Can you post this last flight log? Did you fly at 2100rpm? Gains might still be high, but need to see logs.
Yes, this test was at 2100 rpm. Log is attached. Can it simply be too-high gains? I was beginning to worry that the motor itself might be unbalanced (though visually and audibly it runs smoothly) because of the vibe logs while it was disconnected from the main gear.
I’ve seen the video of a full-size heli self-destructing due to resonance. But this vibration starts only after the heli gets off the ground and is in a steady hover, which is several seconds after it has reached its governed rpm.
I would suggest to look into Xnova or Egodrift motor brands. Finer balancing and quality bearings will make day to night difference to what you have now.
Lowering the ATC_RAT_RLL_P gain has reduced the oscillation amplitude, I suggest to decrease it further down to 0.008 and set ATC_RAT_RLL_D to 0.
Are you familiar with trasmitter based tuning procedure? You should perform it once the initial tuning is stable enough (no visible oscillations) Manual Tuning Instructions — Copter documentation
Also, earlier on I forgot to mention setting INS_LOG_BAT_MASK to 1.
In a correctly designed helicopter the resonance would be far below governor setpoint so you only briefly go through it during spool up and spool down. (This is why some helicopters have a note in pilot manual not to operate rotor on the ground in certain range like 30-65% RPM).
Egodrift 4025HT series 1250kV and Xnova 4020-1350 look good, but it’s questionable whether they will fit due to being about 6mm greater diameter than the stock Align motor – and look at the prices!
I did another test hover today with your suggested settings, and the visible vibration is gone, and the recorded vibration once airborne is also slightly lower. So without the visible vibration I can now proceed to manual tuning as per the wiki. Today’s log attached.
Thank you both for your help.
1 Like
Hi Allan, glad to hear you made it.
I know, but in the long run you will not regret investing more in way better gear.
Looking through your log, I had the confirmation I was looking for:
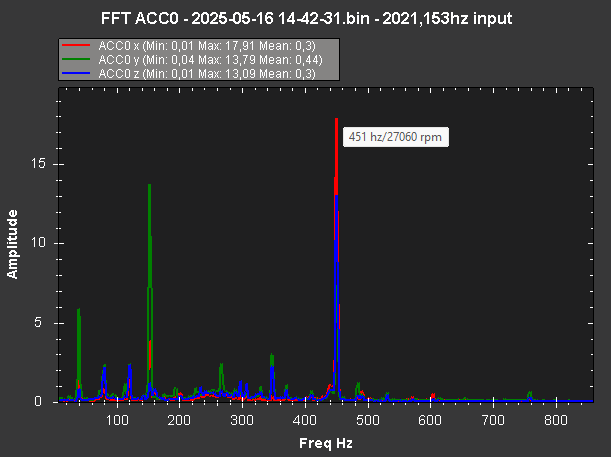
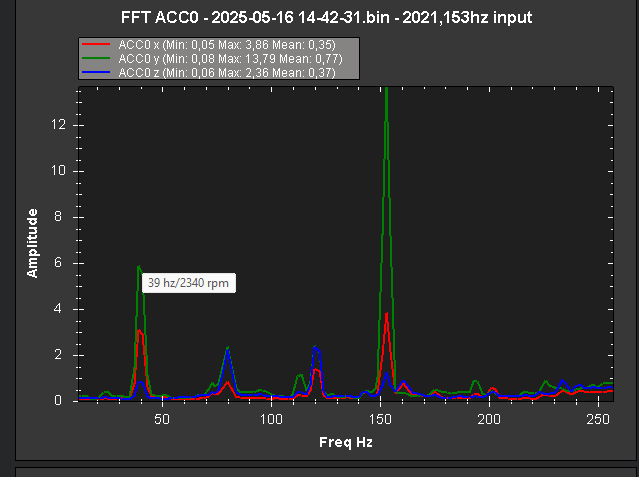
Also, you mentioned you are running 2100rpm headspeed, did you double check that with a tacho or is it the estimation from the Castle thingy? because the FFT says it’s 2340 rpm (lateral dominant- so it’s definetly main rotor):
Thanks for looking into this so deeply. I relied on CC’s data; I’ll have to find my tacho and put a new battery in it so I can check when I go to the field tomorrow.
I can see where you get 2340 from, but what does the higher peak at 27060 represent? Presumably that’s the motor itself, for when I take the gearing (12/134) into account I get a similar result of 2423 rpm.
I’ll start saving for a Xnova or Egodrift motor ![]()
1 Like
Is this any better? Today I moved the motor pinion by 90 degrees – it has two grub screws on it, one of which engages with the flat on the shaft, so I swapped that with the other one that just grips the round part of the shaft.
Can you tell me how you extracted the rpm data please? I can’t find anything relating to FFT ACCO in the log file.
Hi Allan, in MP hit Ctrl+F, then press the FFT button and “IMU batch sample” in the following menu.
Doesn’t look like it:
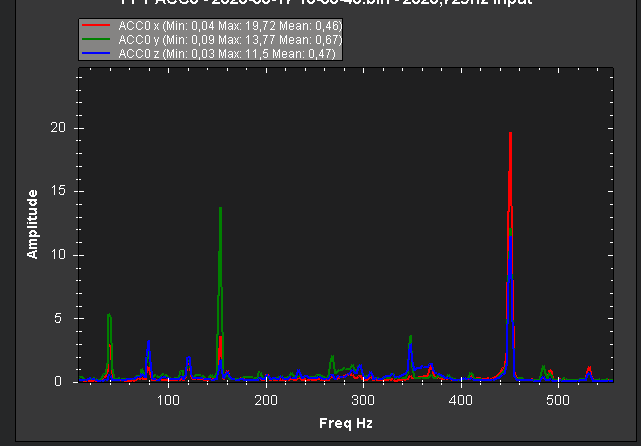
My tacho said 2420 today, so matches the recorded motor rpm peak corrected for the gearing.
Thanks for the tip about Ctrl-F. Any further analysis can wait until I’ve installed an 11T pinion that’s on its way.
1 Like
Balancing the blades isn’t enough. You have to balance the ENTIRE HEAD including the swash plate and links. To do that you need to put it on a spare main shaft and use a Dubro Prop Balancer.
1 Like
Must admit I’ve never done that, for I’ve never figured out a simple way to do it. My prop balancer is a magnetic one, so can’t handle a heli shaft. But I can do it with a spare shaft the way I balance my heli blades, using two metal straight-edges to roll it on.
But in this instance Ferrosan has convinced me that the major source of vibration is the motor.