Hello all! I’m a first time builder, but have flown a few commercially built drones in the past. I have followed several how-tos and videos on building one from scratch and thought I had everything spec’d properly for a custom drone:
- 10x4.5 props
- A2212 - 1400kV motors
- DT30A ESCs
- Pixhawk 2.4.8 (Yeah, I know NOW that it’s a cheap Chinese clone and will be replaced by a legit Cube
- Flysky FS-i6X controller
- ia10B receiver
- Ublox M8N GPS
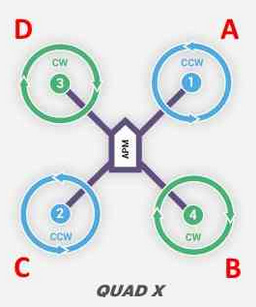
I gone through all the steps to flash, calibrate everything, etc. I did the ESC calibration a few times, just to be sure things were working as they should. It’s an X-frame, and motors ARE spinning in the proper directions.
The problem I’m seeing is everything arms as it should, but when applying a gentle throttle up, the front to arms DO throttle up, but produce no lift while the two rear arms do lift (essentially lifting the rear, but not the front). I’ve confirmed I have the right angle props on the proper motors, and all 4 ARE spinning in their proper direction. There is only a very slight weight imbalance in the front of midline, but literally about 2oz. difference when put on a scale.
The frame was custom 3D printed using PETG based on the design of the F450 HJ450 DJI frame. All assembled, the entire copter weighs in at 3lb 10oz.
Any suggestions on where I should look for either issues or solutions?
Thanks in advance!
Skippy