Don’t think it is much different than using Jekyll on Github Pages. I am happy with the current tech stack for docs. Just need to find best way to get community builds into system. If things have not changed much over the last decade for wiki’s then there should be 10% or less of community who actually commit info in some form. So not too worried about being overwhelmed by submissions, but also do not want to put hurdles into place that may block contributions either. I like the idea of having people put community builds into a google doc or similar format and then bring that into the devframe docs. Unless we get more than a say a dozen submission in year (which I doubt) I don’t think it will be an overwhelming task.
Edit: Whatever way we decide to go I could use help with best format/template for submission. Honestly I would be happy with a short youtube video overview of build and use case along with a parameter file as a minimum submission.
Sure. For Jekyll is it just using some sort of Markdown template? My static blog doesn’t use Jekyll but has a simple format which is probably similar. If you could stub one of those out with some dummy text I think it would be easy for people to follow the format - then you wouldn’t need any conversion in the middle.
---
date: now
title: foo
tags: bar
---
# Markdown body goes here
Vel dolor rerum quasi dolore et dignissimos blanditiis. Debitis animi et omnis
doloribus dicta quia. Ipsa enim modi minima.
Jekyll is just a static site generator that uses liquid templates with support for markdown with yaml headers as you included above. While I think that would be OK for some not sure it works for community. I have found from hard experience that collaboration evaporates as soon as you ask non-stakeholders to use a different tool.
I am a week behind (per usual) but finally getting a chance to sit down and start on docs again. We have some time to figure out contributions workflow. I will seed the Community Builds section with one or two of my own builds so we will have a template in that regard. But it might take me a few more weeks to get to it.
Cool! Was going to ask if fastening both motor and the holder with a long M3 screw is a good idea but you already addressed that.
What’s the ballpark weight of a frame for 10" props? I have access to tubes and a printer and might try this out.
Good question. 256 grams is weight of 450 base frame I built for docs. That’s without motor, sensor or GPS mounts. Since frame weight was not one of the key design criteria I don’t pay too much attention when I probably should at least document. Since we are using 3D printed plastic and a bunch of #6 screws it does not scale down that well. Gets a bit chunky for anything below ~300 class w/ 5in props IMO. Upper size restriction has more to do with 12mm arm tube diameter. And we felt that anything above ~10in props was not really in scope for basic open source development.
To start off I have been using the APM board since 2015 and have built few drones in the past. With the devFrame I want to create a fully autonomous drone but my goal is to make it a swarm project with devFrame. Right now I have extra Turingy NTM Prop Drive motors lying around and, Multistar 40 AMP ESC that I can use.
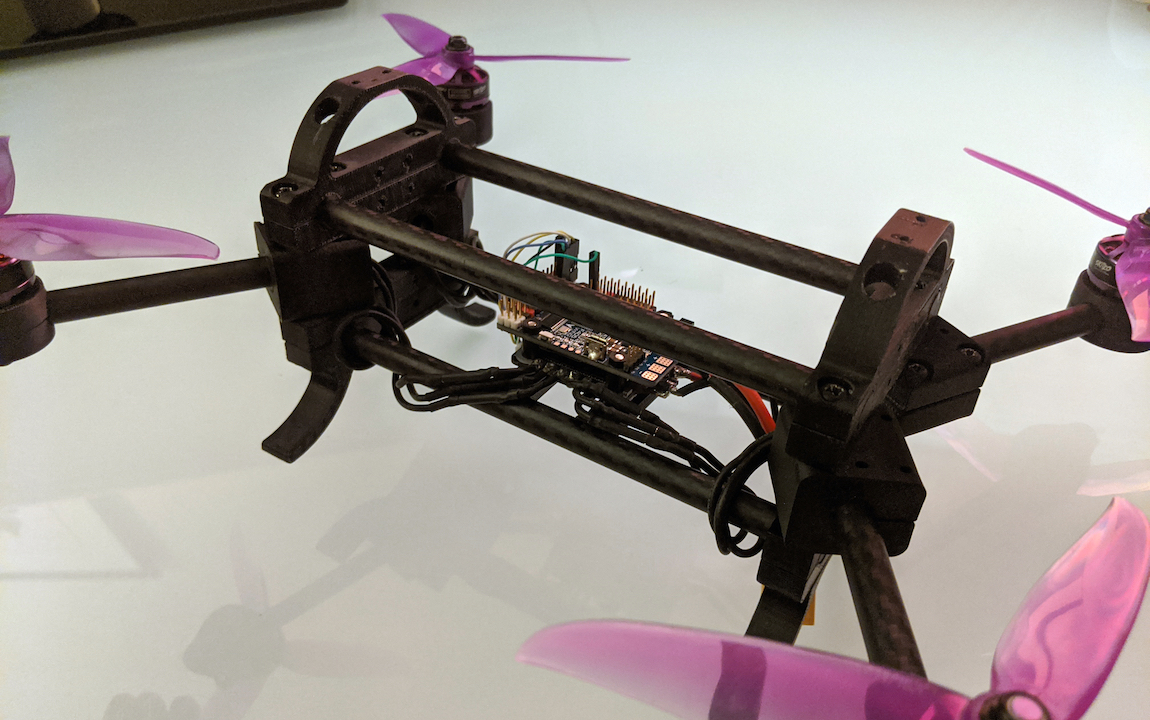
Motors should be here Friday. I’m trying to figure out how / where to mount my FL a Matek 405. Printing out a few of the boards in the accessories folder to play with.
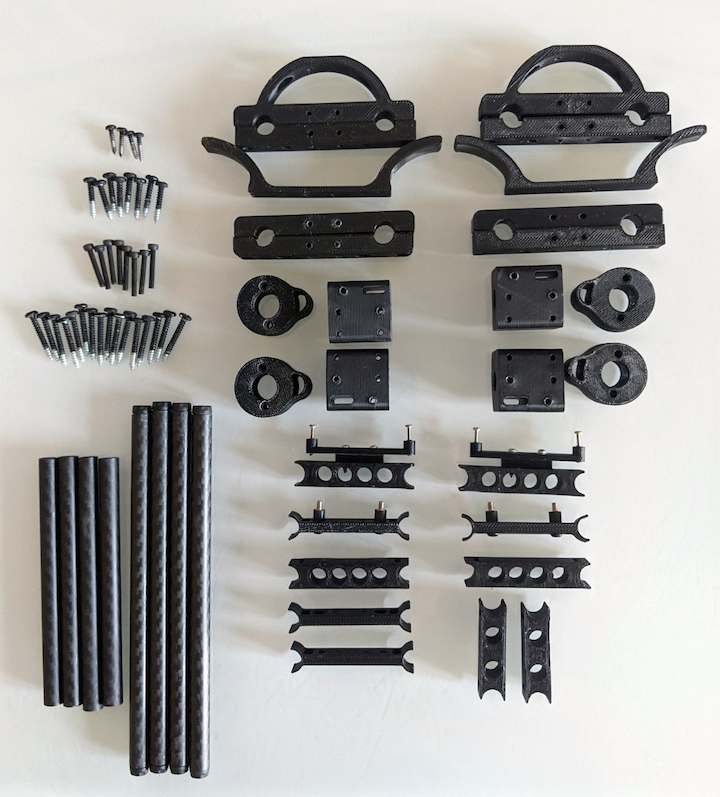
Really excited to see more than me and @fnoop give this a shot. Looks really good. Frame tube end caps a nice touch. Are those printed? I guess I could spin up a design for TPU end caps.
RE mounting the Matek. Just space the cross mounts and use vibe isolation standoffs. The pilot holes on the top of the cross mounts will get you to 30mm spacing which is more than close enough to 30.5. The slots in the middle of the cross mounts were tweaked to provide enough clearance for a M3 nut to secure M3 standoff. Can be a bit of a pain but with needlenose there is just enough wrench clearance to pull it off.
Yeah - I found a chair leg cap on Thingiverse and scaled it down. Haven’t printed a lot of TPU so its a bit rough but it works
I thought about mounting FC between the full cross mounts but wanted to protect the underside a bit so I printed out the plate that fits in the cross mount with the slot. Now I’m modifying that to make it double or maybe longer so I can mount my FC and transmitter next to each other. Don’t think it’ll flex enough to matter.
All excellent data. The cross mounts with platform were a design cycle that I ended up keeping as an option. I liked it for my 300 but keep going back to regular cross mounts for bigger stuff since the longitudinal spacing options are infinite. More docs coming today. Finally.
Motors came in yesterday so today I’m planning on wiring everything up.
Question: How best to level motors to frame? Since we’re mounting these on a round tube… I’m thinking I’ll get it on a level surface - then install props and visually check those with a level.
I just eyeball them. Try to make motor can line up vertically with a vertical edge or two on the end clamps. So yes, pretty visual. You could just lay it all out flat on table top with arm tube clamp installed, but eventually you will twist a motor. I have found it pretty quick and easy just to sight down motor can.
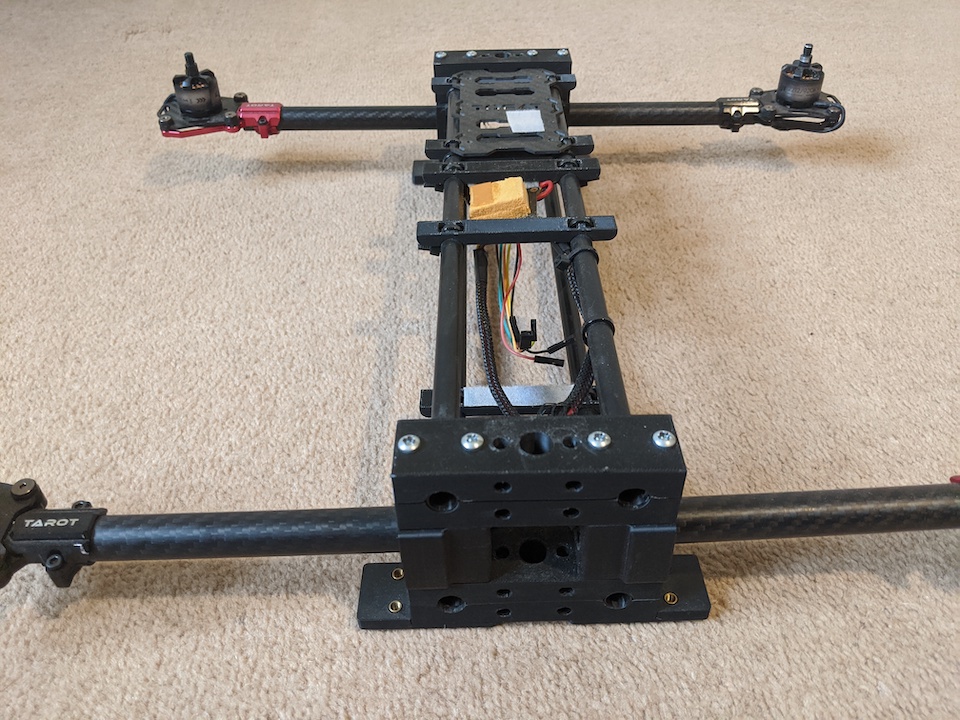
Weight of base frame, ESC+FC, plus motors/props: 430g
ESC is 4in1 Typhoon32 (Blheli32)
FC is Matek 405-Wing. The -Wing model is used because it has lots of UARTs and also huge BECs that can easily run as many sensors/boards as you can physically fit.
Did first flight Sunday. Overall it flew great! Need to print some wider legs - I fly in an old farmers field and the ground is very irregular. Other than flying it into a tree at the end of the day it was all good. No damage from the tree hit BTW.
Next weekend I’ll do some autotune and get some logs. Also want to update my stack to Crossfire for more range.