Received…putting in our drones to test.

Anyone able to flash this with copter.
I see its pre flashed with plane.
Download the .apj file from the repository and load it with the “load custom firmware” option in MP.
Here
1 Like
As always Dave your simply awesome.
cheers
Following your experience rick😃
Well so far it’s been nice to set up.
I like it
1 Like
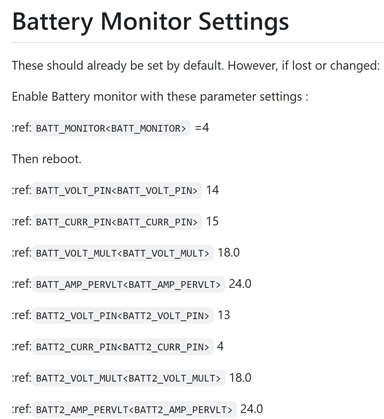
What configuration should I put for the PMU?
I am using a LIPO 4S 7000mAh 65C, 14.8 V 103.6 Wh
Hi there,
I suppose I’m a bit late, but I’d thought I’d try.
If you give me the opportunity for one of these flight controllers, I’d love to finally build a octocopter. I’ve got a frame in the box brand new, and pretty much all the components but I’m waiting for a suitable flight controller, and yours looks perfect.
I’ve made a handful of quadcopters before, a VTOL, and 3 hexacopters. I’ve always been scared to make an octocopter, but maybe this’ll give the confidence to do so.
I’d like to share this opportunity with my friends. They’ve built an FPV drone before and they’re interested in larger drones, but they’re no confident of doing so. This in a larger drone wi definitely convince them and so I think I’ll be able to spread the drone building fervour to them.
Thanks!
Sorry, the first phase of the sponsorship is over, I will invite you again for the second phase.
Can we get an estimate as to when that’ll be?
Per the Hwdef, the defaults. Just update the battery capacity:
There is no definite time, I estimate within 2023.
1 Like

I have received the package today. It arrived with very good packing. The controller is so robust and love it. This will go into copter.
Will send the feedback once built it.
1 Like
It has been a little longer than I thought but I have finally gotten somewhere on this rover. The base build is complete and now its just time to tune it and add more fun stuff!!! I am waiting for the mounts for the GRTK gps from blicube they should be finished tonight then time to set that up and to test the new autotune function for rover.
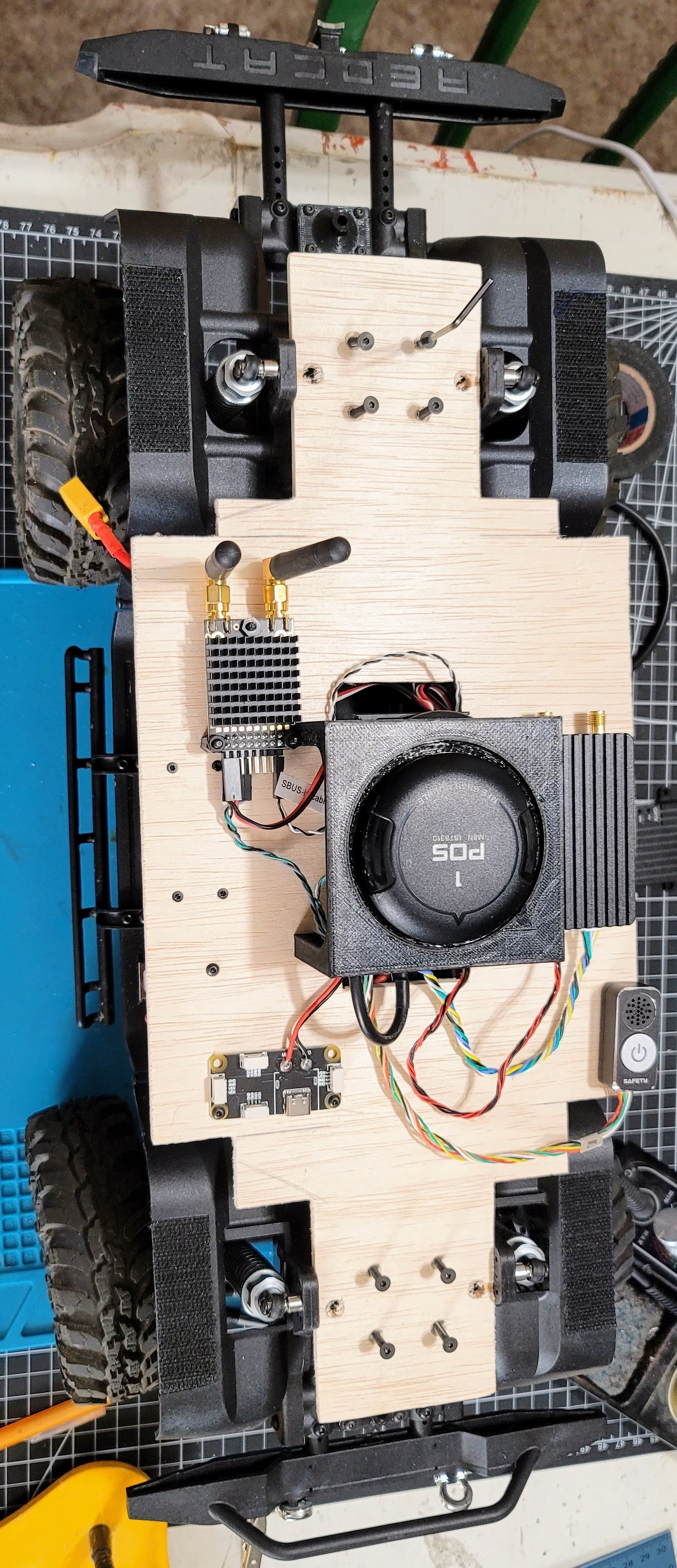
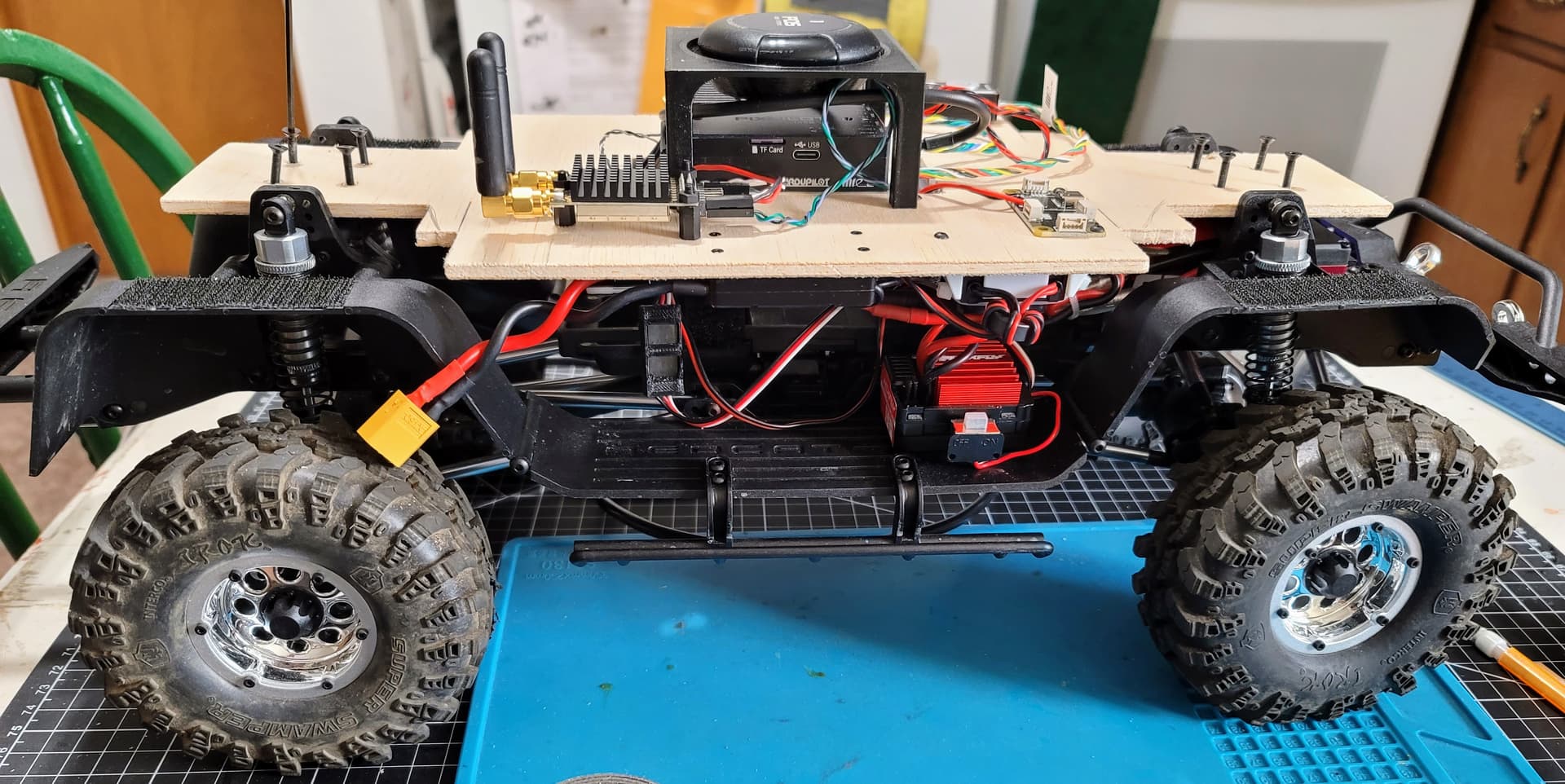
Installing a digital transmission antenna will keep it away from the compass on the GPS.
The car looks great overall.
안녕하세요.
저는 안타깝게도 받지 못 했습니다.
세관 문제로 반품 돼 벼렸습니다.
2단계 후원에 참여 해 주세요.
I’m trying to connect the PixPilot V3 to a crossfire receiver, following the directions listed here makeflyeasy PixPilot-V3 — Copter documentation I connected the crossfire receiver to GPS2/UART8/SERIAL4.
When I start the FC, connected to the receiver, I get a connection to the radio, but ArduPilot throws the error message:
CRSFv2 running on Non-DMA serial port.
Is the instruction correct? Should I be connecting crossfire to Telem 1/SERIAL 1 or Telemetry 2/SERIAL 2 instead? These ports are both listed as having DMA.
Hello timtuxworth,
Check that RC_PROTOCOLS is 9.
Bye,
Raúl
9 is SBUS I am using Crossfire.
[Currently it’s set to 1 = All anyway]