I’m learning to use the Web Filter tool and trying to make sure I understand things correctly. When I did a test flight today with what I think are the correct parameters I got this log. Sign in to your account
When reviewing the log in the web filter tool it seems that I have a few different peaks of noise, which appear to be potentially harmonics as they show up around 100Hz, 200Hz, 300Hz, 400Hz
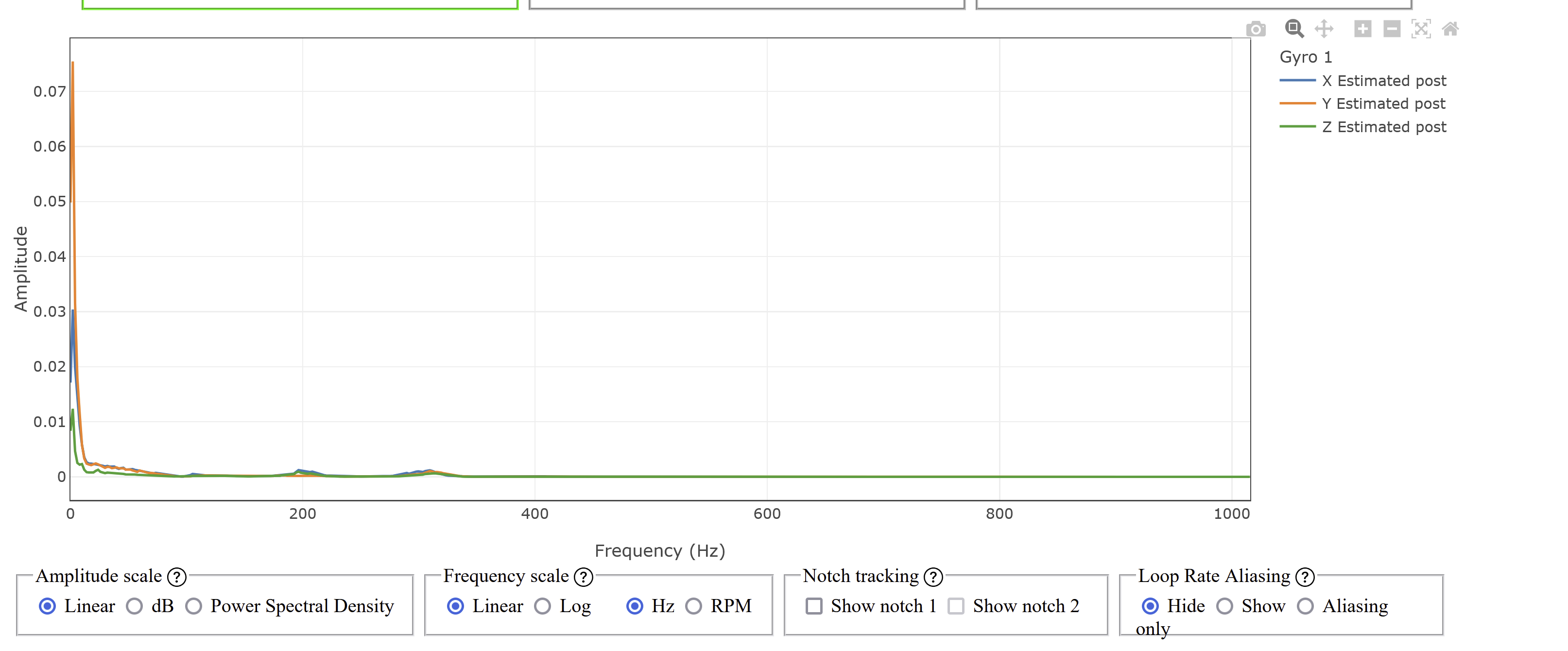
The noise seems to be removed by the low-pass filter - INS_GYRO_FILTER when I view the post-filter results, which is good, correct?
As I understand filtering (a very basic understanding), then I would think that to improve my filtering in terms of overall performance, I would want to try to reduce the amount of filtering the low-pass filter is doing in order to reduce latency there to then target those peaks with some notch filters, correct? But I know adding more harmonics is costly to the CPU, and adding 4 harmonics doesn’t quite seem to look right either as the noise peaks are not exactly on each subsequent 100Hz increase and I understand that making the notches “wider” is also computationally expensive.
What are my next steps from here? Does anyone have any insight to share? Thanks in advance.
It is if it’s the right cutoff frequency for the craft. What size props?
Right, apply the minimum notch filter to get the job done. You can see that you don’t need the 2nd or 3rd harmonic notch to do the job in the post filter data.
I would suggest this if the 20Hz gyro frequency is correct for that craft. Test it with the Estimated Post Filter function.
I thought the default low-pass filter cutoff was 40, which I think would be about right for a 10in prop, - Mission Planner “Initial Tune Parameter” tool says 42, but it looks like mine was set to 20Hz in this flight, unfortunately. I’m assuming I’d want to take that up to 42, which would give me this estimate, using your other settings.
Out of curiosity, will I need to redo the actual flight because the low-pass was affecting how the dynamic notches could move somehow with it being at the wrong value?
Yes. There will be more lower frequency content which could effect tracking for the 1st mode notch. You can change the Gyro filter in the Review Tool and then look at estimated post filter again but honestly I have not used the function like that before so safer to just make another flight. After configuring using estimated you want to do another flight anyway to make sure it’s doing was was predicted. I have found it to predict well.
When viewing this log and the prior side-by-side, I don’t see much difference between the two, though I’m probably missing something. Can anyone assist in the interpretation of this log/tool? Thank you.
I’m on my iPad right now so I can’t look at the log. I’ll compare my filter settings for my X500 and see how they look. Off the top of my head it ends up being very close to,the defaults. Yes, the gyro filter is 42.
@Allister notch parameters look good. Attitude and Rate look pretty good for some default parameters. You could give Auto Tune a try to tighten things up.
Thanks @Allister and @dkemxr . I am wondering about the process for arriving at those settings. Once we know the low-pass filter is set appropriately, are we just essentially trying to filter the least amount possible and reviewing it through the “estimated post-filter” tool? Decrease the INS_HNTCH_BW, reduce the number of notches if possible, etc.? Do we ever try moving the low-pass filter to a higher frequency to reduce latency?
I start by targeting the primary frequency. Add harmonics if needed (and as few as possible, ideally none if you can get away with it). Then I try to reduce the BW and ATT as much as I can while still being happy with the estimated results. I’ve found the estimations tend to be on the conservative side so if the estimations are acceptable I’ve found the actual results are usually good unless there’s some strange harmonic or frame resonance.