mr_byte31
November 18, 2024, 12:45pm
1
Hi,
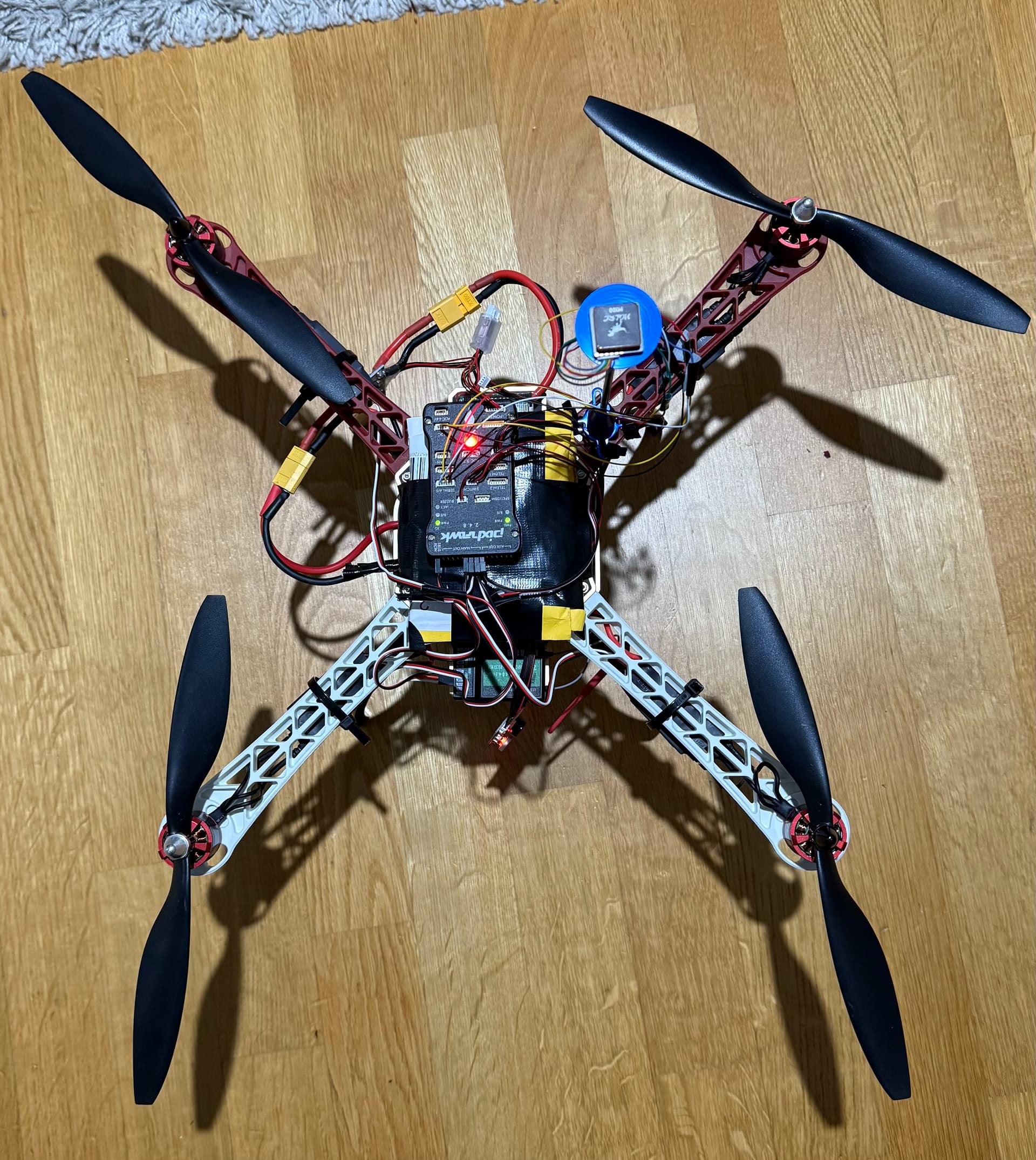
I am very close to finish my first quadcopter (F450 Frame) but it always flip over.
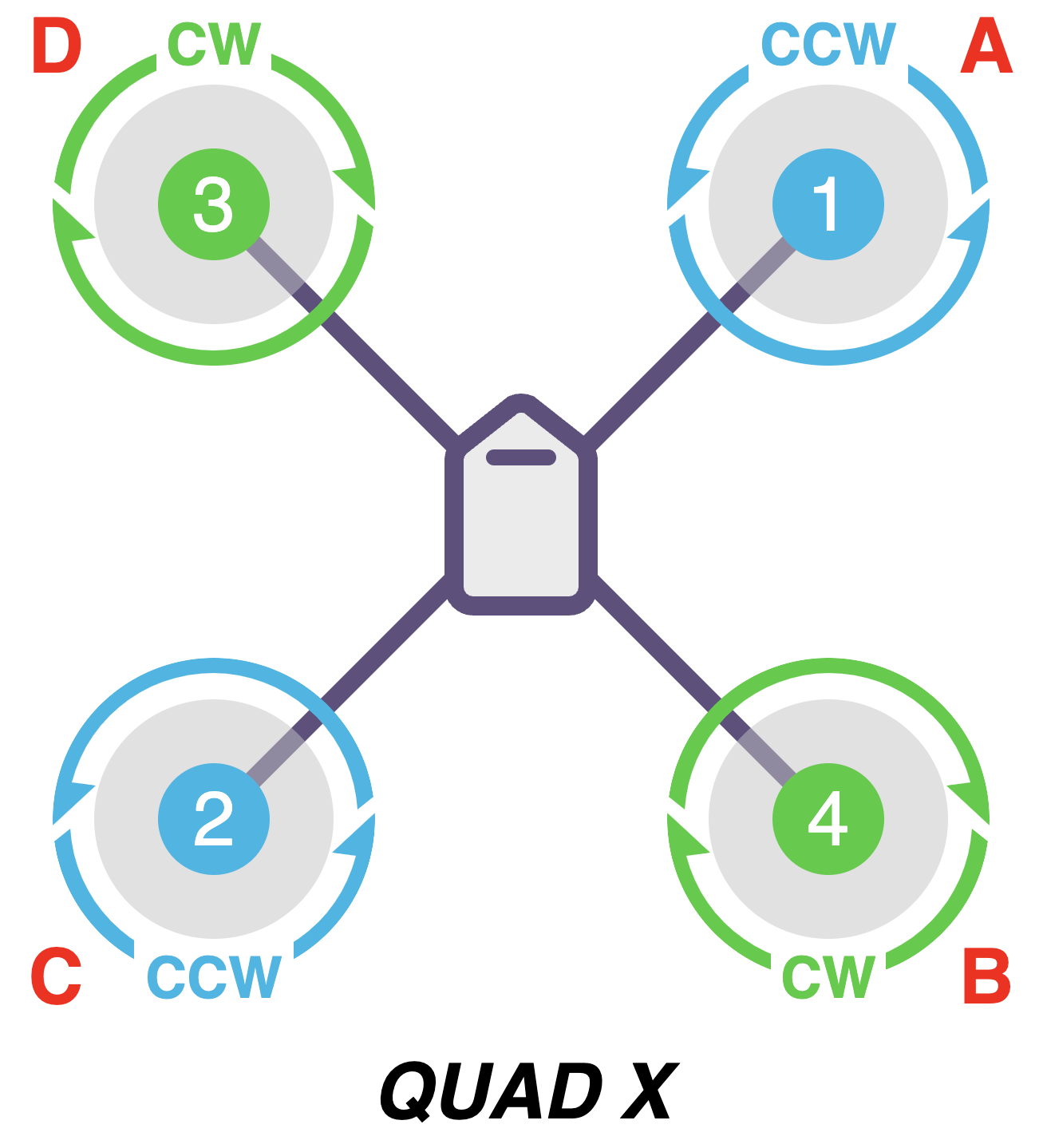
I did calibration to accelerometer and made sure the motors spin in correct direction ( CW and CCW).
I didn’t connect GPS or external compass at the moment and didn’t do any special configuration for that. I am not sure if the EKF3 would have issues because of this.
any idea how to figure out the source of issue ?
dkemxr
November 18, 2024, 1:20pm
2
It’s usually wrong motor order. Use Mission Planners Motor Test to confirm proper order.
Put a compass and GPS on it. Then tune it. Once tuned, remove the GPS and the compass.
Otherwise you are just asking for problems and pain.
1 Like
mr_byte31
November 18, 2024, 3:10pm
4
I made sure I have the following motor directions and each number reflects the channel on my Pixhawk (motor A is on correct location and it is connected to channel 1 on my pixhawk) :
dkemxr
November 18, 2024, 3:22pm
5
Did you confirm with Motor Test?
The correct order is ABCD, not 1234!
mr_byte31
November 18, 2024, 3:47pm
7
what do you mean by confirm motor test?
mr_byte31
November 18, 2024, 3:48pm
8
sorry, I didn’t get you.
I click on motor A to test and motor A is connected to CH.1 on my pixhawk.
correct procedure?
dkemxr
November 18, 2024, 3:54pm
9
mr_byte31:
correct procedure?
Read the docs, bottom of the page.Motor Test
mr_byte31
November 18, 2024, 4:04pm
10
I think I followed all the steps in the link.
dkemxr
November 18, 2024, 4:06pm
11
Simple question. Did you run Motor Test in Mission Planner?
mr_byte31
November 18, 2024, 4:48pm
12
yes of course.
I would love to get 1€ for every time a user tells me that
8 Likes
mr_byte31
November 18, 2024, 5:04pm
14
I pay you incase you are correct. Just prepare your paypal
I noticed I have this issue on the screen.
it says EKF3 Yaw inconsistent 160 deg. any hints ?
mr_byte31
November 18, 2024, 5:10pm
16
ok. I have to work on solder my wires for GPS.
for step 5. how should I do it ?
You should cross that bridge only when you get there.
mr_byte31
November 18, 2024, 9:37pm
18
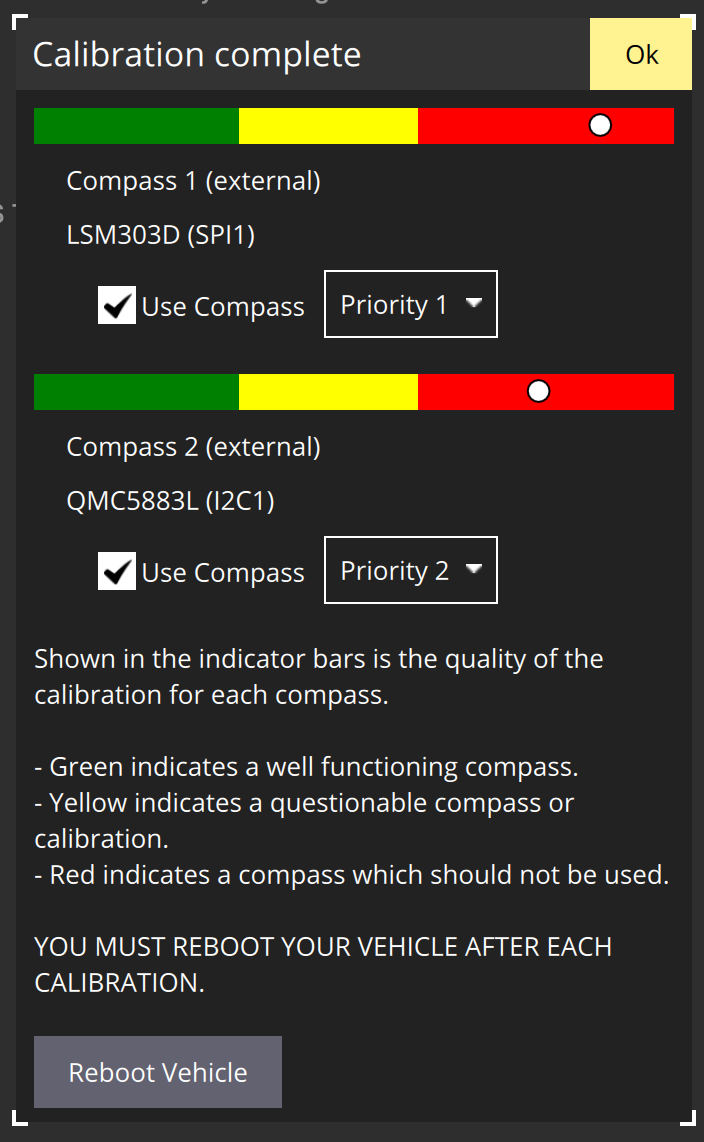
Ok. I added a GPS and compass to the setup.
I calibrated the compass and I could get GPS count =4 indoor.
I am not happy with my calibration but can’t get better than this.
any more suggestions ?
mr_byte31
November 18, 2024, 9:48pm
19
I made a video for the propoller rotations.
some propellers didn’t run from the beginning. this is the first time to happen with me.
dkemxr
November 18, 2024, 9:59pm
20
Why are you not using Motor Test in Mission Planner for this?