Project for a hot-air balloon with an autonomous flying wing for instrument recovery.
This is a huge opportunity for me. I know almost nothing about autonomous systems, so I want to learn and exchange ideas about how to build a foam flying wing that will be attached to a hot air balloon.
This balloon will reach an altitude of 25,000 meters, at which point the helium balloon will burst. It will begin its descent with a parachute that will lower it to 5,000 meters. At that moment, the parachute will detach, leaving the wing, with the instruments inside, and descend automatically under control to a predetermined location. That’s the idea.
I would need guidance on how to build the wing and what electronics would be needed to make the final descent until recovery.
We don’t need an engine or a propeller… just the ability to program its descent to a free, controlled area, a complete controller board, with GPS, navigator, and the ability to control the final descent to the ground. The instrumentation weighs just 600 grams, and adding the controller and its battery, the total weight for the control shouldn’t exceed 1 kg, including the wing. Thus, the helium balloon is small. This is the general idea, and I would like you to participate with me in this recovery project, unique in the world of hot air ballooning.
You don’t need a parachute on a flying wing. Loitering to the ground will be slower but you will save on all the chute related mass.
Most hobbyist grade equipment will be on the verge of its temperature limits or beyond at 25km, especially the servos. You may get condensation during descent.
if its just gliding look at disposable lithium batteries, they are good down to about -40c, you can buy them just about anywhere that sells AA batteries. I think they are around 3.3AH.

Hello Lupus.
The problem with the balloon is that at altitudes of 25,000 meters, the balloon bursts, dragging along the latex debris. At that moment, a nichrome blade is activated, burning the bond between the latex and the rest of the material. When it’s released, it begins to fall, but you have the parachute. This is because at that altitude, the air density is so negligible that only a parachute is viable to begin a more controllable descent. When it reaches a height where the wing flies well, be it 5,000 meters or less, it then releases the parachute and the load, which is included in the wing to protect it from the cold and impacts. It begins its flight. At this point, it will be located by GPS and will begin its flight with an adequate density, responding to programmed commands. It has a very good altitude to be able to navigate quite well… that’s why I’m trying to design a wing with protected servos.
Hello GEOFRANCIS.
I’m not worried about the batteries because this is the sixth balloon we’ve launched, and the lithium-polymer batteries work very well, without any problems.
This is the first time we’ll attempt to launch the instruments, APRS transmission antenna, and systems onto a commandable, programmed wing.
It’s quite an experience because it would be the first time the instrument package is supported by a commandable, programmed foam wing… and wherever it is, it can navigate to the landing site. The altitude and wind conditions are such that it could be over the Rio de la Plata, in South America, and so as not to lose the instruments, the wing could perform the function of gliding back to safety on the ground.
As long as you don’t run into issues witch Mach number (and you shouldn’t with how fast model aircraft fly at sea level) plane will be controllable at 25km, just TAS will be 6-7 times higher but IAS should be roughly the same as at sea level.
Okay, I don’t quite understand the acronyms TAS and IAS. Sorry if I don’t understand; I’m new to flight automation. The reality is that the balloon travels depending on the air currents. Sometimes, up there, it picks up a very strong one and reaches speeds of 160 kph, or sometimes more, but it’s only occasionally, while the balloon is inflated, or when it’s falling with the parachute. Upon reaching an altitude of 5,000 meters, the parachute is detached, and from there on, the wing would fly free, at which point it should correct its course and travel at a downward angle toward the scheduled landing point. The simulator tells us approximately where it would fall, or in what area it could touch the ground, so it’s estimated that at 5,000 meters it would be at a previous point, and from there it would fly controlled until it touched down. The APRS traces tell us where it is, and the GPS tells us its position online. That’s why I need to know what electronics I should install to be able to fly programmed. I intend to build a similar wing, out of foam, and with the electronics you recommend, bring it in and install it, test it to see if it flies by launching it from a radio-controlled airplane or model aircraft… to see if it returns to the programmed point. I’d be interested in knowing what controller, GPS, and other electronics I should get to do the first test, and how to program it… I’m just learning. Thanks.
Even if you have 160kph wind the balloon/chute has pretty low airspeed (at least horizontal component) as it is dragged around by the wind.
TAS is true air speed, if you dropped infinite
drag pixie dust you would be flying away from it at true air speed.
CAS is corrected air speed and is proportional to square root of dynamic pressure, in smaller drones CAS and IAS (indicated, no corrections) are often conflated.
When you fly high up your true air speed will be much higher than your calibrated air speed as there is less air to hit you plane so you have to go faster to hit the same amount of it.
Your plane likely can fly at 25km, it will just going 6-7 times faster which is fine because there is roughly 40 times less air up there.
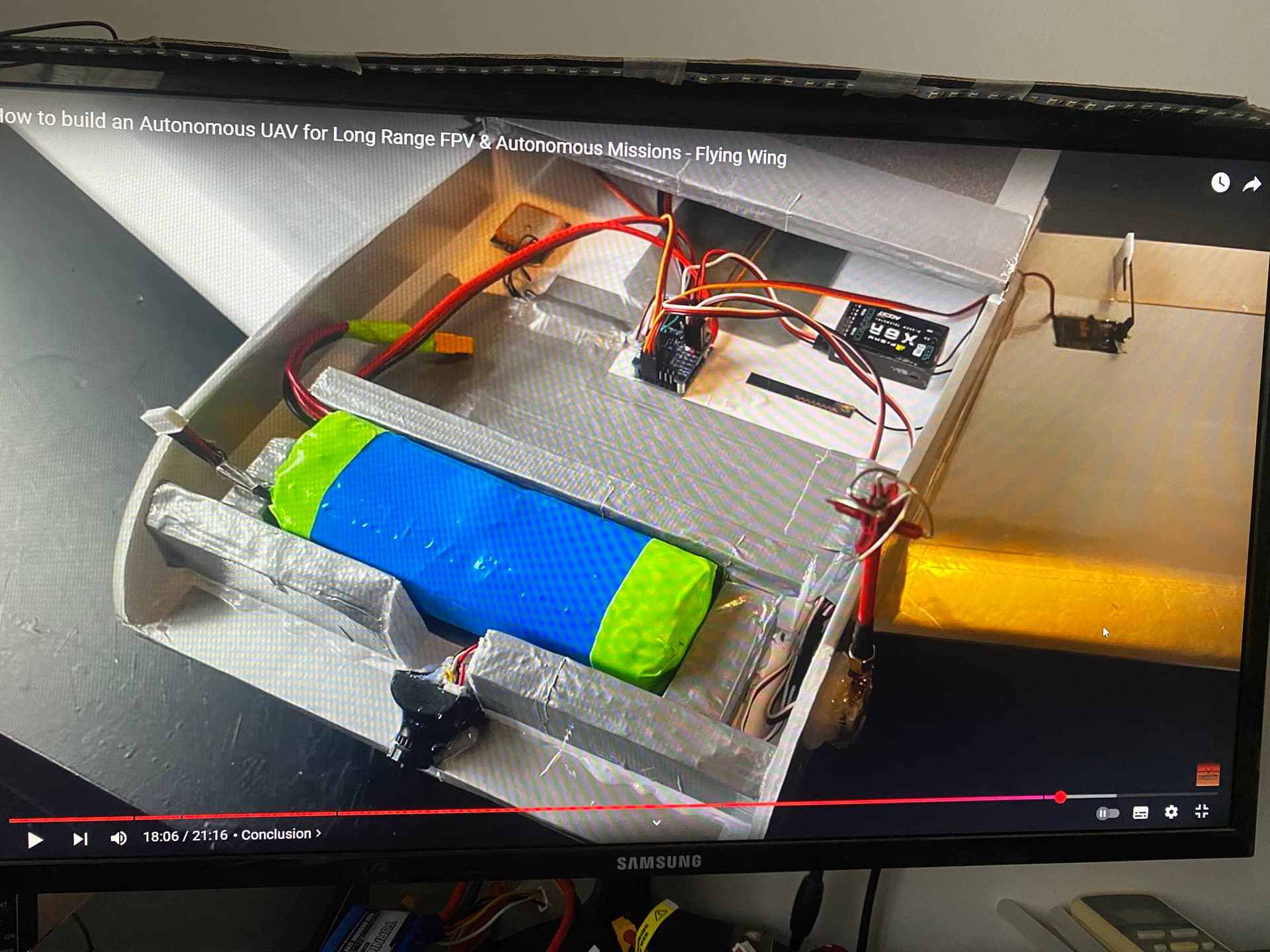
Watching the flying wing on YouTube, https://www.youtube.com/watch?v=SA-BsyLVYNk
I see it has a GPS, a flight controller, and other components like a video transmitter and RC receiver. Can you use it to fly the wing without using the video transmitter or receiver? That is, program a landing site and have it glide there on its own? That’s what I’d like it to do. I see the BN220 or BN880 GPS on the materials list. Which of these two GPSs is better and is smaller and lighter?
Same question with the flight controller. MATEKSYS F406 wing V2, F411 WTE, SPEEDY BEE F405? The lightest and smallest? That way, I’ll bring the necessary materials to later build the wing (I also need the plan… If I become a YouTube member, will they let me download the plan?). Thanks. As you can see, I don’t know anything about this autonomous thing… I’m just learning. I’m a normal aeromodeler, just into RC planes and nothing else. It’s all new to me. And then how to program and with what… those are other questions that will come later.
Thanks, and excuse me if I ask you innocent questions.
Thanks, Hugo.
The basic question is: without a motor, ESC, or receiver, is it possible for the Flyght controller and its associated GPS functions to glide to a programmed waypoint? That’s the test I want to perform before installing the APRS and SSTV electronics. My time is running out to solve this problem, so I have to build the wing, bring the flight electronics, program them, test them… to then give my colleagues time to install the other electronics. Thanks for your help, and if anyone else wants to lend a hand on this project, they are WELCOME!!! I’m leaving it open so everyone can contribute their experience.
Thanks.
Hugo.
This is the example I saw, and it’s very close to the idea we have for the balloon… something practical and capable of installing electronics and batteries. The inquiries I’ve made are based on these images… and considering that I don’t need to control it with RC equipment, I don’t need a receiver, camera, or image transmitter. At least in this balloon model, which is small in volume and payload. Perhaps, later, if we get good results with this first project of a wing hanging from the balloon, we can apply the knowledge to another larger balloon, so it can carry more payload, with a wing, and then be able to SEE and control it from the ground when it comes within radio range. This will be in the FUTURE. Now, we want to conduct the first experiment with a light, small payload. I greatly appreciate all the attention and patience you’re showing… I continue to learn at 66 years of age.
Thank you.
Hugo.
tresclavos@adinet.com.uy
It seems like you are very new to ArduPilot and the RC world - so maybe worth buying a cheap Fixed Wing kit and learning the software/hardware before embarking on this project. You could easily re-use the autopilot/GPS/radios bought for the kit/cheap aircraft in the ultimate aircraft used for this project.
You will need RC control and telemetry link for tuning. Video is not necessary.
After you have configured and tuned your plane you can configure it for link less operation though AFAIK in EU and USA flying without any control link isn’t legal without appropriate paperwork.
For your setup you will need
- Flight controller, I would definitely go with H7 based one as it is much much easier to customize behaviour with lua than modifying C++ code.
- GNSS receiver, anything with uBlox M10 and preferably compass
- Airspeed sensor, anything compatible with Ardupilot will work though I would avoid analog sensors. It will let TECS work with no motor and be more reliable than synthetic airspeed.
- RC setup
- RC receiver, go with ELRS as it is fairly easy to work with and can support MAVLink telemetry
- RC radio, I would recommend going with something running EdgeTX as then you can use Yaapu’s telemetry script. Radiomaster makes good radios.
Manav is right, learn Ardupilot on a cheap 4 channel plane before playing with extreme range and altitude automatic flight.
Okay, thanks, MANAV.
I’m simply a traditional builder, currently using foam and building simple, 4-channel gliders.
Right now, I’m finishing one with a 1800mm wing, electric motor, and foam. I’ve never used ARDUPILOT or anything like that, I only flew freehand. I’m figuring out what I need to get started. Whether it’s this glider or building a different one, I already have the plane. Now, as for the radio, I have a RADIOLINK AT9S, and I’m figuring out if it’ll work for me. If not, I’m looking for a radio that works and I can bring it to my country. I was looking at the RADIOMASTER TX12 MKII. Can you tell me if the one I have will work or if I need a new one? Thanks.
R6DS UserManual- 20201229.pdf (366.5 KB)
I have this receiver of RADIOLINK. This is the receiver’s manual, could you tell me if it works? Thanks.
It will work but:
- its compatibility with Ardupilot is limited, you won’t be able to receive Ardupilot telemetry
- Separate telemetry link will be required (tuning without telemetry is PITA)
- Radiolink is known to be in violation of Ardupilot GPL license on some of their flight controller hardware.
Some older radiolink protocols are supported by multiprotocol module DIY-Multiprotocol-TX-Module/Protocols_Details.md at master · pascallanger/DIY-Multiprotocol-TX-Module · GitHub
if you use majority of them you could consider getting Radiomaster with internal 4-in-1 module and external Radiomaster Nomad TX module.
While you can’t adjust configuration from handset (yet on H743 FCs) using ExpressLRS you can monitor status messages.
If you are going for ELRS only radio I would go with GX12 if you are ok with B&W screen (see Yappu’s telemetry script on B&W vs color radios) or go with Radiomaster TX16S if you decide that higher resolution color display would be more useful.
I’d like to ask you a question…
Can the TARANIS Q-X7 radio work, due to protocol issues, etc.?
Which receiver is suitable for that radio?
I’m looking at options other than the RADIOMASTER TX16, because there’s also the TARANIS TX12… Would any of these radios work?
Thanks.


Hi, can you please tell me if the TX RADIOMASTER BOXER 16-channel with a 4-in-1 module will work?
Thanks.