I have built an FPV drone using 7-inch propellers.
The motor-to-motor distance is 380mm, which is slightly larger than typical 7-inch FPV drones.
With the payload attached, the total weight is approximately 1kg (excluding the battery).
The frame is designed with 7mm arms and 3mm plates.
The arms are firmly secured and show no signs of flex or twist.
The flight controller is a custom DIY board based on the F405, and its stability has been thoroughly validated through testing.
The motor wires are connected to the ESCs with some slack to allow for movement, and the FC is mounted using soft dampers to reduce vibrations.
From a hardware standpoint, everything seems to be well set up.
I conducted a short flight test lasting about one minute.
Initially, I performed several throttle sweeps to raise and lower altitude.
Then I moved on to aggressive pitch, roll, and yaw inputs for a braking test.
After the flight, the motors were warm but not excessively hot — I could still touch them without discomfort. I estimate the temperature was around 40°C.
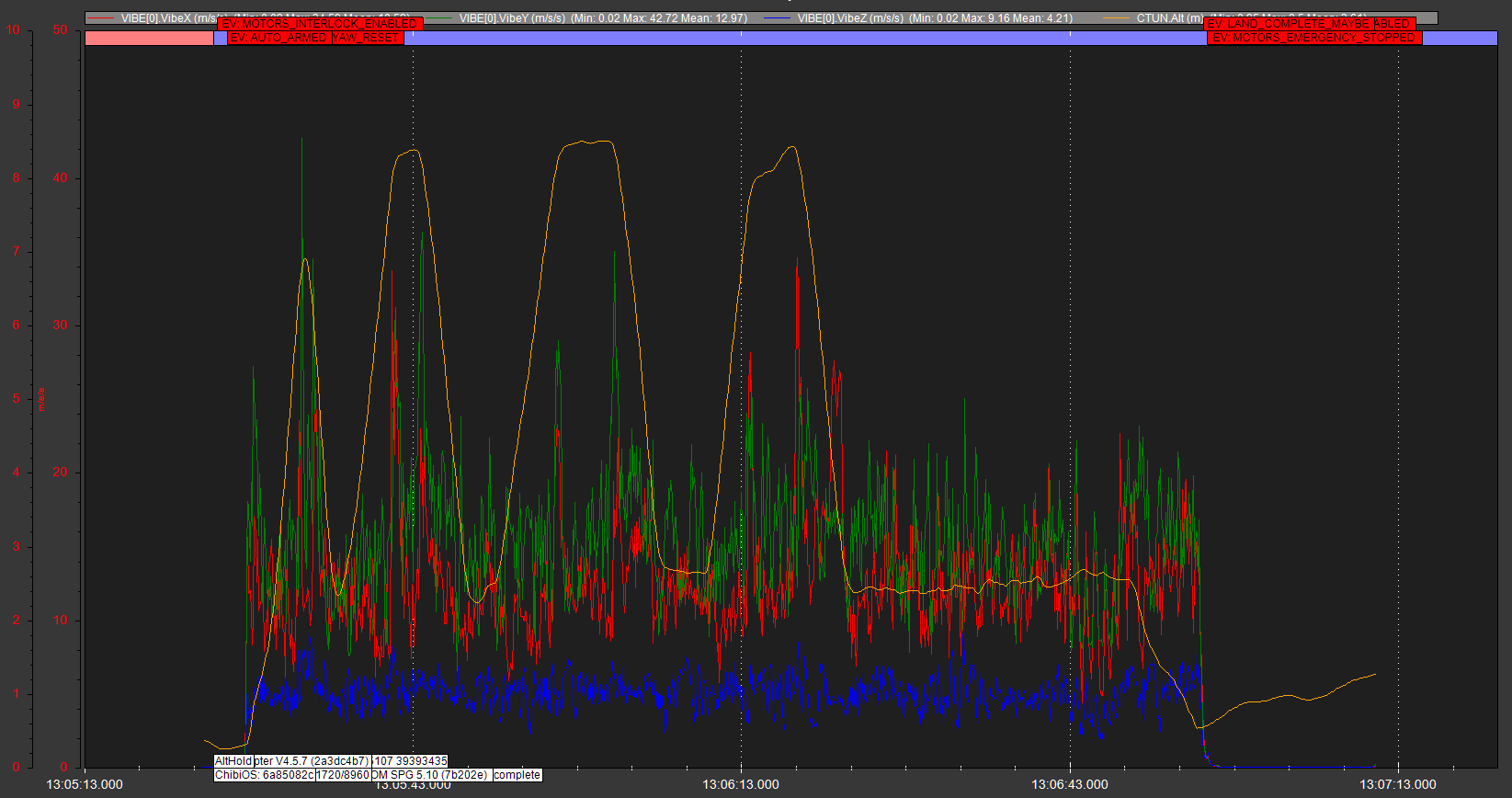
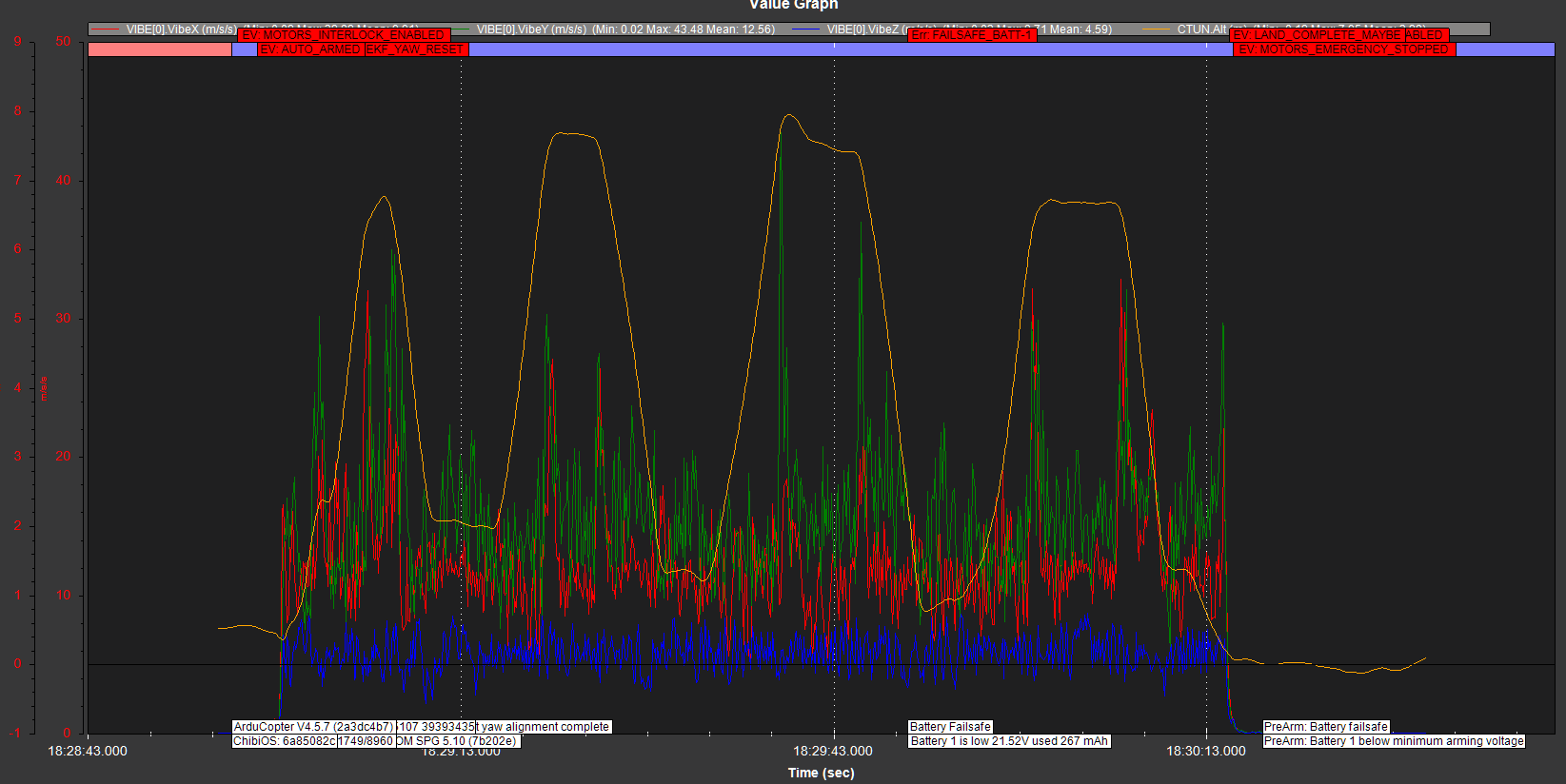
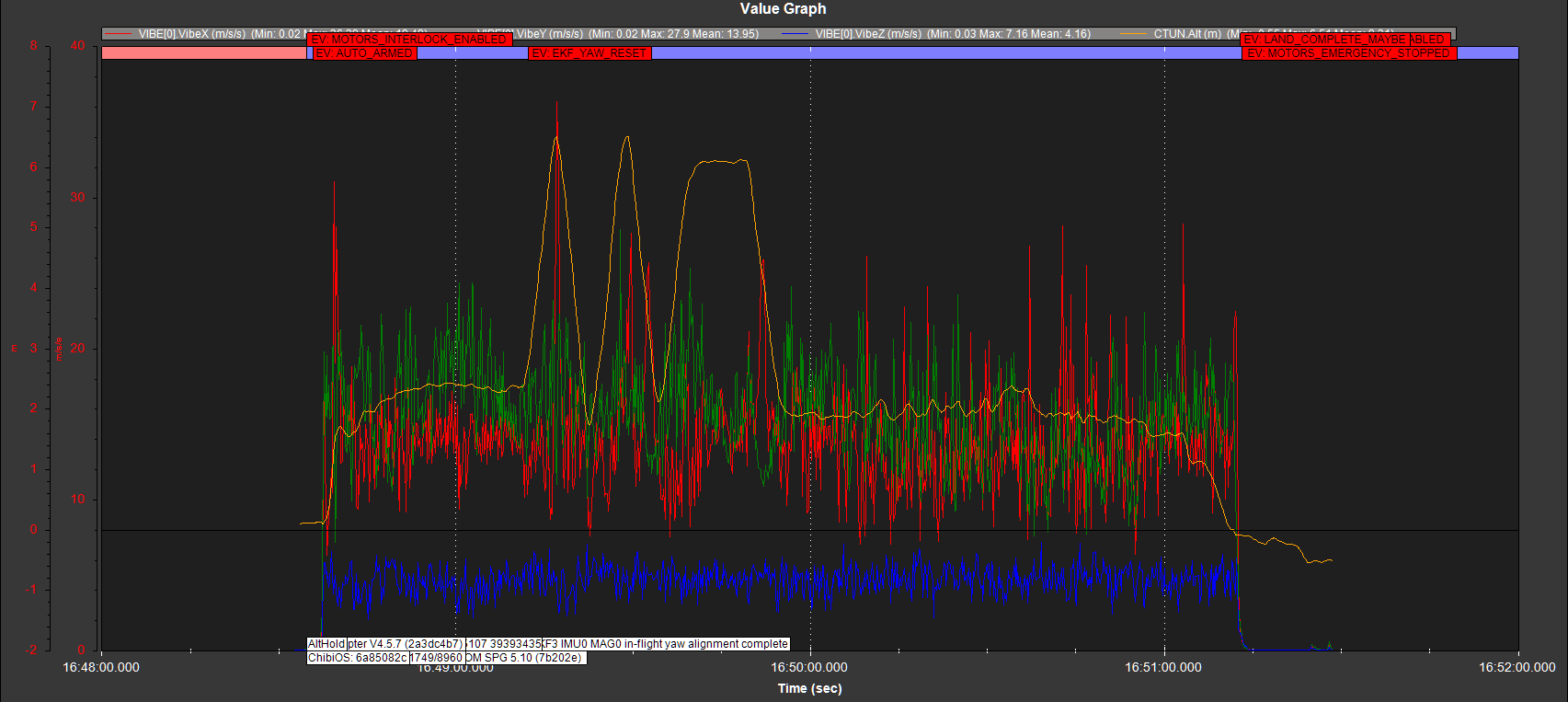
Upon reviewing the flight logs, I noticed that most vibration levels remain below 20, which appears acceptable.
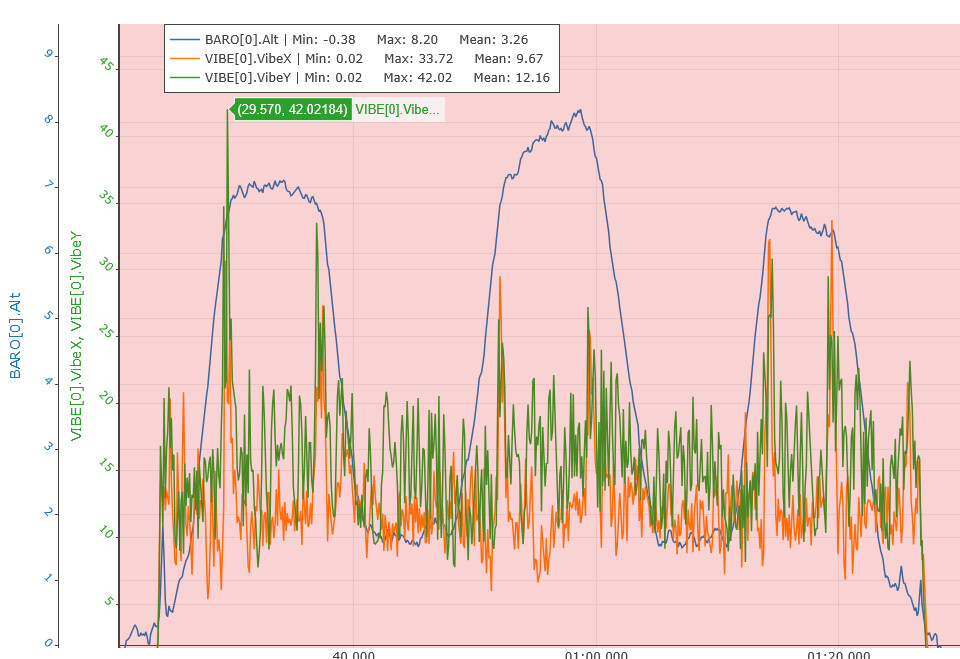
However, I observed significant vibrations specifically during throttle changes, particularly when the altitude is changing.
I suspect this could be due to prop wash — though I am open to other explanations.
I have tried increasing the MOT_SPIN_MIN value, but it did not seem to make a difference.
I also slightly reduced the ATC_RAT_P values for roll and pitch, but that did not help either.
I would greatly appreciate any suggestions on what else I could try to reduce the vibrations during throttle transitions.
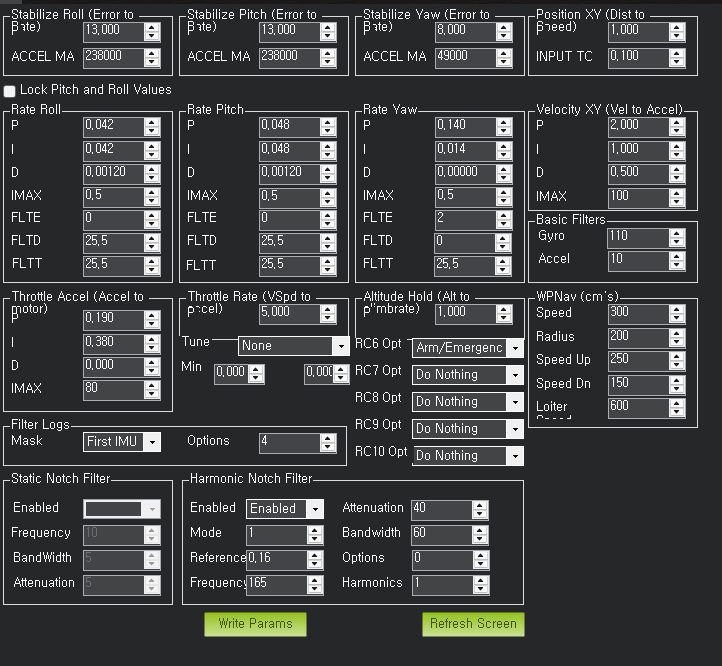
Your throttle based harmonic notches are not configured correctly, most work is done by INS_GYRO_FILTER, that can cause propwash and instability on low RPM, also there is some resonance on 75hz, preferably move to RPM based harmonic notches or try something like
I’m seeing sharp spikes in vibration when the drone stops ascending or begins to descend.
This could possibly be related to the heavy payload, but considering that MOT_THST_HOVER is around 0.18, I don’t think that’s the root cause.
The values for PSC_ACCZ, PILOT_SPEED_UP, and PILOT_SPEED_DN are also not particularly high.
At this point, I’m becoming more and more confused.
Your filtering looks OK for me now, but your PIDs are way too low, it’s not effective if propwash. Please try with stock one, should be OK for 7", but anyway you need to redo autotune after filter change.
As you mentioned vibe happens on altitude increase, so it’s unlikely a propwash,
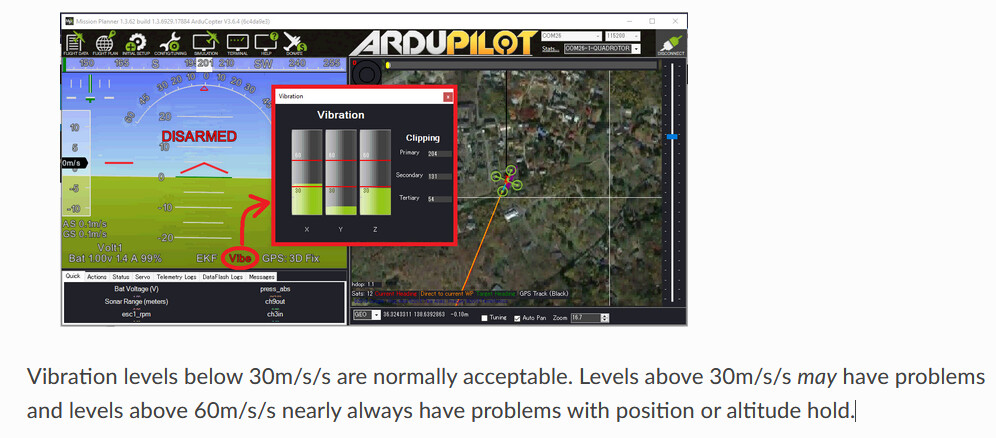
so it maybe just frame/props vibrations on state change. Vibe levels up to 30 are acceptable according to docs.
Over the past few days, I’ve continued test flights with my drone.
Unfortunately, the vibration levels have not improved.
My goal is to bring the hover VIBE down to around 10.
Why should the INS_GYRO_FILTER value be increased?
Previously, you suggested raising it from 57 to 110.
However, I understood that when vibration is high, this value should be lowered.
(I might be misunderstanding this)
My drone uses 7-inch propellers, but the frame is a 380mm class, which is relatively large for this prop size.
There is a payload mounted on top of the drone.
The arms are 14mm wide and 7mm high.
While the height of 7mm seems reasonable, I’m concerned the 14mm width might be insufficient.
Should I consider increasing the width of the arms?
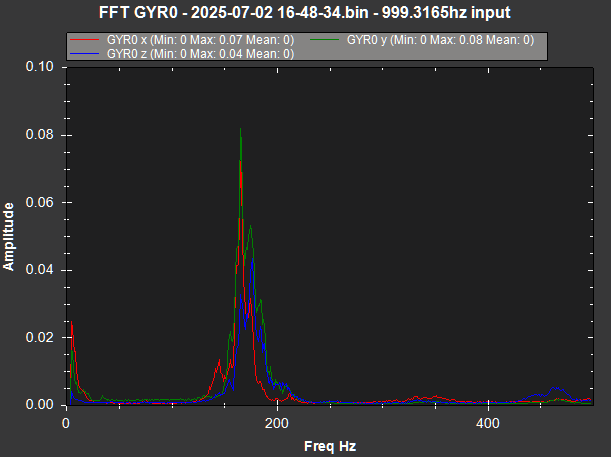
Despite applying a notch filter at 165 Hz, the FFT analysis still shows significant noise at that frequency.
Would it be worth trying to reduce the bandwidth to around 60?
You are using the wrong tool. Use the Filter Review Tool.
Delete the 2nd Notch it’s not needed. And certainly not 2 throttle based Notches. The Filter Review Tool Estimated Post Filter will show you that.
Set the Gyro Filter back to 57Hz. You may be able to increase it later. My 7" is at 150Hz but there is very low vibe/noise on the frame.
Don’t set the rate PID’s back to default., but you probably already figured out why that won’t work.
You should be using Dhot600 it’s generally the most stable. Why no ESC telemetry for RPM?What ESC’s do you have?
You have some overshoot in Pitch/Roll Attitude but another Auto Tune may sort that.
Thank you sincerely for your kind and helpful response.
I will remove the second notch filter as suggested.
I’ll also revert the gyro filter back to 57 and try using the filter review tool.
Unfortunately, the ESC I’m currently using does not support telemetry.
It’s a JHEMCU ESC, so I’m using the throttle-based notch filter instead.
I was using DShot300, but I’ll try switching to DShot600.
I had suspected that overshooting might be occurring, but I believed the current PID values were already low enough.
Given the current setup, do you think it would still be reasonable to reduce them further?
I’m manually setting the PID values because the results from autotune were not satisfactory.
Just want to mention that I’m ardupilot novice, so my knowledge is not always correct.
As I understand how vibrations level is calculated that is described here: Measuring Vibration — Copter documentation the values for vibrations calculating is taken as RAW gyro values - before any filtering, so I believe improving filtering DOES NOT lowers vibrations measurement.
My suggestion to take your INS_GYRO_FILTER higher is to fight propwash you mentioned before - the logic is to improve filter delay so it will be more time to compensate.
Anyway I don’t see any noise correlation with ascend/descend now, it’s just more or less consistent.
380mm is like 10" frame, there is a lot of good stiff frames of this size, but not only width and thickness plays a role here, how FC mounted, what carbon used, is it well built, etc.
it’s prop noise, that should be filtered by throttle based notch filtering, it’s preferably to use RPM filtering that gives much better results and are move foolproof, your ESC might support bidirectional dshot with bluejay, so having telemetry wire is optional, just go to https://esc-configurator.com/ and check if it’s possible to reflash.
If it’s BLHeli_S you can likely flash Bluejay firmware and then use Bdshot if that board supports it.
Overshoot is typically a sign of them being too low so in that regard @mike_tk is probably correct but default PID’s would almost certainly cause output oscillation on a 7" with the thrust/weight you have. Every craft is different but you could try .06 for the Rate Pitch/Roll P&I and .002 for D.
Remove the 2nd notch, configure for Dshot600 and run Auto Tune. Yes, the vibration levels are higher than desirable but not crazy high.
Am I correct in my assumption that VIBE values are calculated before filtering? So filtering does not directly lower the values but just lowering causes like oscillations that can provoke resonances ?
Go here and page down to where the algorithm for the Vibe data is detailed. Managing Vibration
Then go here and read about how the notch filter is applied and why. IMU Notch Filter
The take-away here is that the filter is applied to the Gyro data before the control loop.
At this point, I’m struggling to determine whether the issue lies in the hardware or the software.
I suspect that the arm width might be too narrow, but when I try twisting it by hand, it feels solid and well secured.
For now, I’ll focus on adjusting the filters.
If that doesn’t resolve the issue, I’ll start considering hardware improvements as well.
Before heading out for another flight, I have one more question.
I’ve understood that overshoot typically occurs when PID values are too high,
so I was planning to lower them further.
But could it be that the overshoot is actually being caused by values that are too low?
Yes. Do you know how to perform In Flight Tuning ? It’s a good way to zero in on a tight tune.
Start with Rate Roll/Pitch kP and a range of .04 to .12 And always check the RCout’s for oscillation as an indicator you went too high. If you don’t see a response to the change increase D and do it again. Yes, it can be time consuming.
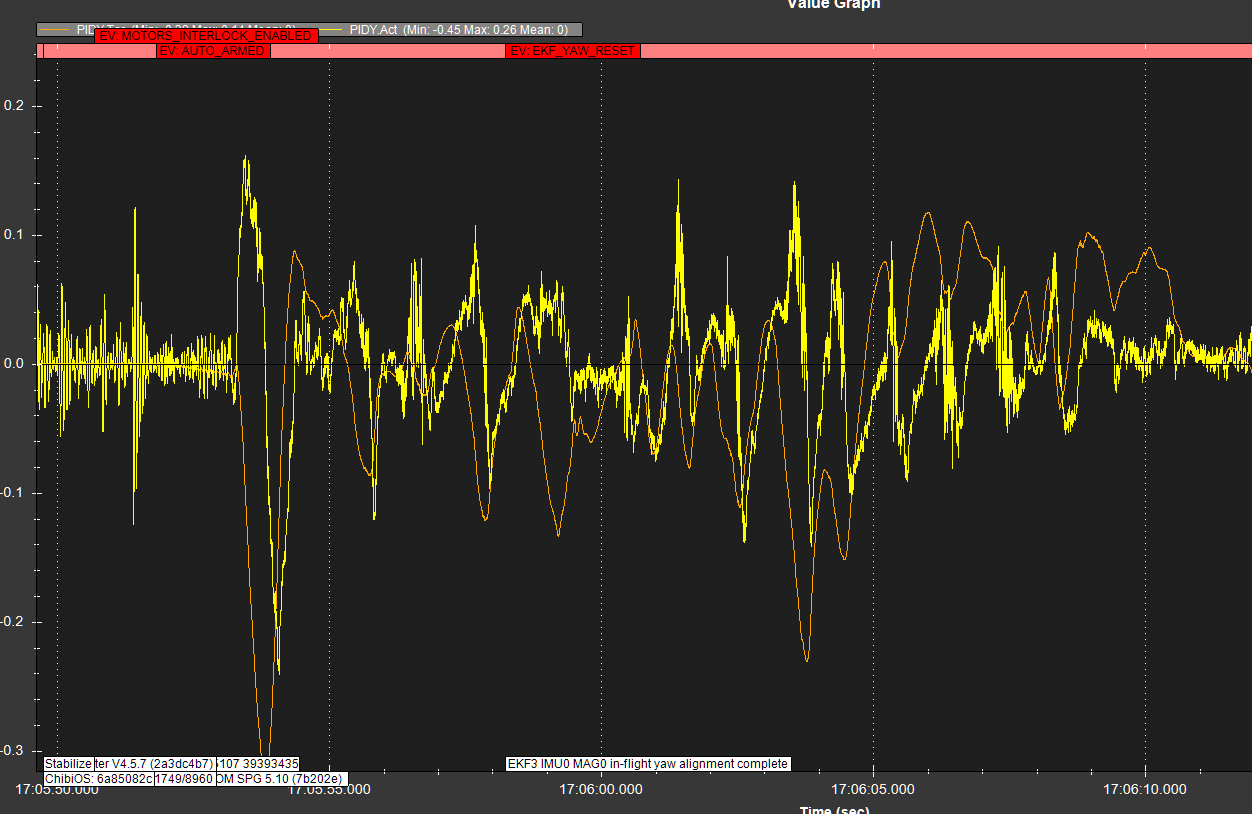
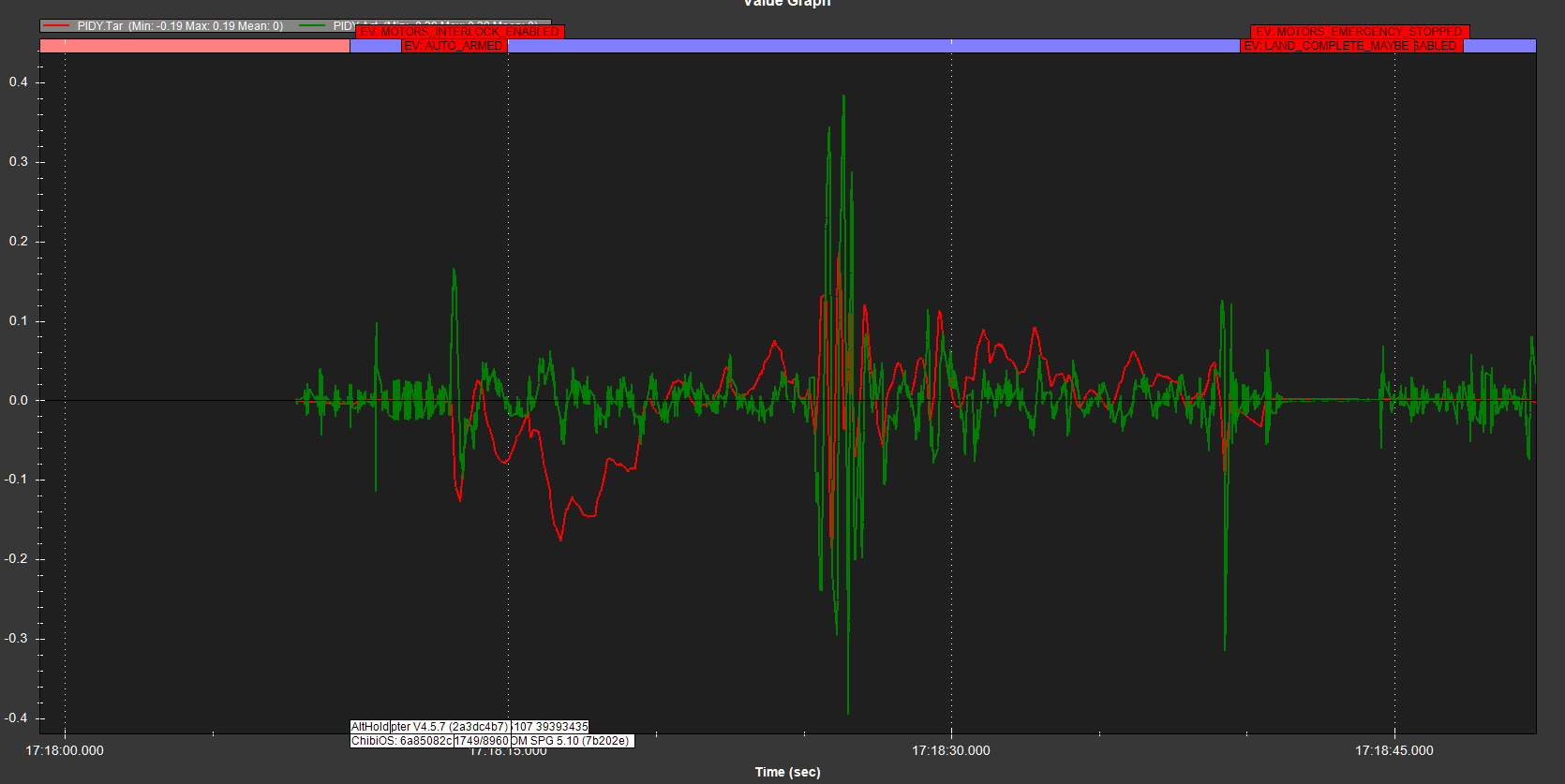
I know these PID settings are not ideal, but looking at the graphs of the Target (Tar) and Actual (ACT) values, I’m not sure if I should further increase the Yaw PID values.
The D value is currently at the default of 0,
but I’m thinking of trying a small increase, like 0.01 or 0.02.
I would really appreciate any advice you could give me.