At the time of the crash the copter is already in RTL mode from radio failsafe, and voltage drops significantly and current spikes from the normal 10 amps to over 100 amps
Pitch and roll were just starting to depart from desired at the same time as motor outputs were making small corrections, so there wasnt some sudden breakage. It gradually got worse over a very short time until attitude couldnt be maintained.
Motor 2 did give the most trouble - it’s output was commanded highest the most, but it was not a complete failure. So the prop wasnt immediately lost. Most likely the prop was completely lost because of the collision, and not the cause of the collision.
It’s most likely a collision with terrain - tree branches at about 124m altitude. After the collision the copter is at rest at about 106m altitude. It appears there is quite a slop to the terrain.
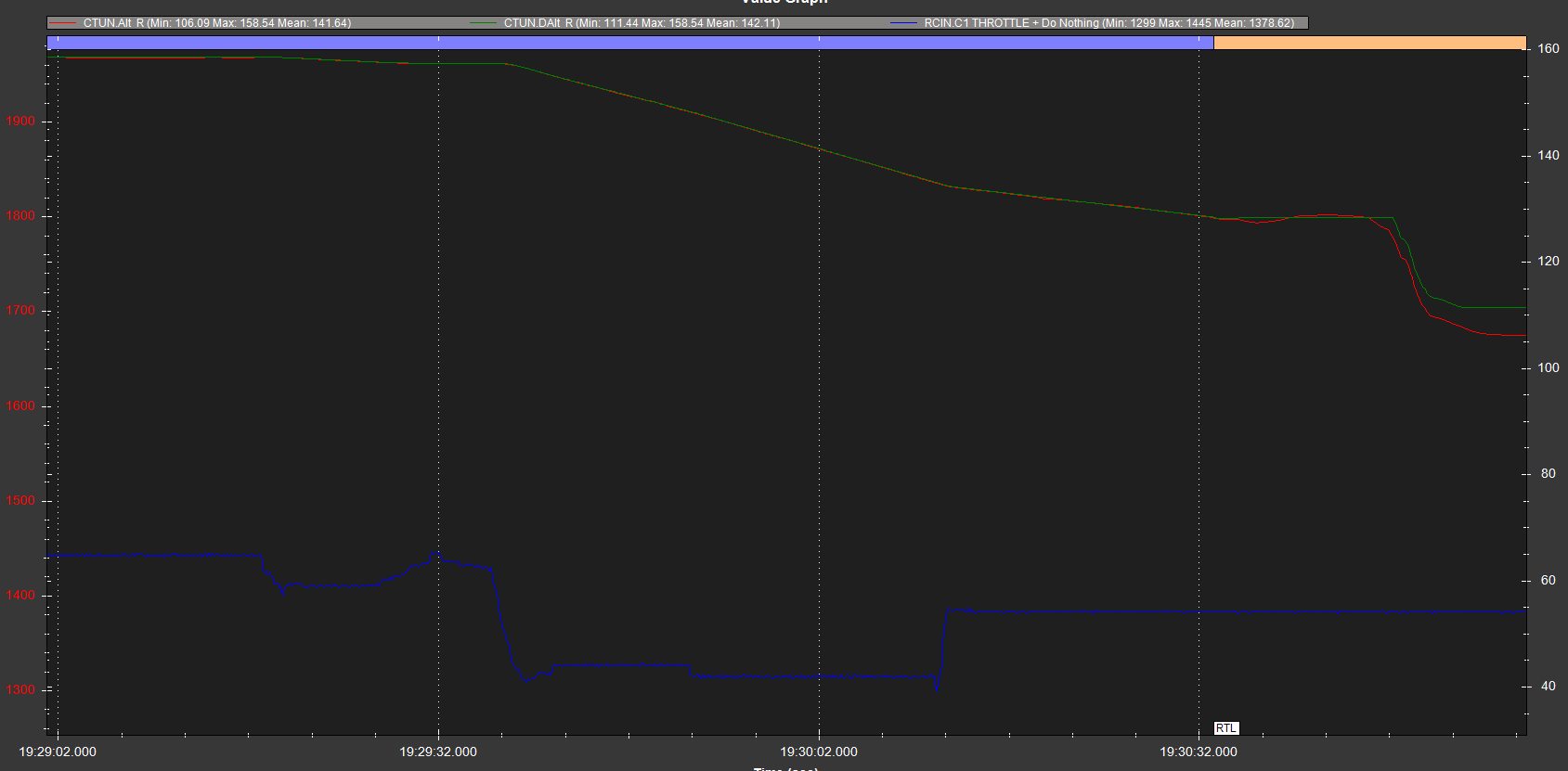
The copter was actually working as designed - when RTL triggered because of radio failsafe, Home was directly in front on the existing heading. RTL continued a downward altitude trend because
RTL_ALT,2000cm
You would have needed to include terrain data in the RTL action (rangefinder, terrain data on SD Card), or set the RTL Altitude much higher to avoid this crash.
Contributors
You armed and launched in Stabilise mode, switched to Althold and back to Stabilise a couple of times. There is no requirement to set the Home position in this case. As it happens RTL was working but there was no guarantee about where Home would be.
Correct settings for the Geo Fence would be strongly advised.
FENCE_ENABLE,1
plus set the altitude and range, and possibly a polygon to suit the specific environment.
This has the added advantage of preventing you from arming in ANY mode until there is a good GPS 3D Fix and Home can be set. (yes - I said advantage  )
)
Failsafes
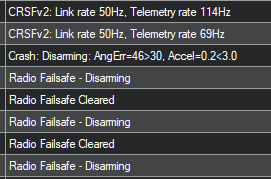
I would also investigate and test the radio failsafe action - you dont want the copter to disarm on failsafe, but rather RTL or Land, or continue if in Auto mode. I suspect there may be an atypical failsafe behaviour with Crossfire.
If working over long distances consider using rally points too.
You should also change these, as it’s unlikely your copter would be able to achieve RTL at critical voltage
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
Other
I cant say why video was lost, possibly because of the significant voltage drop during the crash.
If video was lost before the crash, that may be unrelated.