My quad simply flipped over just after takeoff in my first flight. I checked all the calibrations, rotor directions and stuff and did a second trial, unfortunately the same result.
The configuration is:
Pixhawk PX4
Dji flamewheel 450 frame
dji motors,
3rd party esc
FrSky receiver,
Futaba T7C transmitter
PPM Encoder
2500mAh 25C Lipo batterry
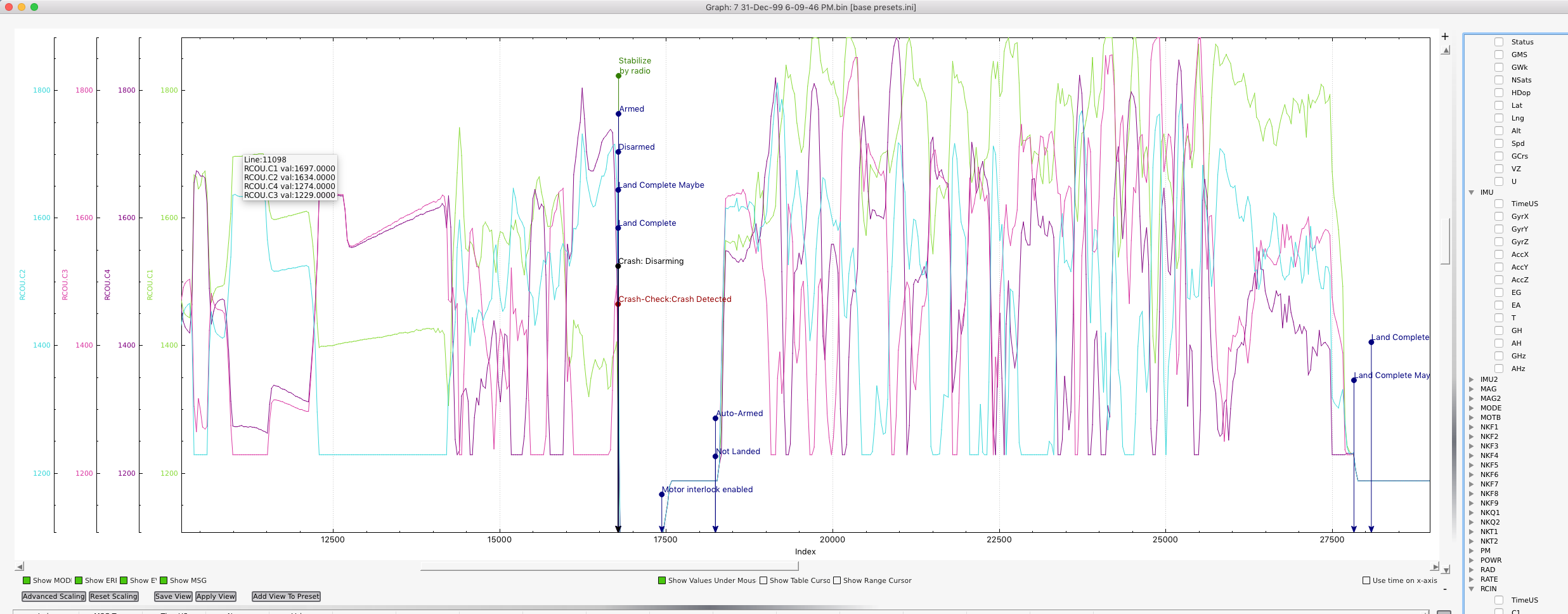
When I check the flight logs, the rate commands looked in the correct sense to me. But the quad response is sluggish, I guess.
Any comments will help, I do not know what way to go. Is it a controller issue, or related with the ESCs or Motors?
A quick look at RCout indicates the motors fighting against one another.
Do you have the right frame selected?
Are the motors spinning in the right direction?
Are the props on the correct motors?
Props right way up?
Is the flight controller oriented correctly, front to front of copter?
Did you do a motor run test without props?
Arm, tilt, low motors speed up, high motors slow down?
Arm, rc pitch forward, back motors speed up front motors slow down?
Same for roll?
props were correct before the flight, will double check next time
flight controller orientation is checked: there was a pitch bias of about 4deg. Corrected out by level calibration
I did a motor test as you described:
1: changing throttle command, quad on ground
2: throttle mid: change pitch/roll commands: pitch up/down, roll: left/right
3: throttle mid, no roll/pitch command: change quad attitude: pitch: down/up, roll: right/left
Have you calibrated your ESC’s?
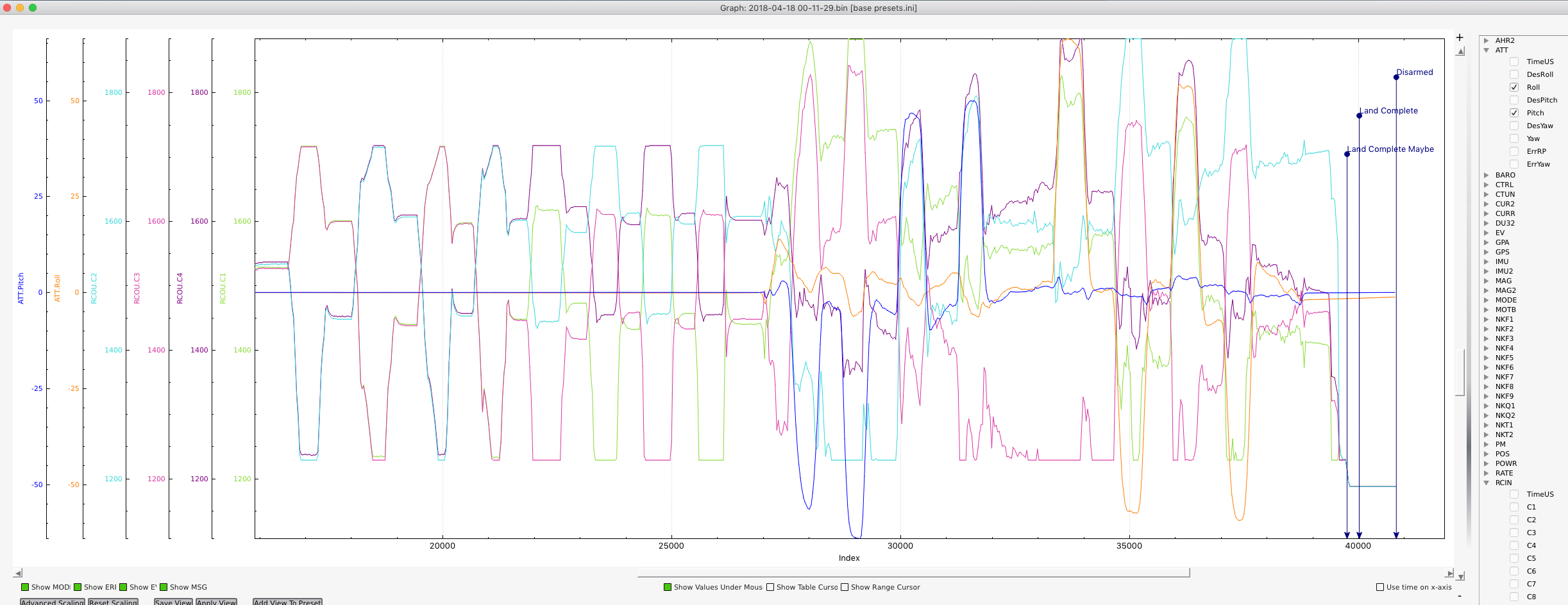
Pitch response seems good but the roll response is much less.
This is very evident when you picked it up and tested roll response and RCout3 flatlined.
The RC roll test did not bring RCout3 up to the same level as other motors.
I did the ESC calibration again. Then I found out that the order of the motors was not correct. Fixed it and it flies well now. Thank you for your help, for your time.