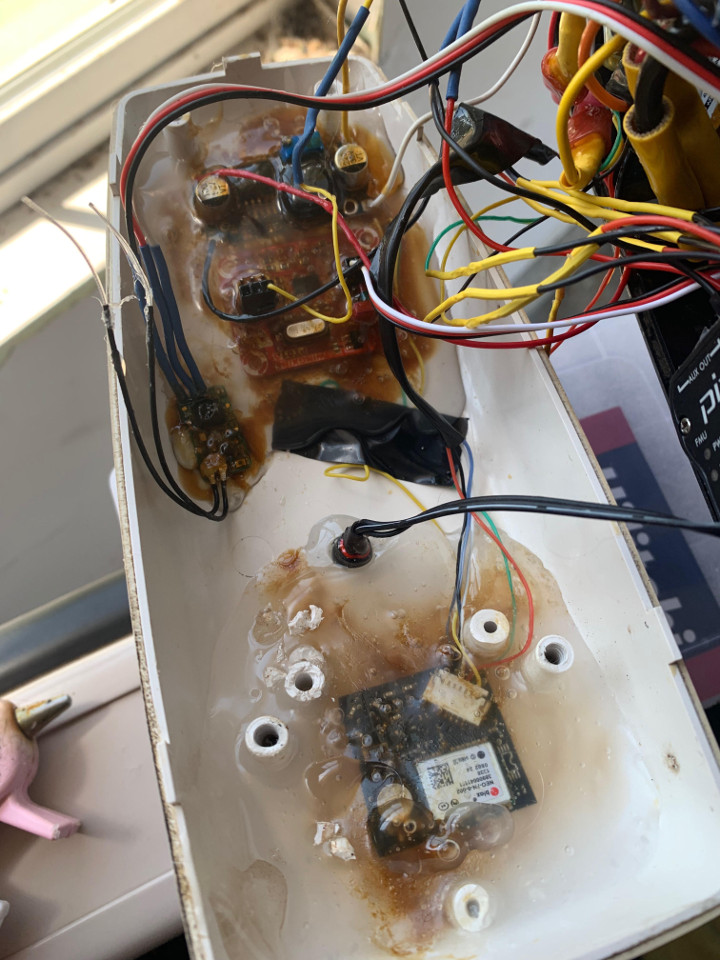
I’ve decided to try to use a pixhawk to upgrade my Minn Kota bow mount trolling motor on an 18’ fishing boat as a diy (fun project) solution to their commercial iPilot product. All of the hardware reverse engineering is done and the pixhawk is able to control the steering and thrust on the trolling motor. I’ll try to put up a post documenting how I did it once everything is working properly to help others since it’s been a fun project so far.
As I’ve been working on tuning, I’ve quickly run into one pretty big issue. Since the pixhawk is mounted inside the top pod on the trolling motor, “ground steering” directly controls the heading of the motor, regardless of throttle or vehicle speed. Admittedly I’ve not done much tuning, but I’m having an issue finding any PID or FF settings that will “lock on” to a compass heading in acro mode. What typically happens is that as the back of the boat swings one direction, the motor will stay pointed at the set heading within 1-2 degrees(good), but then when the boat swings the other way, the pixhawk will allow the motor to stray off heading 20-30 degrees before any correction is made (bad). Does anyone have any suggestions on what PID settings might be required in my situation where the heading is directly controlled by the steering motor? I’m not sure that any PID logic is even required for low level steering in this situation. I’m away from the boat right now, but I could send a log file later.