great! Do you have a logic analyser like the Saleae? If so please get a capture of the signal pin traffic so we can look at it.
Also note that on the Pixhawk1 you need to set RC_OPTIONS=8 to avoid an issue caused by the level shifters on the UARTs. I don’t know if the MicroPix has the same level shifters.
My friend have similar device with 2 inputs… i think is more than enough. But i think i can do this during weekend.
R9Slim+ MicroPix
Channel 1 to 15 tested OK, channel 16 no signal
Channel 5 to 16 are only observed in GSC because i don’t have nothing attached there. For 1to4 commands look good.
RSSI remember last seen value when connection between FC and RX is disconnected
RSSI remember last seen value when connection between RX and Taranis is disconnected
I cannot manage to start telemetry, even with standard S-Port/S-Port Pass protocols, tested with and without craft and theory level shiftier - inverter
can you send me your full parameter list so I can check it?
As I mentioned r9slim plus have inverted SPort pin is inverted FPort pin with FPort firmware.
Did you have chance to try it?
All parameters is default except:
SERIAL1_PROTCOL=23
SERIAL1_OPTIONS=7
RC_OPTIONS=8
RSSI_TYPE=3
i just re-upload latest version, RSSI now is proper 100=100 98=98…
on the pixhawk1 and R9 with plane 4.0 i have working s-port, the s-port pass not works
The same controller MicroPix with XSR With Inverted Hack
channel 1 to 16 OK
RSSI reading is multiplied by 2 RSSI 100db is read as 200
RSSI freeze in last read value if no connection to Taranis or FC is not connected to RX
Its look like different models of receivers give different value for RSSI
Still no telemetry
Tested R9 Slim+ with Pixhawk1
chancels 1 to 15 OK channel16 not work.
RSSI value is normal
RSSI freeze on last seen value
still no telemetry
I start to thing i am doing something wrong with wiring. the wiring is the same like Betaflight wiring only one cable for signal???
It seams R9 Slim+ is 15CH receiver, the behavior of CH16 is the same on the Betaflight. I observe this channel more detail, and find it stay on the max level 2006 value. When taranis is switched on, this channel go to max value and stay there no meter what input receive from the taranis.
The SERIAL1_OPTIONS should be 4, as the inversion options are not available on F4 boards.
Also, please set BRD_SER1_RTSCTS=0 to disable flow control on that port.
betaflight supports soft-serial for transmit, so it can do inversion on F4. With ArduPilot on an F4 you need to have an external inversion cable. Do you have an external inversion cable, and if so, which one and how is it connected?
For R9Slim+ inversion is not needed
For XSR i test with “XSR inversion hack”, and “craft and theory” cable inverter. in both case commands is received but no telemetry.
About SERIAL1_OPTIONS is more sens for me to be 3 half-duplex for one wire connection. however i test them all.
About wiring i mainly test R9Slim+ RX pin connected to TX pin on Pixhawk. (this wiring work good on my betaflight Omnibus F4)
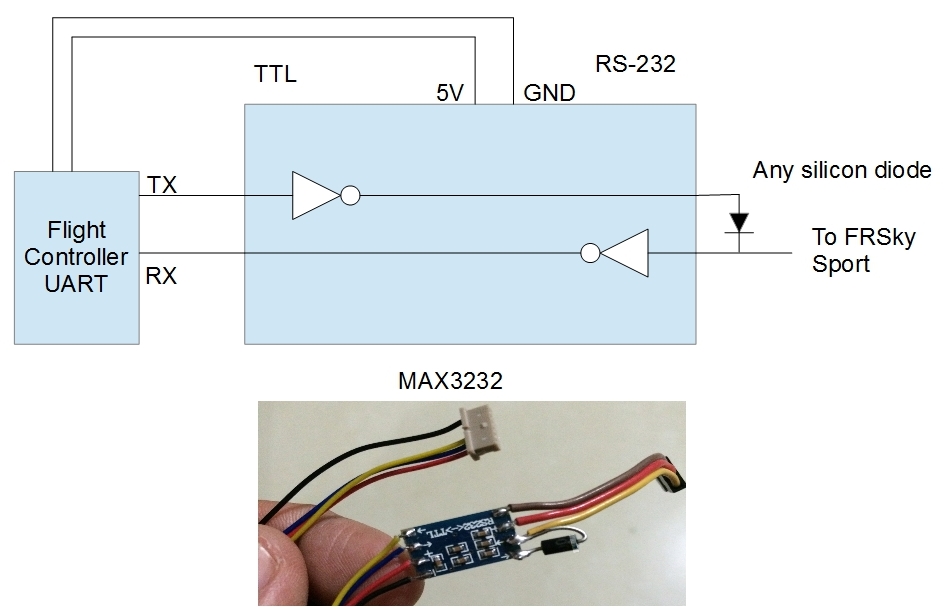
also i try to connect RX and TX ping, i swap the cables, i test with diode between RX and TX pins. I test schematic shown on the link down. But no telemetry only signals from taranis to FC.
for example you can see my betaflight working settings
set serialrx_provider = FPORT
set serialrx_inverted = OFF
set serialrx_halfduplex = ON
Hello!
Could you please provide correct settings for Matek F405 Std board(pin and port settings) ?
Now I’m successfully have control over the Fport but not telemetry (none sensors are discovered)
Thanks!
Also I’m using inverted pin for Fport so, no hardware inverter required
So for some reason when using Fport on copter I’m getting garbled telemetry data back to my radio… It doesn’t happen with my wing that’s using SmartPort & SBUS. I do get telemetry back, but it’s often way behind (yaapu script decides to say motors armed like 20 seconds after I arm them) and the “messages” part of the widget is missing characters & stuff. Fport Input seems to be working as expected, no problem there. RSSI is good and it doesn’t seem to be related to antenna mounting or anything as even with a direct line of sight to the antenna it’s still garbled…
I have it hooked up to my R-XSR’s “non-inverted S.Port” pad with no additional hardware between. Again, it does work, it’s just garbled. I also tried pulling off my ground station telemetry radio and I have no video transmitter. No idea what could be going on other than a potential software bug…
Blockquote
I do get telemetry back, but it’s often way behind (yaapu script decides to say motors armed like 20 seconds after I arm them
Hello i observe similar behavior on R series of receivers, R9 and R9Slim+. But this is not connected with Fport, i think there the speed is too high and overflow taranis buffer. Even without attached FC to R9/R9Slim+, taranis still receive telemetry (RSSI) couple of seconds after power down the receiver. This behavior not persist on X series receivers.
Hi @tiana @tenten8401
yes, the telemetry scheduler in current master is not properly initialized when invoked by the fport code.
Can you check if this branch fixes your issues please?
good catch, thanks Alex, I’ll bring this into master
@tridge
Could you please share config for Matek F405 - STD and R9mm.
I have control working well but no telemetry at all.
Thanks!
Hello thanks for fPort support, I really waited for this.
I got RC control working on an MatekF405-CTR and an r9mm receiver.
A small issue:
the fPort RSSI shows only 34 while sBus ch16 RSSI shows 100 with the same hardware and rx\tx right next to each other
Is this a scaling problem maybe ?
And another big issue:
I can’t get trottle failsafe working.
The values of all channels just stay the same when I turn off my radio.
I even disconnected the signal wire from the receiver to make shure there is no issue with the r9mm. Channels still stay the same.
GC failsafe is working correctly so I think it’s an problem with fPort.
Please help me, I think I got something wrong but can’t find it.
I even reflashed and defaulted everything from radio/R9 module/receiver/autopilot.
this fix is in master now
2 Likes
Well, after some manipulations with port settings I have r9mm telemetry running with FPort and Matek STD board and fresh master firmware
But I have only 3 sensors discovered
RxBt, RSSI and GPS
It seems incorrect because yaapu scrip is not working. Could you please recommend how have more sensors?
I have this working on the bench with a Holybro Durandal and an R-XSR receiver running the ACCST FPort firmware. Yaapu’s Lua script on Jumper T16 is working well with this set up too.
As per your directions I’m using:
SERIAL2_PROTOCOL=23
SERIAL2_OPTIONS=7
RC_OPTIONS=0
RSSI_TYPE=3
Thanks for more great work!
2 Likes