Let me ask some assistance of community
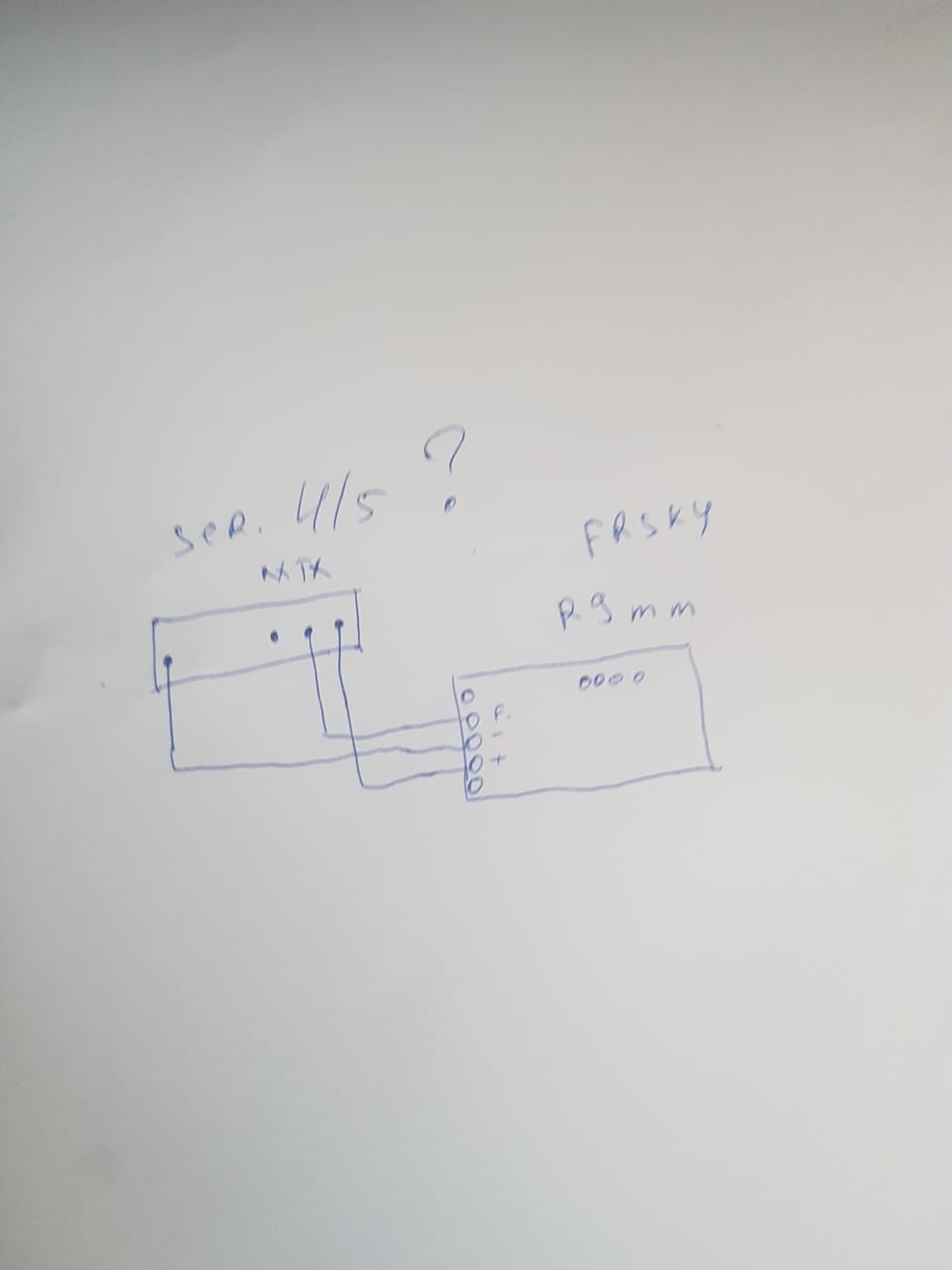
I have matek f405 std connected to r9mm: inverted fport connected to tx3 pin of fc
The settings are:
Latest build from master
SERIAL1_protocol = rcin
SERIAL1_options = 4 (or 164) doesn’t matter
Other options have no effect
As results I have rc control working
But in telemerty sensors of taranis I have only 3 them: two standard + gps.
Gps shows correct value.
How is it possible to have all sensors working?
Regards,
Changing brd_alt_config doesn’t have effect
Changing rc_option to everything except 0 makes nor control nor telemetry working
Having stable build not master makes telemetry not working at all
I can confirm FPort is working with Matek F405-CTR using a FrSky XSR receiver modified for non-inverted FPort as at https://www.flitetest.com/articles/frsky-xsr-fport-modificationss, with the non-inverted fport (formerly CPPM) pin connected to TX4 on the F405-CTR using the following config:
Just moved my omnibus F4 Pro over to f.port with R9MM. Control AND telemetry work (with Yaapu).
Version: Plane latest (b6ef76a1 2020-01-12-00:01)
Board: Omnibus F4 Pro V2
Receiver: FrSky R9 MM (Connected through the “inverted s.port” labeled pin (which is uninverted))
Transmitter: Jumper T16 Pro with R9M 2018 edition
Serial Port 1 (powered through the 4 pin plug)
I have tested it on Matek F765 with R9Slim+. RC is working fine but Telemetry is not working at all. Tried various settings but no luck. Telemetry works fine in INav with same wiring. Need help please.
All,
I would want to contribute and test F.Port, but I can do only as a bench test / function test, not flying yet with my build.
I am on Pixhawk4 - Copter 4.0.1-rc3 - Frsky RXSR ACCESS/EU - Taranis X9dSE2019, Hexa-X based on DJI F550.
With a fully functional S.bus, and S.port and Frsky passtrough Telemetry fully functional on Serial-4 and Yaapu9 on my Taranis.
I can flash my RXSR to ACCESS F.port, and give it a try, but I am not familiar with the process how to get the specific compiled code into my build. Or is it already embedded in 4.0.1-rc3 - Pixhawk4 ?
I can confirm the following working (RC and Telemetry using Yaapu9 Lua on Taranis) :
Pixhawk4 + Frsky RXSR (ACCESS - F.port firmware)
The RXSR is straight wired from S.port pin to Tx on Serial4 (no juggling around with non-inversion pins on receiver). SerialX_OPTIONS=7 does the trick here.
I still have the problem that Telemetry does not recover after RSSI reaching low value (not determined the threshold yet). When signal strength recovered, only the receiver based telemetry (RSSI and RxBT) are coming back up. This was also the case in S.Bus + Frsky passtrhough, not related to this F.port implementation.