This was the maiden flight of a brand-new TRex 500X Dominator, but displayed visible side-to-side shaking in flight – enough to make me discontinue the flight.
All parts are new original manufacturer’s equipment, and the main blades are balanced perfectly before installation, and are not over-tightened. Head speed is governed by the Talon 90 ESC at 2200rpm. Is it possible to say from this log file what might be causing the shaking, please?
Hmmm, I noticed it saved itself as *.bin.jpg when I sent if to my Google Drive, so I renamed it as *.bin before posting the link. I’ll download it again this afternoon and re-post it. Thanks for letting me know Bill.
Thanks for your reply Lupus. But remember, the vibration of the frame is visible to the eye, so location of the FC is not the cause. I can maybe optimise the FC mounting once I’ve fixed the vibration.
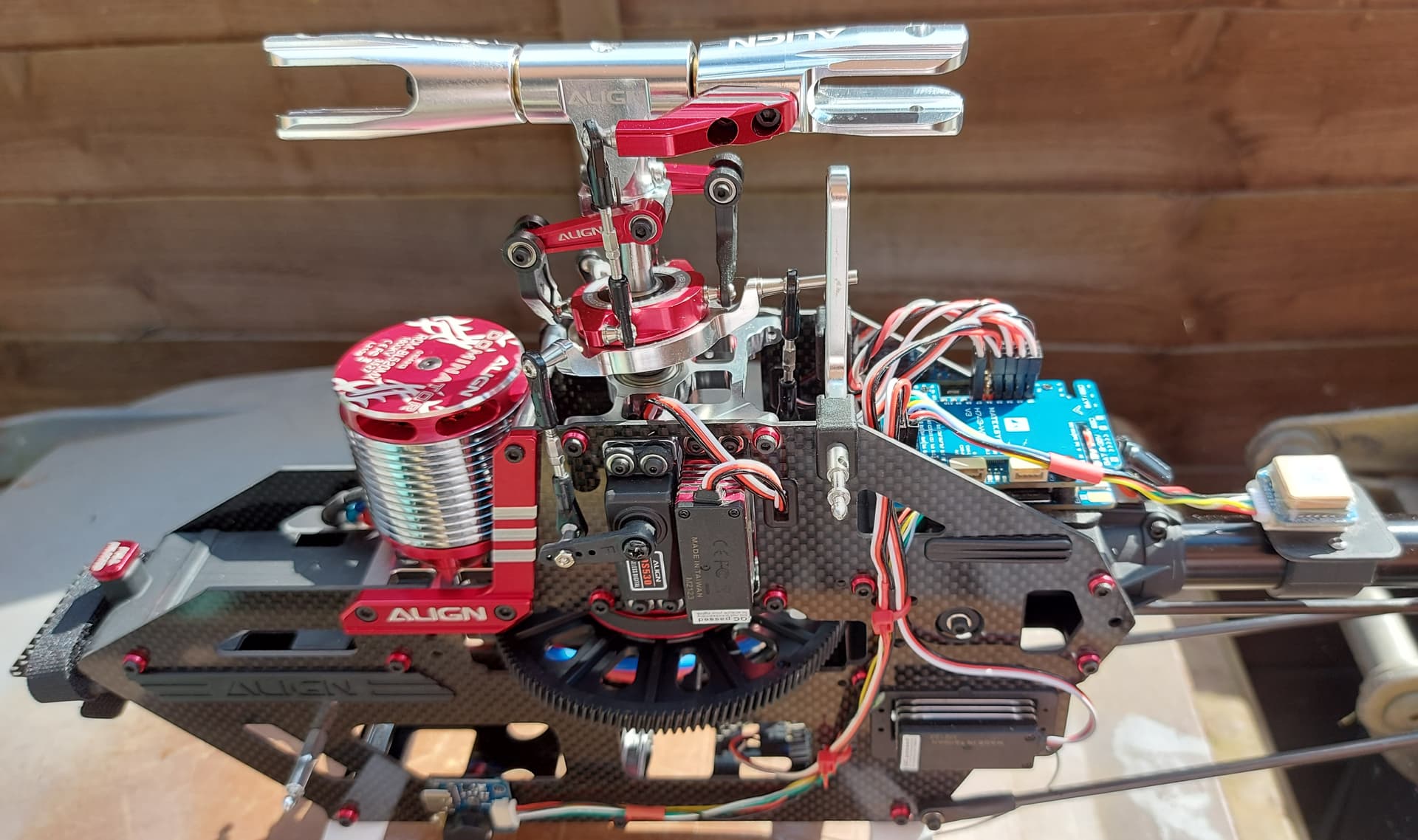
Anyway, here’s a pic of the setup. The general layout is exactly the same as my other two older 500s and a 550, neither of which have vibration problems.
Tailrotor balance? Check the main rotor shaft to ensure it is true. Check the frame bolts, gears and all rotating components. Make sure there isn’t binding in the gears. If it is visible without the main rotor blades then it is something mechanical.
Thanks guys. I was being lazy, hoping that something in the log (frequency of vibration perhaps) might suggest the location of the culprit
Unfortunately the vibration is not visible with the main blades off, for the heli is planted on the ground. Tomorrow I’ll spool up without tail blades, then without tail blade holders, then main blade holders, etc. etc. until the log shows the vibes disappearing or, at least, reducing. Last time I had this kind of problem was when I bought an HobbyKing500 heli, and solved it by replacing all the HK moving parts with Align parts I’ll be disappointed if brand-new Align parts need replacing.
Allan, also please set INS_LOG_BAT_OPT → 4.
Even though not the direct cause of the vibrations you are seeing, it would help if you lowered ATC_RAT_RLL_P, which is still at default value (start with /2).
Is there some backlash between crown and pinion or are they tight fit?
Since you are disassembling components, it would help diagnose if you moved the engine away from the crown (so not engaging the powertrain) and let the motor spin at nominal regime .
Good point Ferrosan. I’ll follow your config. suggestions too. Crown and pinion were set up so that a piece of copy paper could just pass through when turning by hand, so no unusual backlash.
Inconclusive results this afternoon, I think. Following are the maximum vibration levels recorded in various scenarios:-
Z = 56.81, Y = 44.77, X = 55.12 First flight, skids seen to be vibrating badly
Z = 54.51, Y = 31.63, X = 64.72 Main blades removed
Z = 56.09, Y = 36.56, X = 55.91 Tail rotor hub and blades removed
Z = 42.74, Y = 56.33, X = 82.04 Main rotor assembly removed
Z = 32.10, Y = 47.10, X = 88.02 Motor disengaged from drive
Z = 37.07, Y = 31.03, X = 82.22 Motor re-engaged
Note that #4 and #6 are the same configuration apart from re-positioning the motor.
Close visual inspection during #4 revealed no wobbling of the top of the main shaft or the top of the motor. The only ‘defect’ I can see is that the main slant drive gear is slightly warped in the horizontal plane, so I’m going to replace that before going further.
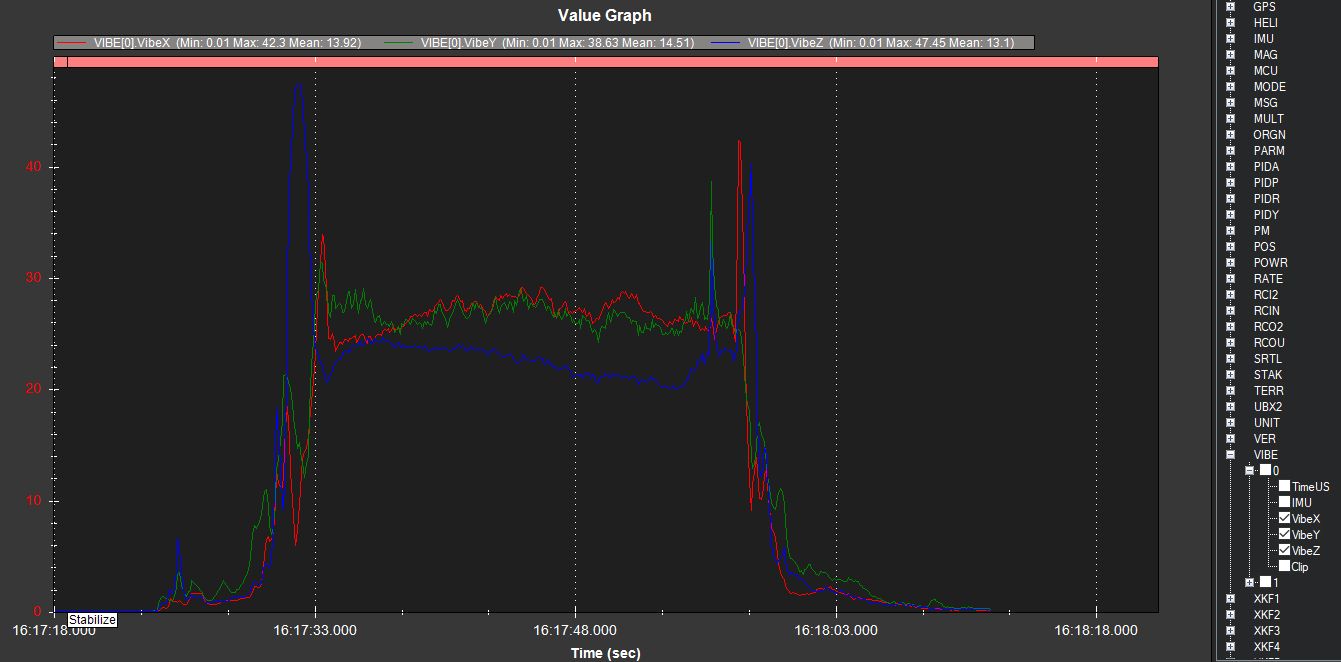
Were all test done at the same RPM? When I was looking through the log I noticed very strong peak in Z vibrations during spool up. I would suggest sweeping through RPM range with IMU logging enabled for FFT.
Hi Allan, I think you can spare that money. Align gears have always been like that.
I would like to see the logs, but I think it’s the motor the main culprit. Quick test, you can drop headspeed to 1800 rpm and see what the FFT looks like.
Thanks for your replies. I use the ESC’s own governing (it’s a CC Talon 90) to set the rpm at 2200. I can hear that it seems to spool up to slightly above the target rpm then quickly settles down to a constant speed. The tests were all run for long enough that it had settled at 2200.
I wish I could drop to 1800 rpm, but the stock gearing doesn’t seem to permit CC’s programming to go less than 2200 – it gives me an error message something about the pwm is too low for reliable running. I’ve just asked a relative in Thailand to get me a smaller pinion, as they seem to be out of stock in UK and Europe. So I’ll be able to lower the head speed in a couple of weeks time.
I’m just reading the wiki on IMU logging for FFT analysis, so I’ll have a go at that shortly.
Done that just now. ATC_RAT_RLL_P was already at 0.024, so I’ve left it at that. Not sure if you were suggesting 0.20?
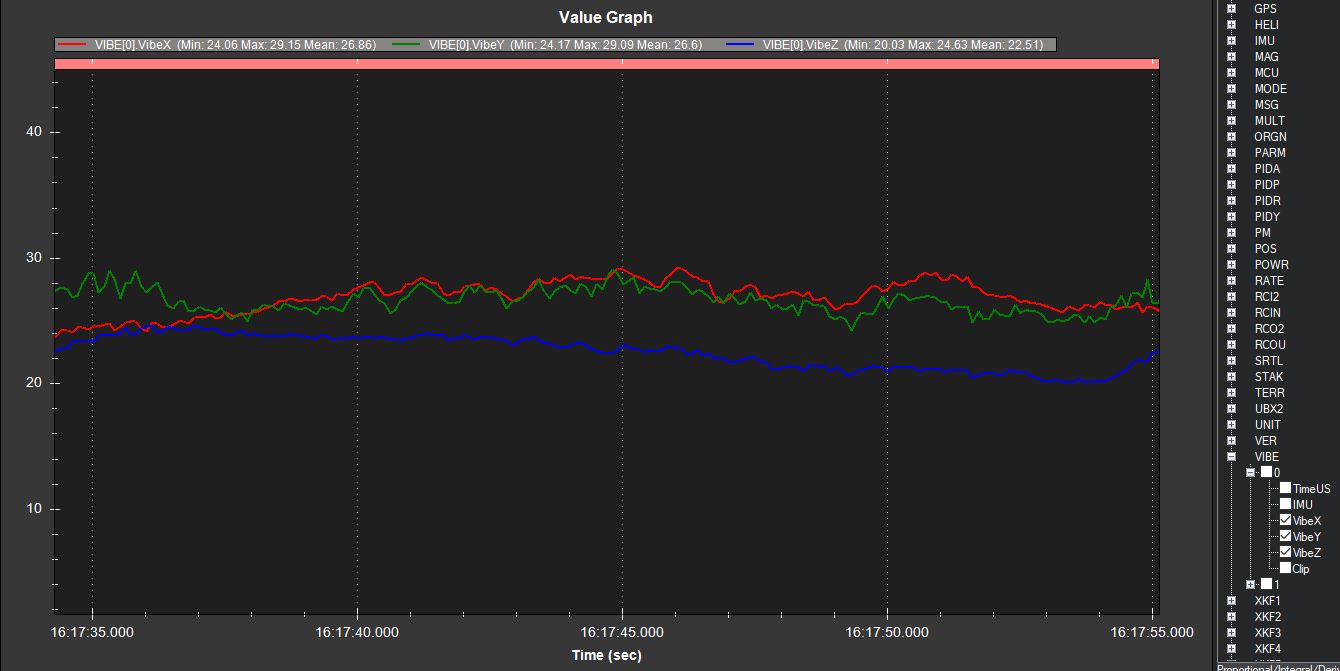
Today I disassembled and reassembled everything and found no mechanical issues, reduced the head speed to 2100 (as low as the CC programmer will allow with 12T pinion and 134T main), and had a short hover. The visible rapid side-to-side shaking of the skids was still obvious, starting about a second after the copter got airborne. But looking at the vibe graphs I see that the overall maximums are noticeably lower than my initial flight and, perhaps more importantly, if I ignore the spool-up and shut-down they’re all below 30 during the hover period.
The blade holders twist freely in opposite directions, as they’re supposed to. There’s no in/out slop either.
Did another test hover today with ATC_RAT_RLL_P reduced to 0.012. Skids still shaking badly, but am I imagining it that the shake is less?! Log shows vibe results very similar to previous best.