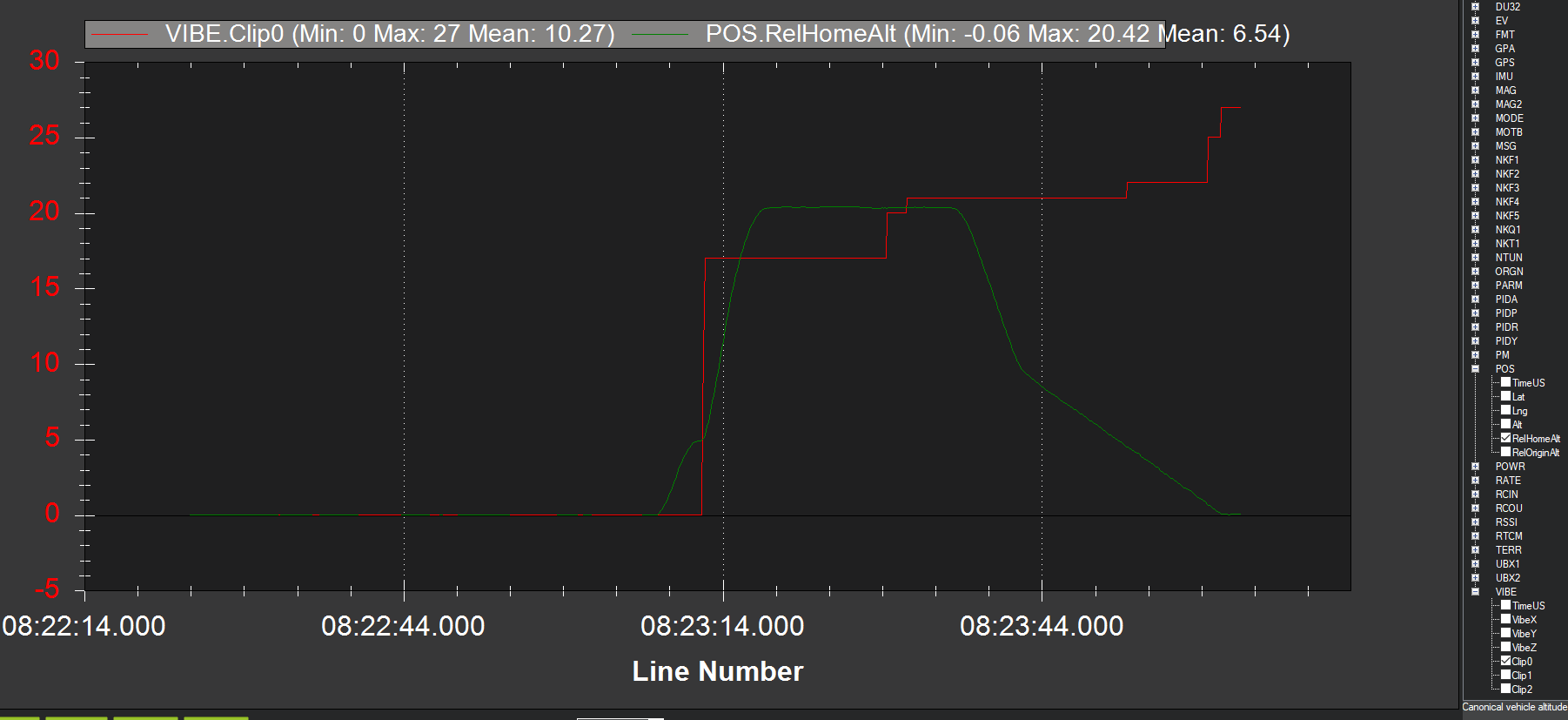
Under the VIBE section in log analysis tools. Check for the same trend on the other aircraft.
Also try GPS_GNSS_MODE,65 or 67 and see if that improves reliability.