Z axis vibrations are less than ideal, that will affect tuning. So if you can improve the vibration isolation of the flight controller, make sure nothing is touching or pulling on it and all wiring is secure - That will help.
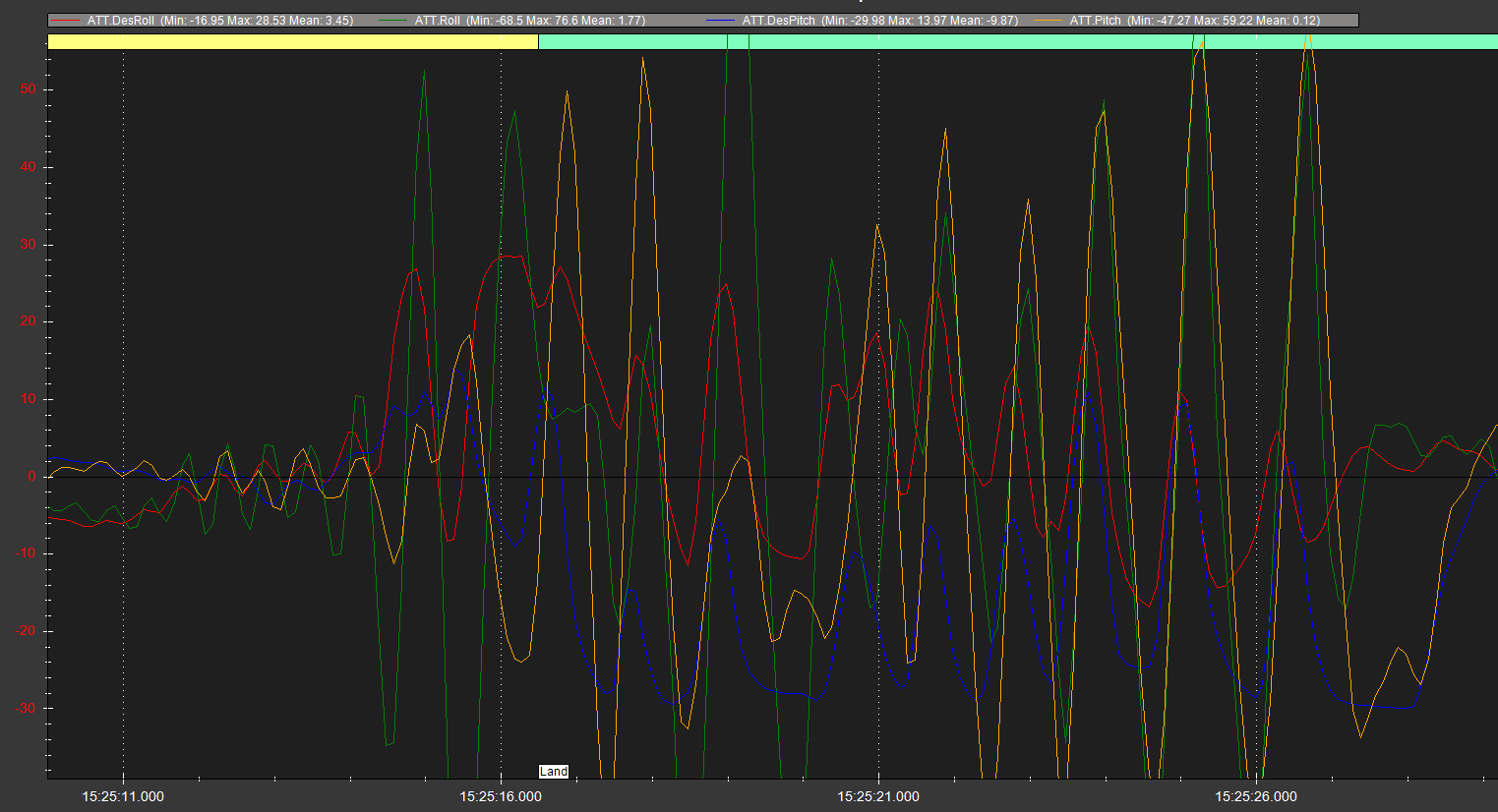
You can see pitch and roll control is a bit noisy and it seems to start getting a bit worse over time. Oscillations are appearing.
The oscillations become bad and attitude control is almost lot - you did well to get it landed. Some people would probably try lots of pitch and roll stick inputs and make it worse.
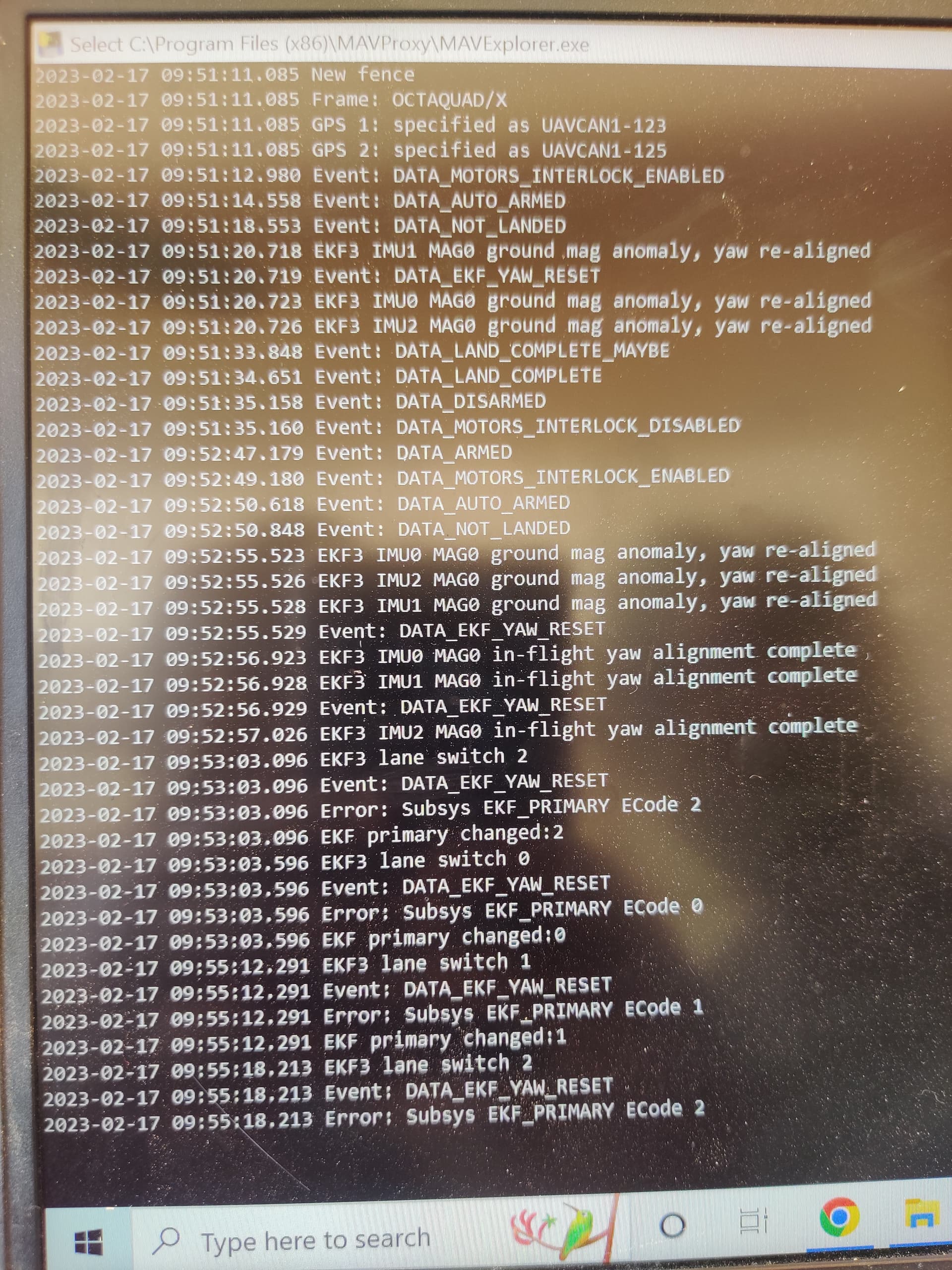
This doesnt seem to be related to any one motor, the flight controller is employing all motors to do the best it can. Battery seemed OK too and not the cause.
I think it’s just poor tuning (no tuning started yet) and maybe wind increased.
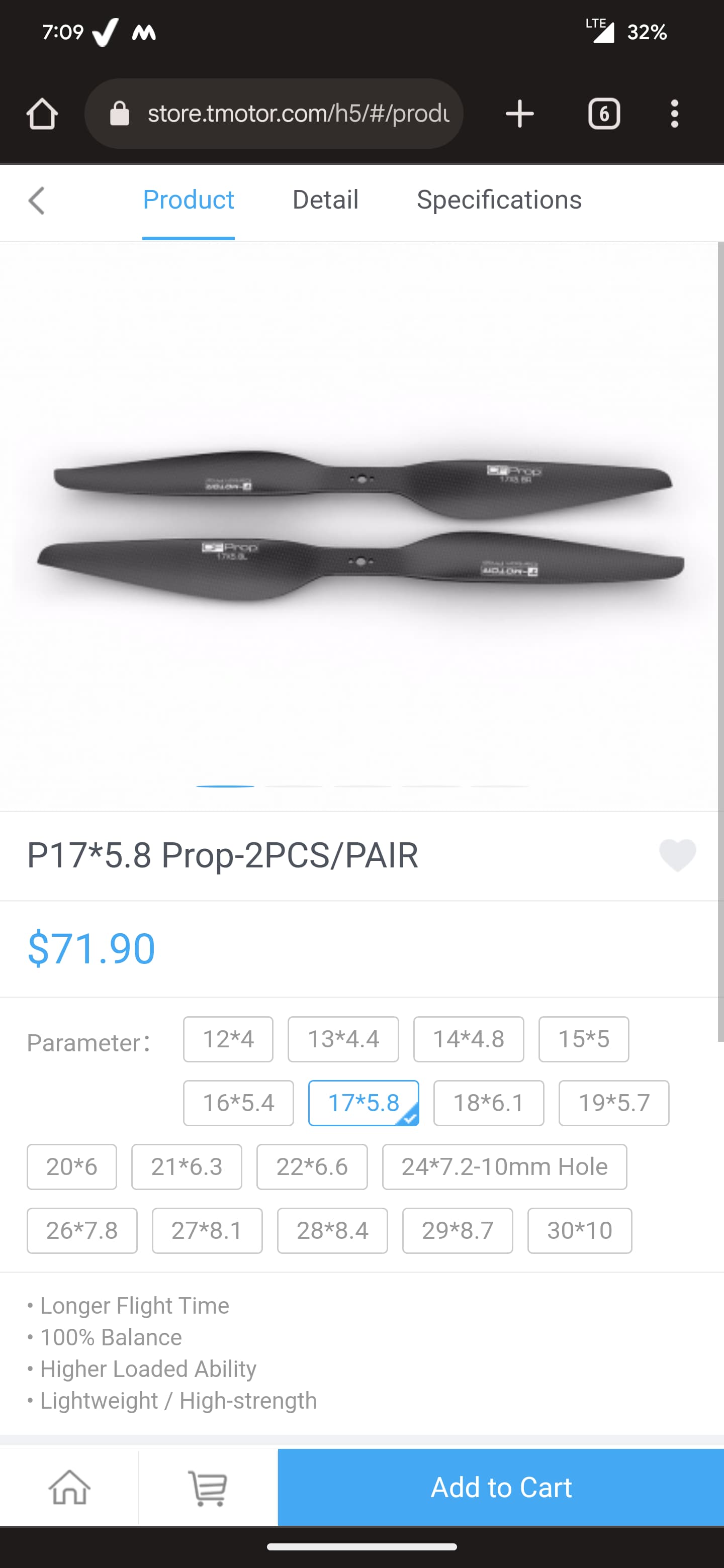
It would be good to know if motors were getting hot with those 17inch props.
Set these for general tuning and safety, with your copter in mind
BATT_ARM_VOLT,22.10
BATT_CRT_VOLT,21.00
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
BATT_LOW_VOLT,21.60
BRD_BOOT_DELAY,3000
FENCE_ENABLE,1
GPS_GNSS_MODE,5
GPS_GNSS_MODE2,5
INS_ACCEL_FILTER,10
INS_HNTCH_BW,25
INS_HNTCH_ENABLE,1 ← set this then refresh to see the rest
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_FREQ,50
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.16
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
MOT_BAT_VOLT_MAX,25.20
MOT_BAT_VOLT_MIN,19.80
MOT_SPIN_MIN,0.12
These PIDs might be a good start
ATC_ANG_PIT_P,6.5
ATC_ANG_RLL_P,6.5
ATC_RAT_PIT_D,0.005
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_P,0.12
ATC_RAT_RLL_D,0.005
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_P,0.12
and these will settle down the position controller, for example Loiter mode wont try to hold a wandering GPS position so strictly
PSC_ACCZ_I,0.4
PSC_ACCZ_P,0.2
PSC_POSXY_P,0.5
PSC_VELXY_D,0.25
PSC_VELXY_I,0.5
PSC_VELXY_P,1.0
As with any of these changes, start in Stabilise mode and if there’s any oscillations land immediately and reduce the ATC_ANG_PIT_P and ATC_ANG_RLL_P values by nearly 50%.
If everything seems OK change to AltHold and try some gentle pitch and roll movements.
You dont have to go all aerobatic or run missions, this flight will just gather data for more changes.