A serious crash two days ago motivate this first post on the forum. I would appreciate any help as I can’t find myself any explanation.
Here is my config : Arduplane 3.7.1, pixhawk, conventional custom plane (3 axis, 1 motor).
The crash happened during the second flight of the day. The firts flight didn’t encounter any problem. Both were survey flight in auto mode, including auto takeoff.
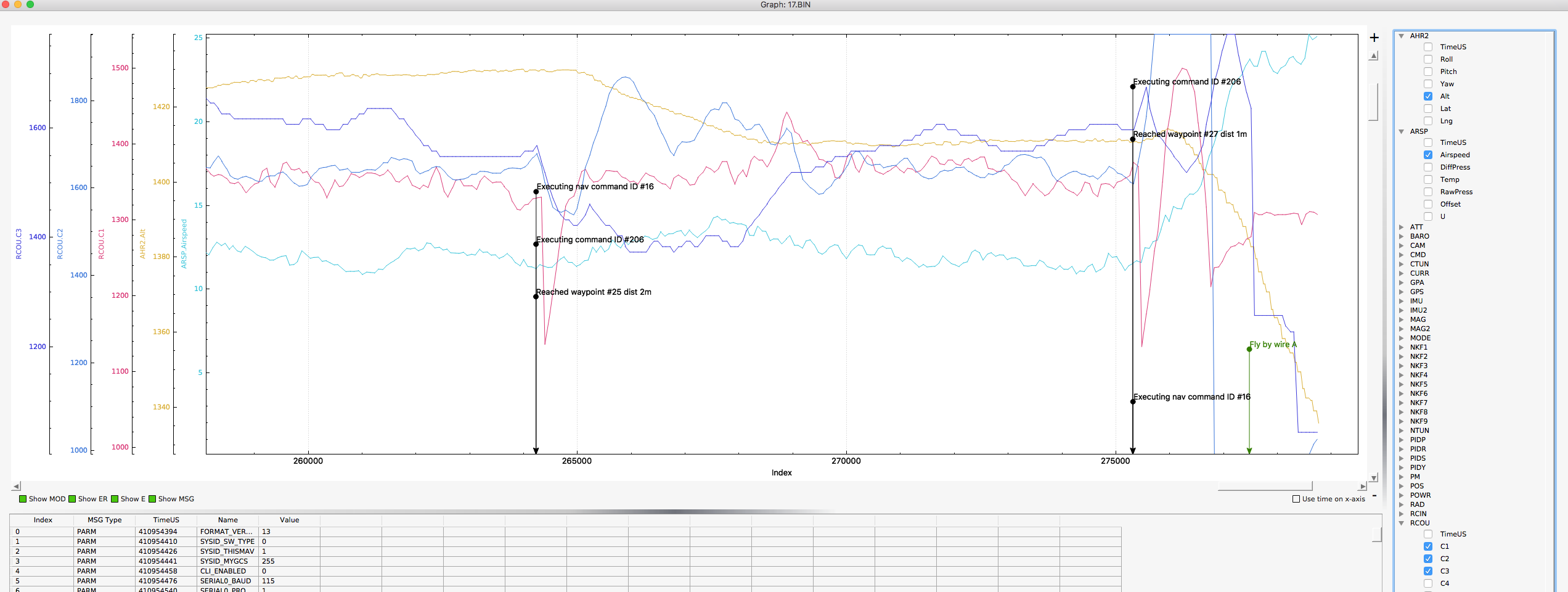
After log analysis, it seems that the problem occurs just after switching from waypoint #27 to waypoint #29 (#28 was a DO_SET_CAM_TRIG_DIST command). Then the desired pitch doesn’t change significantly, but real pitch goes to dive and RCOUT_pitch value rise to >2000 (i.e. full pitch down).
I can’t exclude totaly a mechanical failure, but it is unlikely.
As the plane is rolled the expected elevator input happens at the same time instead of after, is excessive, and goes to max, where it stays for a short while.
Ailerons also move in the opposite direction as your elevator goes to min and stays there.
I did notice that RC1 is never centred.
Was there a reason for this in the setup?
Here is what I have looked at
You haven’t mentioned anything about the air-frame type or construction.
Hi Mike,
Thank you for paying attention to my problems.
First of all, I must correct something in my description : I wrote that RCOUT_pitch value was full pitch down when reaching ~2000, but in fact it is full pitch UP !
Giving that point my hypothesis is now that when switching to the next waypoint, the autopilot has began a stronger turn leading the inner wing into a stall and the plane in a spin.
This case seems to be a known issue (Cf : http://discuss.ardupilot.org/t/unrecoverable-spin-crash/11384/3
Do you think this is possible ?
Concerning the RC1 not centered. you are right. I never noticed this. Will investigate.
Be carefull, in your picture, you have ploted RCOU for C1 , C2 and C3. But my configuration is C1=yaw, C2=pitch, C3=throttle and C4=aileron.
Assuming the origin of the crash is a spin, I feel more confident in the Ardupilot software, but less in my plane !
When the plane will be repaired, I will change some settings. For example the bank angle was 45°. Maybe a value near 30° or 35° will be safer ?
Also the minimum airspeed may be leveled.
Any other advice to avoid stall or spin in auto mode ?