Could you say if first flight in loiter mode is better than stabilize mode ? (and why)
For me Loiter mode is much better and easier. Stabilise is still a required mode though!
You can easily take off and land in Loiter mode - I would recommend setting up a Geofence radius and ceiling, your craft wont arm until it has a good 3D GPS fix. This means Loiter will work right from take-off and reduces the chance of a fly-away. You also have plenty of time to stand around and think while the GPS does its thing. Test if switching from Stabilise to Loiter works before take-off.
For me Loiter is like a (dare I say it) “DJI” controlled, smooth mode, and Stabilise is like a manual “racing car” mode.
Loiter will hold position and altitude if you just centre the sticks and let go of them, allowing you to collect your thoughts and re-assess a situation. Loiter movements tend to be controlled and predictable. Loiter will be “speed limited” and provide active braking and fight against wind. Rates of change are limited.
Loiter stick movements translate into: I want to go up, I want to go down, forward, back, and so on - and the craft steadily follows your wishes regardless of wind or some slight imbalance.
Loiter can still need plenty of tuning to get it how you like it, but defaults will work.
Stabilise can be twitchy and hard to control for someone like me who is not good with “RC” controls - my pilot is however, and I am usually just “ground crew”. Stabilise can quickly get out of control if you don’t know what you’re doing and don’t know your craft. The craft will drift with wind and momentum as if it’s frictionless.
In Stabilise sticks are pretty much in direct control of the motors (in a manner of speaking), flight controller will blindly follow stick-input but stay within limits like ANGLE_MAX. There’s no active braking or any other assistance except trying to stay the right way up. Acrobatic manoeuvres (and flips) are not catered for, you’d need to set up your Acro mode for that. There is a Flip mode if you really must…
Stabilise is still the “go to” mode you need to have set up and working for when GPS or something else goes bad.
Caution: Changing from Loiter back to Stabilise in flight :- ensure throttle stick is centred or craft will shoot up like a rocket or drop like a stone. Wind will start shifting the craft around.
The relevant wiki page is: http://ardupilot.org/copter/docs/flight-modes.html#recommended-flight-modes
If you are flight testing a new copter, I’d recommend first using Stabilize mode.
Yes I’d agree with kd0aij - a first flight, or tests of major changes should always be done in Stabilise mode.
For testing I find it good practice to take off, fly and then land in Stabilise mode. Disarm and then re-arm and fly again if you’re going to test out Loiter - this ensures Home position is set positively as there’s a good chance GPS has a very good 3D fix.
I took the original post to be asking what to expect the first time trying Loiter mode.
If GPS Fix is less than 1 meter and GPS compass calibrated, why not use loiter mode in first take off ?
If there are vibration or other issues, your vehicle could toilet bowl and go away (and crash) if you start in loiter/position hold mode.
As others have stated, start off in Stabilize mode. If everything appears functioning okay and vehicle is reasonably stable, switch to Altitude Hold mode, and assess the vehicles stability.
At this point best to switch back to Stabilize mode and land. Download the log files and check the vibration levels. If they look reasonable, then switch to Loiter/Position Hold on your next flight and assess the vehicles operation. If things do not look correct, switch back to altitude hold mode, land, download the logs, and try to determine what is wrong.
This comes from a little bit of experience. My first ever flight in my first home made UAV was in Loiter mode. Was not pretty. Had the toilet bowl going on, fly away, and crash. Frame was a write off, plus some other damage to other components. Luckily there was no third party harm done. Have Altitude Hold mode and Stabilize mode available and confident in their use. They will help you out if things go sideways.
Being able to flight and control your vehicle in Stabilize mode is a must. There is always a possibility that GPS, MAGNETO, BAROMETER fail and you have to fly and land in stabilize, so you must be prepared for that.
I also agree that until you convinced that vibrations are OK, you must stay in stabilize, otherwise you risk a flyaway.
And last but not least, not able to fly in stab (Atti) mode is characteristic of the self proclaimed drone pilot DJI shenanigans… 
First flight stabilize, if vibrations are in the range (according to documentation) I will able to flight loiter mode ?
The main difference between loiter and stabilize is vertical hold ?
in a nutshell
Stabilize - you have direct control of motor throttle and copter position - need only good IMU
Alt-Hold - Motor throttle controlled by FC, position maintained by you - need good IMU + Baro
Loiter - Motor throttle & position is maintained by FC - Need good IMU, Baro, MAG, GPS
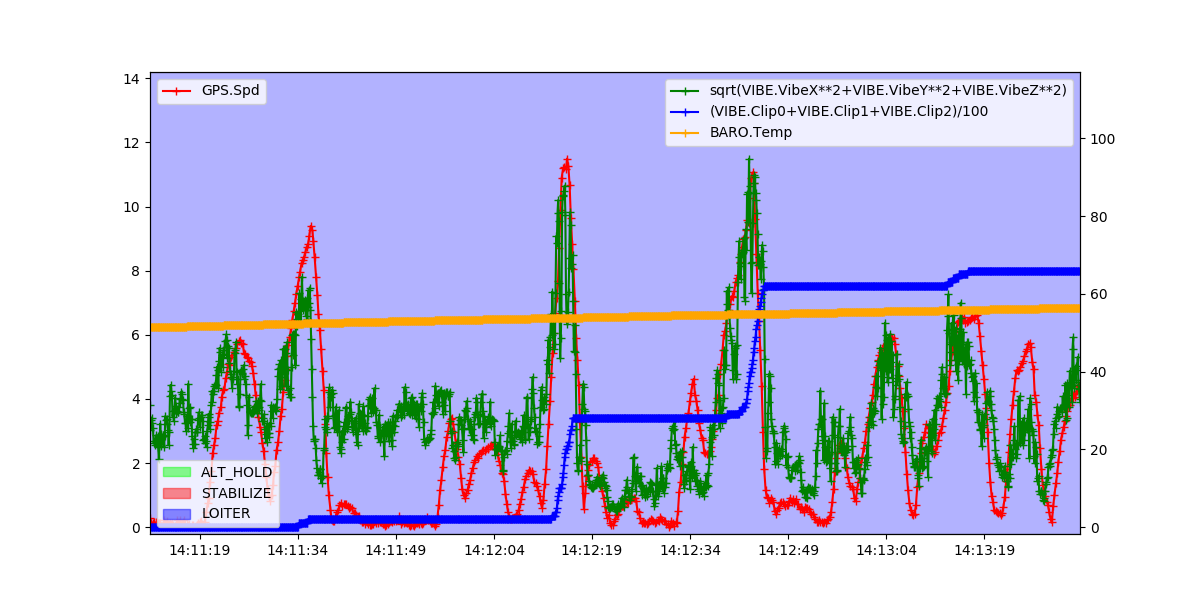
Not to hijack this thread, but here’s an example of why it’s a good idea to be able to fly in stabilize mode when testing…
Loiter mode in latest master works really well for flying around, but I ran into a problem yesterday with my test quad at high airspeeds. Something causes a lot of vibration when I give full right stick and this causes the quad to rocket into the sky in loiter and althold modes. Might this be caused by props that are too flexible?
If the weight is balanced, motors screws stuck, FC mounted with 3M foam, they are vibration risks ?
The biggest source of vibration is probably unbalanced props. I used a magnetic balancer to balance the ones on that quad. The 3M foam that came with the original (and I think the mRo) Pixhawks is good. I’ve also had good luck with Kyosho vibration absorption gel sheet.
Have you solved your problem ?
I haven’t figured it out yet. It might also be due to airflow causing the baro to read higher pressure as speed increases.
“If GPS Fix is less than 1 meter and GPS compass calibrated, why not use loiter mode in first take off ?”
Because you don’t know if the aircraft will actually fly yet. Look at how test pilots fly. They start with taxi tests, routine take offs, first flights with the gear down, easy climb outs, and so on to prove the aircraft will actually fly and does not have any bad habits.
I’ve been doing this for a long time, and I can tell you that Murphy’s Law has not been repealed. So, unless you take it by the numbers and conduct a proper flight test program, something will jump up and bite you.
In 99.9999999999999% of the time a fly-away is caused by PILOT ERROR, and the biggest one is not calibrating the compass properly.
And that statement about setting up geofencing and taking off the first time in loiter to prevent a fly-away is just plain wrong. If you haven’t flown it yet, how do you know that the aircraft will actually fly? If you haven’t flown it yet, how do you know that loiter, RTL, and the fail safes work?
Here’s a clue for you: The only way an aircraft running ArduCopter will fly-away in Stabilize is if you lose radio control and you have not set the low throttle (loss of radio) fail safe. So, in this case the radio failure would be due to Murphy’s Law, and no fail safe would be due to pilot error.
Hi Oldgazer, just straightening something out: I didnt actually say that as quoted above, but to set a geofence, fly in stabilise, land and disarm, if everything is OK then rearm and fly in loiter. We do this when ever the quadcopter comes out for play - not as a first flight ever.
I’d read the original question slightly differently, as I said I originally took it to be asking what to expect from loiter, rather than being the first test flight ever. So my next post was agreeing with kd0aij (and you too) that first flights and test flights should ALWAYS be in stabilise.
I agree with all your other sentiments, especially Murphy!
Roll-Pitch gains are used by FC stabilization or only on rc commands ?
After first flight in Stabilize mode, the copter seems to slowly drift on sides, should I try to change Roll-Pitch gains CH6 knob value ?
Unless the flight controller is in a GPS assisted flight mode the aircraft will drift if you let go of the sticks.
Stabilized mode maintains ATTITUDE, not position…
Gotcha… Murphy and I are well acquainted…
I must be in Stabilize to set Roll-Pitch gains ?