Hello,
We are flying the Tarot 650 drone with mRo 2.1 Autopilot and Herelink.
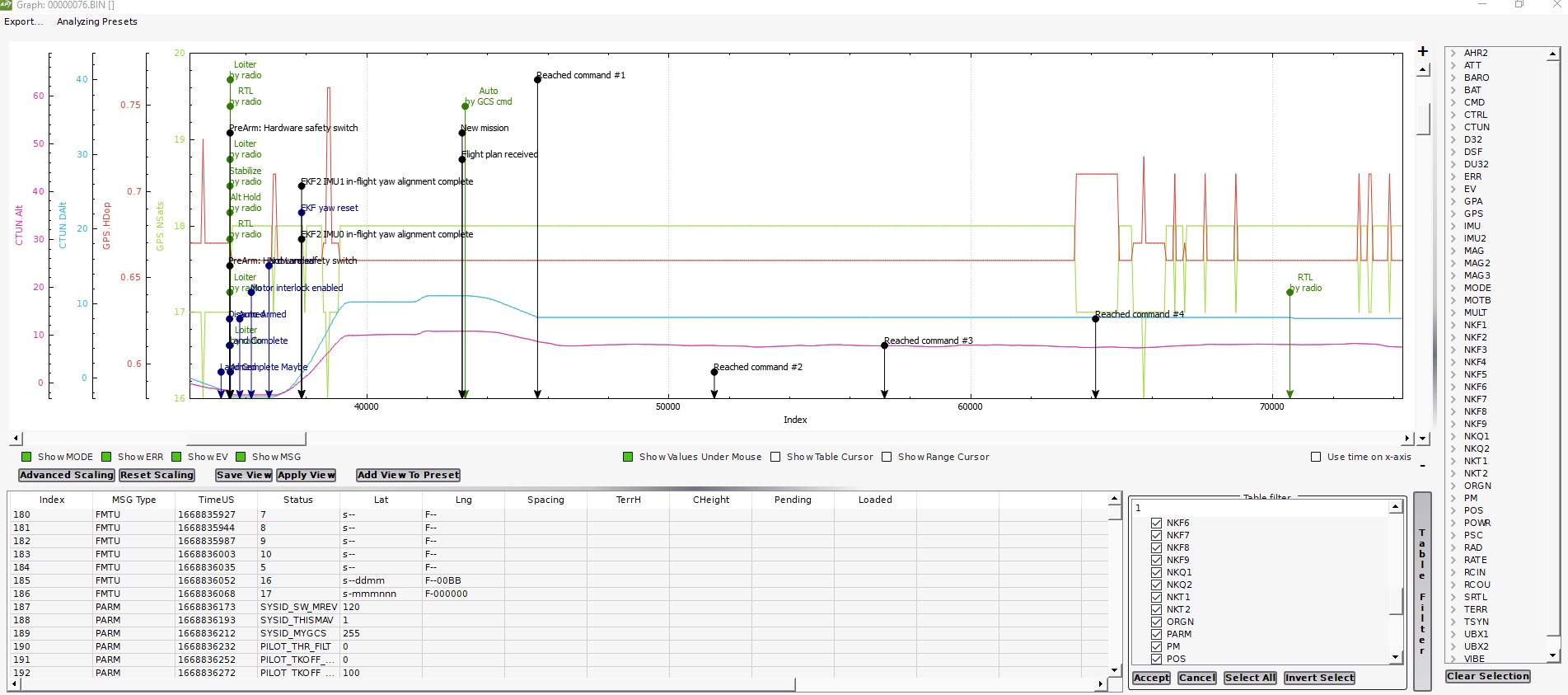
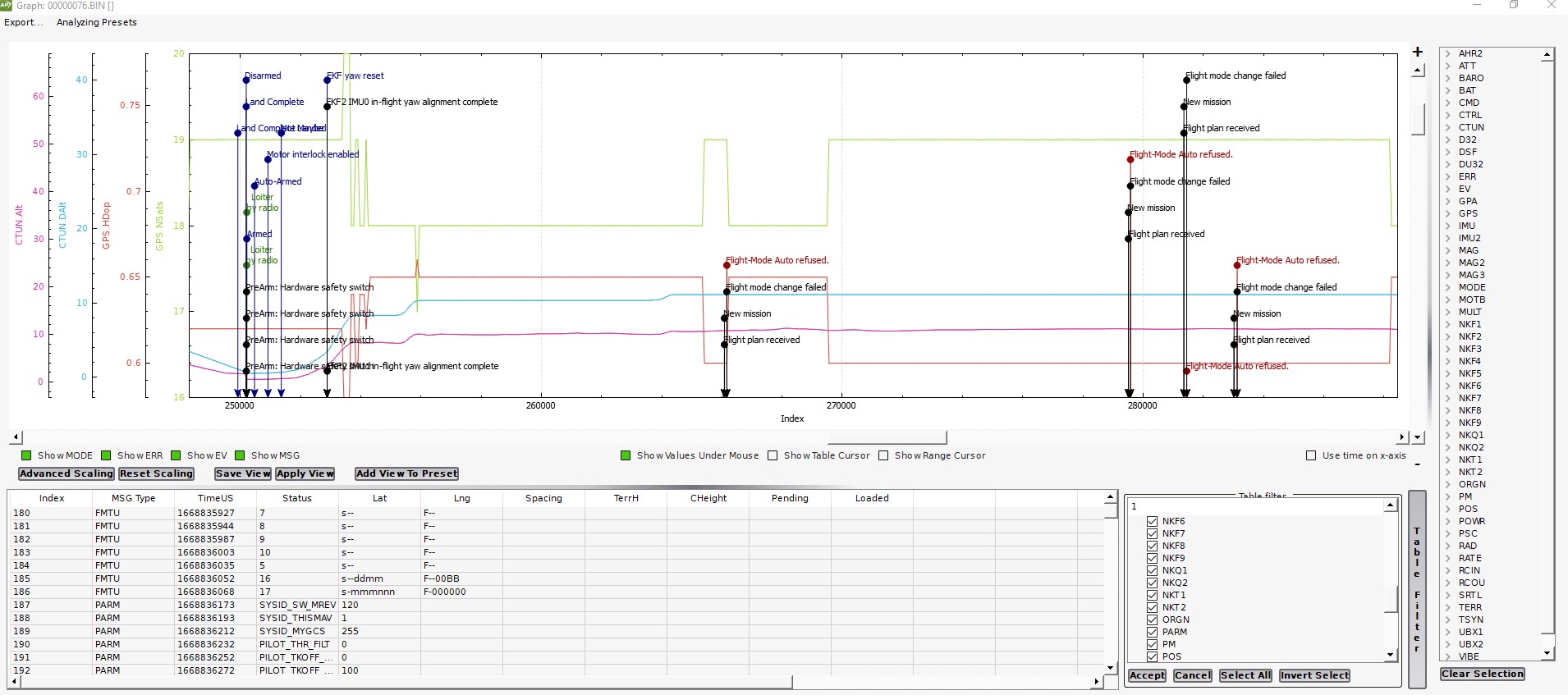
Sometimes the drone refuses to switch to Auto mode without giving any error message. I have checked our NavSats are > 12 and GPS HDoP is < 1. Following are two images of the log where auto mode was accepted and refused.
It is most likely the AKF innovations.
Have a look at the EKF Wiki especially the EKF4 values.
Try the copter on the ground and switch to Auto, then try to arm.
You will probably get the Velocity error messages appear in your messages tab telling you what is wrong.
If you look at my parameters on the right of my images, I do not have EKF params. Instead I have NKF1-9 (NavEKF). Which is of these should I be looking at? I having a hard time finding more details on NKF.
Thank you for the help. We have figured out our problem. For anyone else looking, we were loading the waypoint incorrectly. To be precise, the only waypiont had is_current value as false. hence, auto mode did not really have a waypoint to follow, even though it had a mission uploaded.