Hello,
I’m new here, but I have a big problem and nobody could help me till now.
Problem description.
I crashed my drohne and had to buy me a new arducopter module, because the crashed one did not react anymore.
Now I received the new one and tried to setup it via the Mission planner (ver.1.3.66). I tried to load the firmware and it seems to work. Message said that the upload was DONE.
Now I tryed to connect to the board, the connection symbol turned to green but the appearing window “Connecting MavLink” sait that he is trying to connect after a timeout count down.
But it isn’t successful “No Heartbeat Packets received”
Disconnectiong the new ARDUCopter board for at least 1 minute and reconnecting it, brings up the same result.
I tried everything I know. loading firmware with the wizzard stops with the windows “getparams… sysid…” Nothing happens anymore afterward, so I had to cancel the process.
Could anyone here tell me what is wrong here, I know it worked with the old one, but know???
After a major update, like nuttx to chibios, the com port number changes. Check the drop down list near the connect button, or check in windows device manager and see if there is any sign that your board is connected.
Before starting Mission Planner I checked every time the port which is associated to ardupilot. It is shown every time as ARDUINO MEGA 2560 (com3/4) depending on the port I’m using.
Then Starting Mission Planner 1.3.66 and the trouble starts after loading the firmeware.
I loaded customer firmware for the Board b2560v2, the board is recognized as retired but Mission planner did load the most actual version to the board, Download OK, Reading Hex OK, Upload OK and Verify OK too and this without a green connection symbol, It is shown as disconnected?
Now I tried to connect and Mavlink started, to connect to com3 and the mavlink stopped after a couple of seconds with a timeout message.
So it’s an old APM - I’d let missionplanner load it’s default choice on the board.
Trying to put a later version than copter 3.2 (I think) will not work.
Also with APM-Version 3.2 it isn’t working. I just took a look in to the terminal and here I could conneect to the board (surprise) but i see That the software was unable to Boot MPU5600 for 6 times.
I now stop all and hope for some hints who to solve the problem.
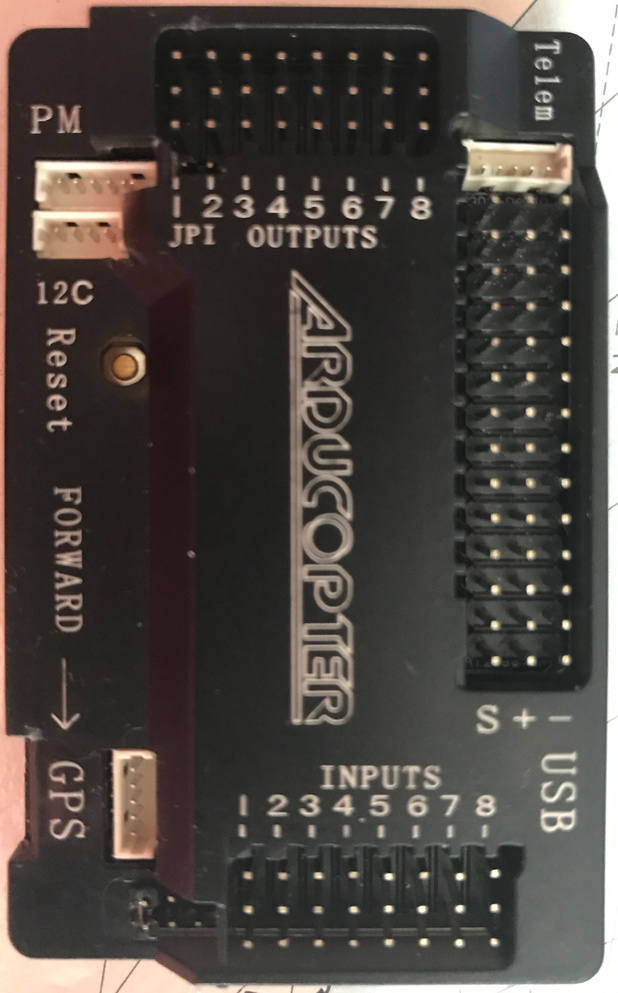
What kind of board it anyway ? Do you have a picture? Where did you bought it, it its from some cheap ass chinese aliexpress store, it is possible that the board itself is faulty.
Andras, You are right I checked it with some other boards getting from a friend of mine. It is, of cause, faulty. So there are no more answers required, and it is from china you’re right. But it’is one of the most common boars in the world i think
Do yourself a favor and spend some more money on the flight controller. And buy at least a Pixhawk1, but stay away from the white chinese clones.
Don’t use APM2.6 it is ancient, support were dropped three years ago, and three years in drone tech is like a millennium…
If you want to have a cheap but very well working pixhawk I can recommend the minipix from Radiolink. I am running 6 of them on small and also bigger copter. This FC is very good and I never had problem.
Your mileage may vary… MiniPix was the only pixhawk clone which needs a watchdog in software because some of them were freeze (not restart but properly freeze) midflight…
What do you mean with “Your mileage may vary…”
I was not aware that there is an issue with the minipix. So does that mean that with the watchdog you can avoid the freezing? Can you tell a little bit more about the issue?
Thanks
The fix relates to a flyaway that happened on a RadioLink
mini-pix flight controller. The mini-pix suffered a major hardware
failure that led to the main loop stopping. As the mini-pix does not
have an IO co-processor this resulted in fixed control surface outputs
and fixed motor output, which led to a flyaway. The plane was found,
but we want to ensure that if this ever happens again that the motor
will stop and that the pilot will regain control of the aircraft.
The fix is to enable an option in the STM32 processor called
“Independent Watchdog” (IWDG). The IWDG provides a mechanism to
automatically reset the CPU on software or hardware failure resulting
in the main loop stopping.
Minipix just a little bit better (if better) than the white Pixhawk1 clones. Cheap clone built from components with questionable quality.
Andras, I’ve opened up a pair of whites for visual inspection, and aside from some cost shortcuts - dumping the 3.3/5V level shifters for some resistor arrays for instance, and the missing diode on power input - the board quality is OK, and the only one that started misbehaving did so after a mechanical-induced aluminium-on-concrete hard crash.
Now the black clones bought off Aliexpress, that were even cheaper then the Banggood whites… those are the ones forgotten somewhere in the back of a drawer…
I myself went to F7 and I’m not looking back. Holybro seems to do a decent job with their boards. Yeah, we had that input problem because of the shared SBUS/DSM pin on the P4, but hey, compared to the Black Cube troubles of late it meant only unsoldering a MCU pin
I’m liking the Kakute F7 board also. It’s a lot of functionality in a rather compact form for $50. Other craft are flying/driving fine with the Pixhawk 2.4.8 (white one) and PixRacers but I prefer the F7 now. I should add that I don’t have a lot of $$ wrapped up in any of these vehicles and they re not carrying expensive gear otherwise I would probably use a Cube.
I HAVE GOT SIMILAR PROBLEM. I HOPE I WILL GET GOOD ADVICE, HI I AM A BEGINNER I NEED TO LEARN HOW TO CONTROL MY DRONE MANUAL I DON’T WONT TO GUESS THE SWITCH, I CONTROLLED MANUAL IT LAND SAFELY, NOW I WANT TO BE PERFECT ON MANUAL AND AUTO MODE,
i calibrated the radio controller, now i get the function of switch C, G, E, AND throttle, yaw/ roll switch .
My flight mode are as flows of Futaba 10j ,
1). @ switch C AUTO (Up) , E -has * STABILIZE <–> # RTL , G - Has * RTL <–># AUTO,
2). @ switch C ALTITUDE HOLD (CENTER) , E -has * STABILIZE <–> # RTL , G - Has * LOITER <–> #ALTITUDE HOLD,
3). @ switch C ALTITUDE HOLD( DOWN) , E -has * AUTO <–> # RTL , G - Has * STABILIZE <–> #ALTITUDE HOLD,
I NEED THE OPERATIONAL FUNCTION TO AVOID CRASH DURING LANDING, IS IT POSSIBLE TO SWITCH ON MANUAL MODES WHILE THE DRONE IS COMPLETE IT MISSION FOR LANDING. TO AVOID CRASHING,
THE T ELEMENTARY (GPS) WAS NOT ON OPEN SPACE, IT CALCULATED THE POSITION NOT THE PREVIOUS TAKE OFF POSITION IN RADIUS OF 2.5M . DURING AUTO FLIGHT.
YOUR ASSISTANCE WOULD BE GREATLY APPRECIATED AN ASSISTANCE,