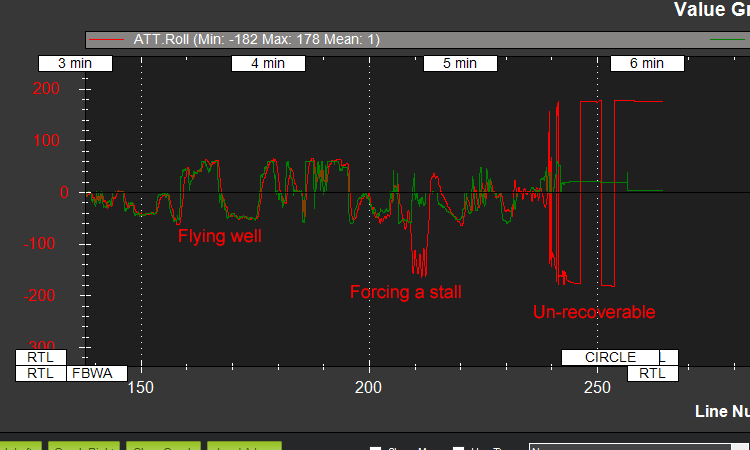
First off, thanks for the great software!! Plane 3.6 has been rock solid. However, I have found an issue in 3.6 and 3.7. FLying wings can but put in a “death spiral” fairly easily by stalling a wing. The UAV Mapper flying wing has a gentle tip stall, and will immediately recover in Stabilize or Manual, mode. However, in guided modes FWB, AUTO, or RTL, the spin will not recover. Once started, there is nothing the pilot, or autopilot can do to recover. The plane will spin to the ground. This is not a random event. It will happen every time the airplane is put into a spin.
Stall detection and recovery is the major issue with Arduplane, If the plane stalls, it almost always ends in a death spiral and crash with any type of airplane. I’m not sure why there is not more emphasis placed on developing a solution to this, however, I know it’s been talked about and Tom was working on it at one point.
Ardupilot does a great job of avoiding stalls, however, it’s not possible to always avoid a stall, some sort of stall detection and recovery would be extremely beneficial. Even if it did not work for all airframes, a basic solution like leveling off and applying up elevator is better than the current death spiral.