We are trying to get coaxcopter settings to work on our drone, but only the helicopter frame class works. Is there anything that we might be doing incorrectly? Video link is below.
What type of coax copter? Forget the video, post the parameter file. Looks like you don’t have Octoquad/X8 configured. Assuming that’s the frame class (4) you have.
I think you’ve loaded “-heli” firmware where it is likely unnecessary. Use the base firmware or the one labeled “-bdshot” if you have BlHeli ESCs.
Would be monumentally helpful if you were more specific with your question, exact physical configuration, and included a log and/or parameter file.
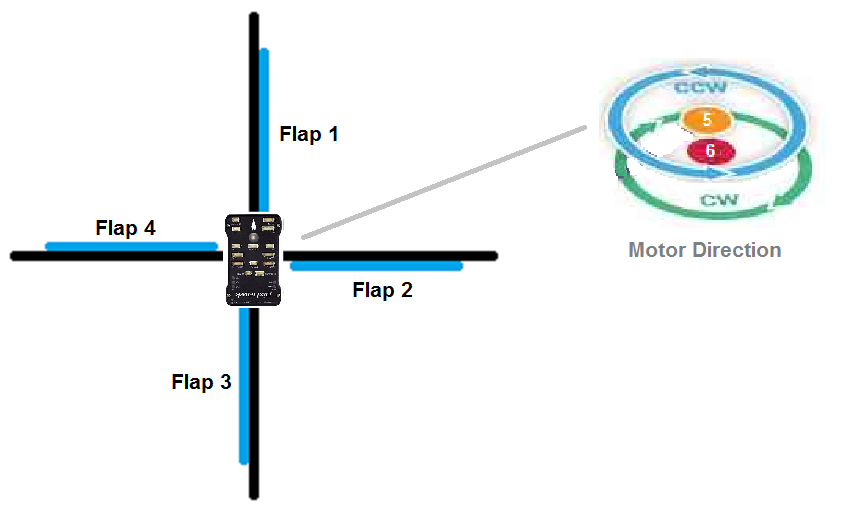
Hi, so I am also having a similar issue. I am very new to ardupilot and I am trying to get a CoaxRotor to work. I might’ve installed the heli option when initially installing my firmware, but to my understanding that should work as it is still the same copter version 4.4.3. Whenever I change the parameter frame_class to 9, as specified in the CoaxRotor page, I no longer get any output to in my servos, even though motor 5 and 6 as stated on the documentation. for my physical configuration I am using something very similar to what is presented in this diagram to the documentation.
Any help would be appreciated!
I have also attached my parameters
param_list.param (18.4 KB)
Hi, how would I go about installing the base firmware by itself? as I said I am very new and I only see these options in my mission planner software. For more details about my specific situation please see my other comment in this post. Please let me know if anything else would be useful.
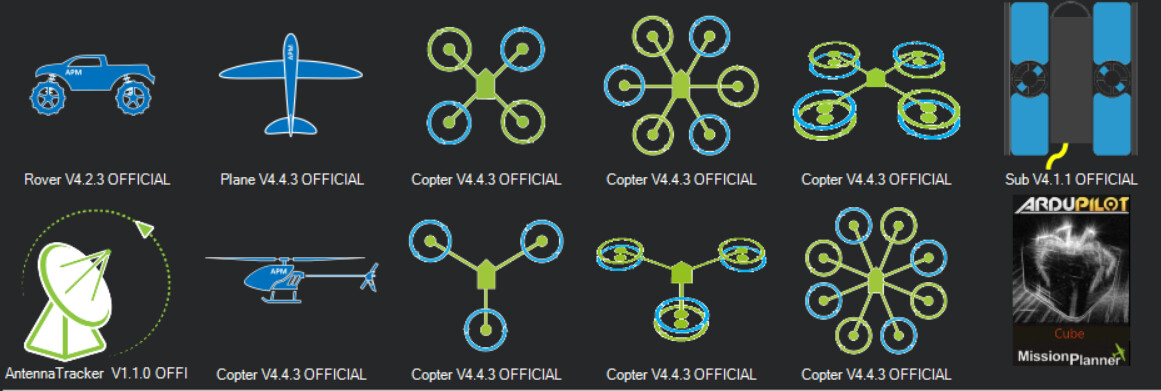
You click on the one that looks like a quadcopter, not the one that looks like a helicopter. The “-heli” firmware differs quite a bit and isn’t likely what you want to install based on your sparse details.
1 Like
Indeed that parameter file reflects a Traditional Heli flash. As @Yuri_Rage said it’s not what you want.
1 Like
Hi @dkemxr, I went ahead and flashed my cube again with quad firmware. I was going through the first time setup guide and I am a the point where I am setting the servo outputs. I set the outputs on channels 1, 2, 3 and 4 to be motor 1, 2, 5 and 6 respectively given the diagram that I have shown previously. I have disabled the arming checks given that I am currently testing in a prototype that does not have a propeller attached. Still, when I look into the servo outputs, I can’t seem to get a signal or output in my servos even though I am getting proper signal in the radio calibration screen. Any idea what might be the issue here? I have uploaded my updated params here:
param_list.param (17.3 KB)
You know most threads about Single or Coaxcopter are about them not working. Or if they do they don’t get off the ground. And if they do get off the ground they have no pitch or roll authority.
Try using Mission Planners Motor Test and see if the servo’s move then. In the simulator there are outputs shown form this.
I built and flew some coax and singlecopters, but not with ardupilot. Those copter types seem a bit like the unwanted stepchild of arducopter…
param.param (17.3 KB)
This is my parameter file. I am not receiving any output from moving my transmitter joysticks, but if I change servo functions to RCIN, they work properly. However, changing them to motor 1,2,3,… does not receive a response from the transmitter.
param.param (17.3 KB)
I used a frame class (9) for coaxcopter.
When I configure a flight controller on the bench with 9 as the frame class and 6 outputs as motors the outputs change on the Servo Output Screen when using Motor Test. Did you try this?
What did you end up using then?
Yes I did, I do not see the outputs change at all.
Use search here on the forum for “coaxcopter” and select the top pick. Download one of the .bin flight logs in the post and troubleshoot your configuration using it. Or perhaps post in that thread and someone may reply that has actually got one of these things to fly.
I see this from time to time are you armed? try rebooting as well they will show.
You don’t have to be armed to run the Motor Test.
Yes I know.-----------
I was addressing this below:
" when I look into the servo outputs, I can’t seem to get a signal or output in my servos even though I am getting proper signal in the radio calibration screen"
Testing 1st with Mission Planners Motor Test is what you would do initially to determine if it’s a configuration problem. If it doesn’t work there, and he says it does not, then it is. You don’t even need an RC receiver connected to do this. So whether there are inputs shown in the radio calibration screen or if it’s armed is irrelevant at this point.