Hello Everyone,
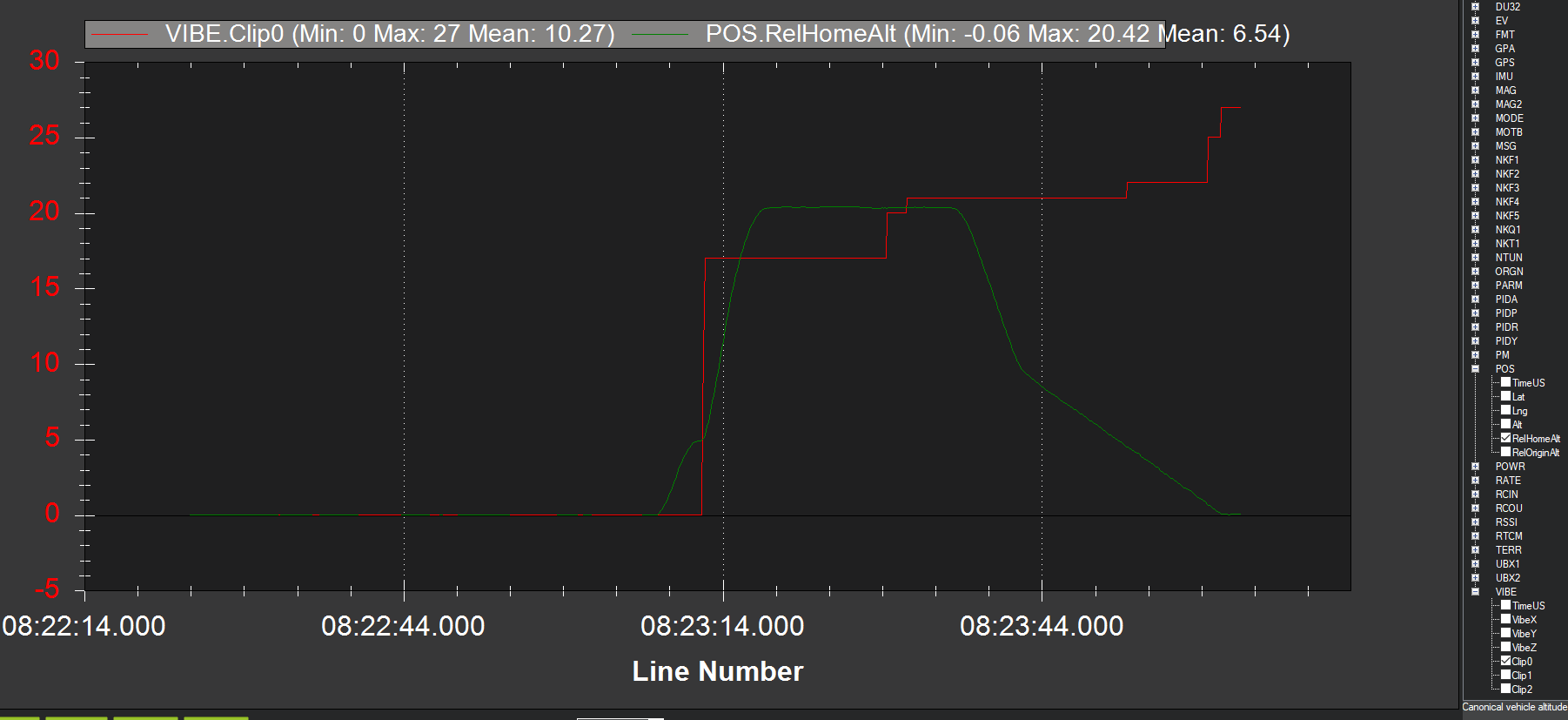
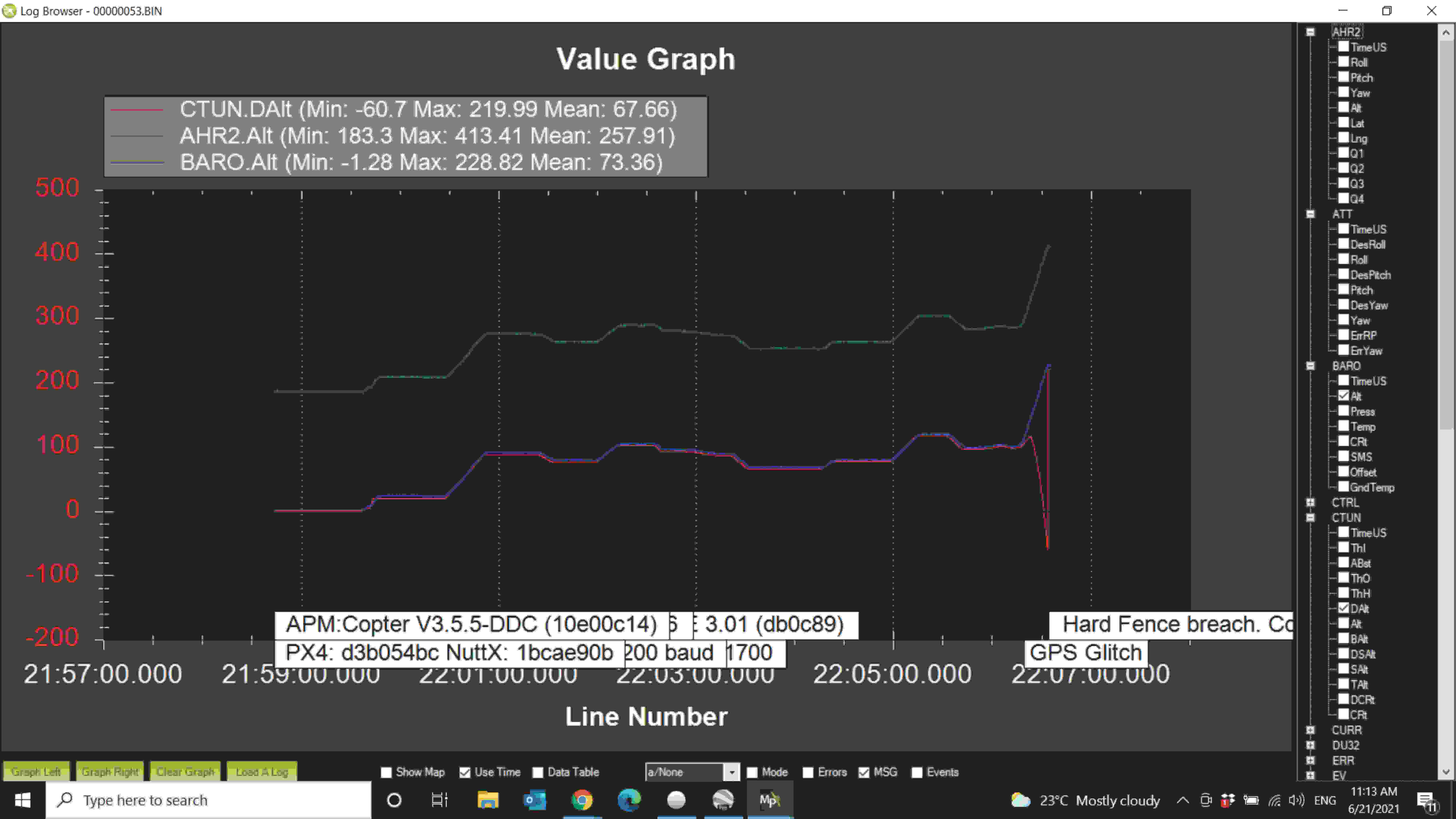
We experienced a flyaway during an RTK GPS waypoint mission. Looking at the log, we see that CTUN_DALT goes down rapidly to a negative value just before the GPS glitch warning is triggered. This caused the drone to rise rapidly until it hit the geofence, disarmed, and fall down.
We use two levels of geofencing, the first fence is set to RTH, and the second one which is 15 meters away is set to disarm. We were flying multiple drones on that mission, and this glitch affected a few of them, during the 10 minutes mission, at different times.
The log file can be downloaded here: https://drive.google.com/file/d/1rGL4Ovdq53_V-UB877zLawhCyNv-9WLA/view?usp=sharing
The above log and graph are typical for the other drones that also failed, we always see a discrepancy between CTUN.DALT and BARO.ALT a few moments before the GPS glitch happens and the drone flies away.
Our drones were calibrated on site, just before the mission.
Any insight into what may have caused this would be greatly appreciated.
Sincerely,
Patrice