Greetings to All.
I am currently in the process of assembling a Hexacopter drone with a weight of 150kg, and I find myself seeking the wisdom of those more experienced in this endeavor. I am humbly reaching out to inquire about the calibration and tuning procedures for a drone of this substantial size.
Having completed the construction and successfully performed the maiden flight, I am now faced with the intricate task of parameter adjustments and tuning. However, given the unique considerations that arise with a drone of such magnitude, I am unsure if the standard calibration procedures apply or if there are specific parameters that warrant special attention.
While I am proud of the progress made so far, I acknowledge that my expertise in setting up and fine-tuning a drone of this scale is limited. Therefore, I am earnestly searching for a mentor who would be willing to share their insights and guide me through the intricate process of optimizing this aircraft.
If any of you gracious individuals possess the experience and willingness to serve as a mentor in this journey, I would be profoundly grateful for your assistance. Please consider replying to this message if you are open to engaging in a mentorship, and we can explore the possibilities together.
Thank you immensely for your time and consideration.
Hello Amilcarlucas
Thank you so much, I am very exited to learn from you.
I will do as you said, I will read the documentation and come up with the questions
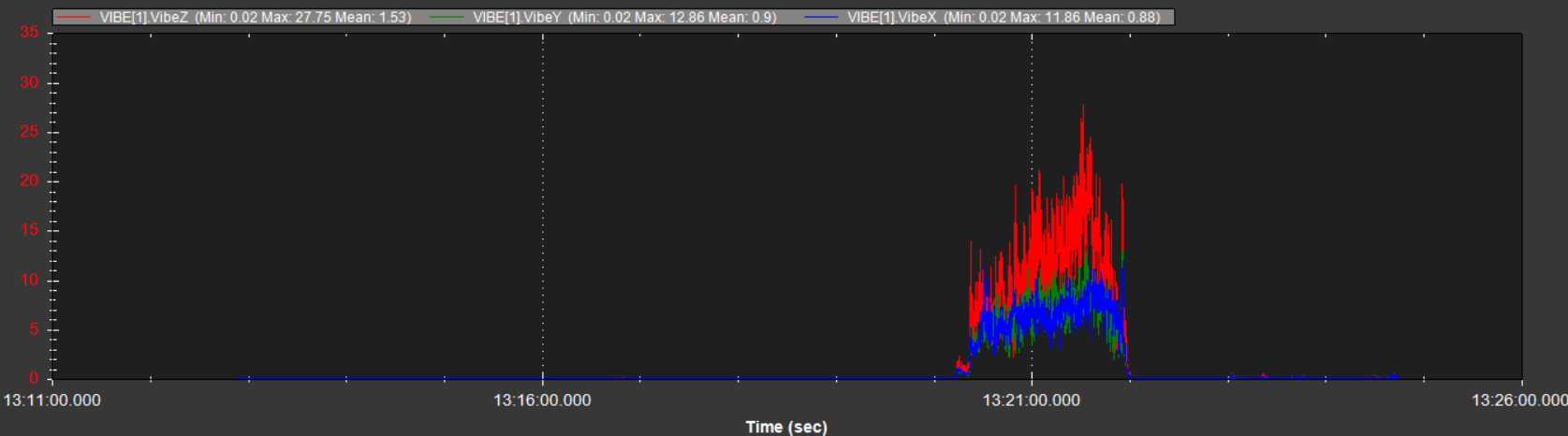
Relatibly high vibration in Z axis compared to X and Y
The ardupilot Document says that it could be due to prop bending or problem with the motor bearing. But the motors and props are new, and I am flying it in its lightest configuration, so I doubt that could be a reason. Need help on this
High EKF error in Compass
I think this is due to high EMI produced by the Power Supply, my max current consumption is 400A, but till now I have just used it till 200A, I am using 2 here3 GPS, internal compass is disabled need some help to shield the FC and Compass.
Hello Sir, @amilcarlucas,
I used mu metal sheets, and the compass error is reduced significantly,
but during takeoff and landing the errors will shoot up very heigh…
Someone told me that its common… Is it true?